CIP-2021 : B25J 9/16 : Controles por programa (control total de una fábrica, es decir,
control centralizado de varias máquinas, G05B 19/418).
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/16[1] › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/16 · Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
CIP2021: Invenciones publicadas en esta sección.
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL.
(02/07/2020). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: SALAMANCA POBLETE,Hugo, BAEZA RAMIREZ,Luis.
Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica de revestimientos de molinos para la molienda de minerales en procesos de conminución, cuya configuración y operación permita mejorar la tarea de manipulación al poseer un mayor grado de libertad y/o flexibilidad en sus movimientos, proporcionando al procedimiento un mayor grado de certeza y eficacia, por lo tanto optimizando el tiempo de detención del molino por mantenimiento, así como evitar los riesgos a los que se pueda ver sometido el personal de mantenimiento, el sistema comprende al menos una estructura de soporte, al menos un sistema de alimentación y desplazamiento de revestimientos, al menos un sistema manipulador robótico de los revestimientos, al menos una herramienta de manipulación de revestimientos, al menos un sistema de visión artificial y al menos un sistema de control.
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables.
(24/06/2020) Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la cápsula que incluye un robot en una base , la base que tiene una porción superior y una porción inferior , el método que comprende las etapas de:
abrir una puerta de un volumen de almacenamiento del contrapiso , en donde la puerta está conectada de manera giratoria a un piso y se mueve entre una posición cerrada y una posición abierta, en donde en la posición cerrada la puerta se encuentra alineada con el piso y en la posición abierta la puerta se extiende hacia arriba hacia una posición vertical;
elevar la base de manera vertical a través de la abertura que se forma por la puerta…
Aparato de perforación y método.
(13/05/2020) Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente desde un primer lado de la parte hasta un segundo lado de la parte , siendo el primer lado opuesto al segundo lado, comprendiendo el aparato:
un primer robot ;
un primer miembro acoplado al primer robot ;
una herramienta de perforación acoplada al primer robot ;
un segundo robot ; y un segundo miembro acoplado al segundo robot ; en donde el aparato está dispuesto para presionar los miembros contra los lados opuestos primero y segundo de la parte para mantener la parte e impedir la desviación de al menos una porción de…
Adaptador de enchufe, instrumento de ajuste y robot asociado.
(22/04/2020). Solicitante/s: KUKA Deutschland GmbH. Inventor/es: TSCHARNUTER,DIETMAR, NITZ,GERNOT, BRÄNDLE,GERHARD.
Adaptador de enchufe, que presenta:
- una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste ,
- un dispositivo de enchufe , que está configurado para conectar de forma desmontable el adaptador de enchufe a un dispositivo de enchufe antagonista de una abertura de acceso en un robot respecto a una marca de posición de referencia del robot , y
- una varilla palpadora , que está configurada para acoplar una punta de medición del instrumento de ajuste a la marca de posición de referencia, en donde el dispositivo de enchufe presenta una sección enchufable (22a), que está configurada para enchufar axialmente la sección enchufable (22a) al dispositivo de enchufe antagonista del robot.
PDF original: ES-2803901_T3.pdf
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones.
(22/04/2020) Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los pasos de
a) proveer un conjunto de condiciones para trayectorias de transporte de piezas de trabajo candidatas, comprendiendo las condiciones, al menos, las posiciones de recogida y depósito para una pieza de trabajo en una multitud de estaciones de la prensa de estación múltiple;
b) proveer propiedades de máquina de la multitud de estaciones y de, al menos, un dispositivo de transferencia para transportar la pieza de trabajo desde una primera de la multitud de estaciones a una segunda de la multitud de estaciones , en la cual las propiedades de máquina incluyen parámetros de la multitud…
Pasador de cizallamiento para calibración de robots.
(01/04/2020). Solicitante/s: ABB SCHWEIZ AG. Inventor/es: OLSSON, MATS, ANDERSSON, HANS, DANIELSSON, STEFAN, GÖRANSSON,ANDREAS, FIXELL,PETER, VIILUP,SIIM, HANSSEN,SVEN.
Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot , comprendiendo el pasador de cizallamiento :
un cuerpo alargado que comprende una zona de debilitamiento que define una ubicación de rotura en caso de sobrecarga,
caracterizado por que la ubicación de rotura está cubierta con una protección que impide la fragmentación cuando se rompe el pasador de cizallamiento.
PDF original: ES-2799889_T3.pdf
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control.
(25/03/2020) Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar daños por desgaste en el conducto protector , que comprende las etapas de:
- Generar un primer impulso de presión de fluido dentro del conducto protector ,
- Registrar posteriormente la presión del fluido dentro del conducto protector durante un primer período de tiempo especificado como una primera curva de presión del fluido
- Almacenar en la memoria la primera curva de presión del fluido ,
- Generar un segundo impulso de presión de fluido dentro del conducto protector ,
- Registrar posteriormente la presión del fluido dentro del conducto protector durante un segundo período de tiempo especificado como una segunda curva de presión del fluido…
(19/03/2020). Solicitante/s: ERLE ROBOTICS, S.L. Inventor/es: MAYORAL VILCHES,Victor, HERNANDEZ CORDERO,Alejandro, MUÑIZ ROSAS,Aday, MUGURUZA GOENAGA,Iñigo.
En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras representativas del objeto de la misma, un controlador que permite implementar una arquitectura abierta para controladores o sistemas de control multi-robot universales. De conformidad con la realización preferente de la presente invención, es posible desarrollar, con base en el mismo método, toda clase de sistemas de control compatibles con una pluralidad de robots, independientemente de su fabricante o su tipología.
Equipo de control con optimizador integrado.
(11/03/2020) Equipo de control para una maquina con al menos un eje , en donde el equipo de control esta programado con un programa de sistema, en donde el equipo de control esta configurado de tal modo que
- en una primera etapa (S1) a traves de una interfaz hombre-maquina recibe primeros parametros (P1),
- en una segunda etapa (S2) mediante los primeros parametros (P1) concreta un primer problema tecnologico general en un primer problema tecnologico especial,
- en una tercera etapa (S3) mediante el primer problema tecnologico especial determina una primera parametrizacion de un problema de optimizacion,
- mediante el problema de optimizacion parametrizado con la primera parametrizacion dentro del equipo de control, por medio de un optimizador para una secuencia de valores…
MÁQUINA CON CABEZAL OPTIMIZADO DE CORTE E INSERCIÓN DE TERMINALES EN UNA PLACA PCB.
(28/02/2020) 1. Máquina con cabezal de corte e inserción de terminales en una placa PCB donde dicho cabezal comprende un bastidor en el que se encuentran:
- un primer alimentador configurado para recibir al menos una primera cinta que comprende unos primeros terminales que van a ser cortados e insertados;
- un conjunto de corte;
caracterizado porque comprende:
- un segundo alimentador configurado para recibir al menos una segunda cinta (9') que comprende unos segundos terminales (3') que van a ser cortados e insertados; y
- el conjunto de corte comprende un primer subconjunto de corte configurado para cortar los primeros terminales de la primera cinta y un segundo subconjunto de corte configurado para cortar los segundos terminales (3') de la segunda cinta (9'); y
- un conjunto de inserción…
Sistema de laminado automatizado de chapas y método de colocación.
(19/02/2020) Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende:
un robot ;
un efector terminal sobre el robot para la elevación de una chapa desde un kit de chapas y la colocación de la chapa en una localización preseleccionada, comprendiendo el efector terminal:
un escáner ;
una cámara ;
un agarrador ; y
un sensor de fuerza ;
una cámara fija para grabación de la posición de la chapa sobre el efector terminal ; y
un controlador conectado con el robot y el efector terminal ,
en el que el escáner está sobre el efector terminal para la detección de características con relación a la localización en la que ha…
Método y medios para controlar un robot.
(15/01/2020) Un método para controlar un robot que comprende un brazo robótico, donde dicho brazo robótico comprende una sección base, una pluralidad de secciones de brazo, estando conectadas dos secciones de brazo adyacentes por medio de una articulación, y unos medios de detección dispuestos en cada articulación respectiva para detectar la rotación de la articulación respectiva, donde el método comprende:
un usuario coloca de manera manual al robot en una posición dada P0 con relación a objetos en el entorno del robot, por medio de lo cual una parte o punto P ubicado en el brazo robótico se mueve para definir una o más características geométricas con relación a dichos objetos en el entorno del robot, por medio de los medios de detección y se establece una relación entre una o más de dichas características geométricas y unas primeras coordenadas del…
Sistema y método de orientación automatizada para una máquina de movimientos coordinados.
(08/01/2020) Un método de orientación automatizada, que comprende:
tomar una imagen inicial de una pluralidad de piezas de trabajo (Wa, Wb, Wc) de forma similar con una cámara montada en un componente móvil de una máquina de movimiento coordinado ;
reconocer visualmente las piezas de trabajo (Wa, Wb, Wc) individuales, entre la pluralidad de piezas de trabajo (Wa, Wb, Wc) de forma similar, utilizando un programa que se ejecuta en un procesador en comunicación con la cámara y la máquina de movimiento coordinado , en donde el programa compara la imagen inicial con un modelo de enseñanza almacenado en una base de datos, en donde el modelo…
Kit robótico reconfigurable.
(08/01/2020) Un sistema robótico reconfigurable, que comprende:
una pluralidad de módulos servo digitales, en donde cada uno de la pluralidad de módulos servo digitales incluye un servomotor que incluye un sensor de posición del servo;
una pluralidad de bloques de construcción elementales, en donde la pluralidad de bloques de construcción elementales está conectada a la pluralidad de módulos servo digitales para construir una figura robótica que tiene articulaciones controladas por posición, en donde los bloques de construcción elementales son combinables con la pluralidad de módulos servos digitales para construir figuras…
Robot humanoide con capacidades para evitar colisiones y de recuperación de trayectoria.
(25/12/2019) Un procedimiento de control de una trayectoria (530a, 730) de al menos uno de los miembros superiores e inferiores de un robot humanoide, comprendiendo dicho procedimiento:
- almacenar una trayectoria inicial con un punto objetivo en una memoria del robot;
- adquirir, desde al menos un procedimiento de detección controlado desde el robot a bordo, datos representativos de una posición de uno o más obstáculos (540b, 910c);
- calcular, por un procesador a bordo del robot:
una envoltura (410b, 810) de dicho robot;
una posición relativa de la envoltura y el uno o más obstáculos;
una probabilidad de colisión de la envoltura con un obstáculo; y,
una serie de comandos que comprenden:
- detectar la presencia de un obstáculo en la envoltura;
-…
Procedimiento para optimizar perfiles de movimiento, procedimiento para proporcionar perfiles de movimiento, dispositivo de control, instalación y producto de programa informático.
(04/12/2019) Procedimiento para optimizar los perfiles de movimiento (B1, B2) en una instalación (A), donde la instalación (A) presenta al menos una prensa (1a, 1b, 1c) con una herramienta (7a, 7b) y una pluralidad de sistemas de transferencia (3a, 3b ), donde el movimiento de la respectiva herramienta (7a, 7b) se describe mediante respectivamente un perfil de movimiento de la prensa (B1) y el movimiento del respectivo sistema de transferencia (3a, 3b) se describe mediante respectivamente un perfil de movimiento de transferencia (B2), donde la optimización de los perfiles de movimiento (B1, B2) comprende los siguientes…
Sistema y estación de trabajo para el diseño, fabricación y ensamblaje de construcciones de biomaterial.
(04/12/2019) Un sistema de bioensamblaje que comprende un componente de modelado de tejidos y un componente de estación de trabajo de bioensamblado robótico, el componente de modelado de tejidos comprende una interfaz de usuario, al menos un conjunto de herramientas para realizar una operación de objeto seleccionada desde la creación, edición, modelado, transformación, modulación de propiedades de imagen, bocetos, soporte de impresión, simulación, pruebas de materiales y combinaciones de los mismos, una base de datos de materiales y un software ejecutable por una máquina para facilitar un método para diseñar un modelo volumétrico…
Localización dentro de un entorno usando fusión de sensores.
(04/12/2019) Un aparato que comprende:
una pluralidad de sistemas de datos configurados para generar una pluralidad de flujos de datos en la cual la pluralidad de flujos de datos incluye un primer tipo de flujo de datos y un segundo tipo de flujo de datos, en donde cada punto de datos en el primer tipo de flujo de datos incluye una medición de incertidumbre, y en donde cada punto de datos en el segundo tipo de flujo de datos no incluye una medición de incertidumbre;
un modificador configurado para aplicar una distribución de probabilidad al segundo tipo de flujo de datos para formar un flujo de datos modificado; y
un estimador de pose ubicado a bordo…
Efector final magnético y dispositivo para guiar y posicionar el mismo.
(20/11/2019) Dispositivo de guiado extracorpóreo para un objeto magnético intracorpóreo con un dispositivo de posicionamiento accionado a motor que tiene como máximo tres grados de libertad a activar, a saber, para el movimiento traslativo de una interfaz de conexión distal del dispositivo de posicionamiento en un sistema de coordenadas espaciales extracorpóreo al que está conectado o se puede conectar un efector final del dispositivo de guiado extracorpóreo, que tiene como máximo dos grados de libertad a activar, a saber, para el movimiento rotativo de un generador de campo magnético , preferiblemente imanes permanentes del efector final , caracterizado por que el dispositivo de posicionamiento tiene un número salientes o brazos accionados respectivamente por motor, de los que los salientes…
Procedimiento para el filtrado de imágenes de objetos objetivo en un sistema robótico.
(13/11/2019). Solicitante/s: ZenRobotics Oy. Inventor/es: VALPOLA,HARRI.
Procedimiento, que comprende:
agarrar un objeto con un elemento de agarre unido a un brazo robótico;
capturar como mínimo dos imágenes de origen de un área que comprende el objeto con un sensor de imagen mientras el objeto se está moviendo con el brazo robótico;
calcular una imagen promedio de las, como mínimo, dos imágenes de origen;
caracterizado por
calcular una imagen de varianza de las, como mínimo, dos imágenes de origen;
formar una imagen de filtrado a partir de la imagen de varianza; y
obtener una imagen de resultado enmascarando la imagen promedio utilizando la imagen de filtrado como una máscara de bits.
PDF original: ES-2730952_T3.pdf
Dispositivo para corrección de errores para máquinas CNC.
(30/10/2019) Un método para determinar un error de posicionamiento de una máquina CNC, en donde la máquina CNC está equipada con un elemento de calibración , estando el elemento de calibración en una primera posición, comprendiendo el método las etapas de:
leer primero datos de sensor emitidos por al menos un sensor mientras que el elemento de calibración se encuentra en la primera posición,
en donde los datos de sensor corresponden a una distancia entre un punto en la superficie del elemento de calibración y el al menos un sensor , o
en donde un elemento de contacto del al menos un sensor es desviado por el elemento de calibración y los datos de sensor corresponden a una distancia en la que se desvía el elemento de contacto;
…
SISTEMA AUTOMÁTICO PARA GRANALLADO DE PIEZAS.
(24/10/2019). Solicitante/s: ESEKI, S.A.L. Inventor/es: IRIGOYEN FRESNEDA,Jon, MURGIA MENDIA,Iñaki.
El sistema de la invención, partiendo de un brazo robótico de granallado convencional, centra sus características en que el mismo en vez de presentar una posición fija e inamovible, se dispone sobre un eje telescópico , desplazable verticalmente el cual a su vez es desplazable horizontalmente, según el eje Y a través de un segundo carro (8'), el cual a su vez es desplazable controladamente sobre unas guías longitudinales en la dirección X, a través de un primer carro . De esta manera, se consigue posicionar el brazo robótico prácticamente en cualquier posición con respecto a la pieza a granallar, evitando así tener que cambiar ésta constantemente de posición para llevar a cabo dicho proceso de granallado.
SISTEMA AUTOMÁTICO PARA GRANALLADO DE PIEZAS.
(17/10/2019). Solicitante/s: ESEKI, S.A.L. Inventor/es: IRIGOYEN FRESNEDA,Jon, MURGIA MENDIA,Iñaki.
Sistema automático para el granallado de piezas.
El sistema de la invención, partiendo de un brazo robótico de granallado convencional, centra sus características en que el mismo en vez de presentar una posición fija e inamovible, se dispone sobre un eje telescópico , desplazable verticalmente el cual a su vez es desplazable horizontalmente, según el eje Y a través de un segundo carro (8'), el cual a su vez es desplazable controladamente sobre unas guías longitudinales en la dirección X, a través de un primer carro . De esta manera, se consigue posicionar el brazo robótico prácticamente en cualquier posición con respecto a la pieza a granallar, evitando así tener que cambiar ésta constantemente de posición para llevar a cabo dicho proceso de granallado.
PDF original: ES-2727675_B2.pdf
PDF original: ES-2727675_A1.pdf
Dispositivo de diagnóstico de fallos y método de diagnóstico de fallos.
(09/10/2019) Un dispositivo de diagnóstico de fallos aplicable a un dispositivo mecánico provisto de un motor como fuente para accionar un eje de movimiento, y configurado para adquirir una posición de movimiento del eje de movimiento y un valor del par de perturbación aplicado al eje de movimiento cada período predeterminado, y para diagnosticar que se está produciendo un fallo cuando el valor del par de perturbación es mayor que un umbral de determinación de fallos, que comprende:
una unidad de diagnóstico de fallos configurada para restablecer el umbral de determinación de fallos, caracterizado por que comprende además:
una unidad de determinación de efectos de mantenimiento configurada para calcular un cambio en el valor del par de perturbación antes y después…
Robot de rectificado para el casco de un buque y procedimiento de rectificado del casco de un buque.
(02/10/2019) Aparato de tratamiento de superficie para el casco de un buque, que comprende:
un cabezal de trabajo equipado con una unidad de aplicación, cabezal de trabajo que está fijado a un dispositivo actuador que conecta el cabezal de trabajo a un bastidor y puede moverse en al menos dos direcciones perpendiculares entre sí en relación con el bastidor dentro de un área de mecanizado,
caracterizado por una unidad de control electrónica que está conectada técnicamente por señales a dicho dispositivo actuador para controlar el movimiento de dicho cabezal de trabajo a lo largo de dichas al menos dos direcciones, comprendiendo la unidad de control:
una interfaz de entrada para leer los datos de exploración del casco del buque, que describen la geometría de la superficie del casco del buque,
- un módulo de filtrado diseñado para eliminar los datos de…
MÁQUINA Y PROCEDIMIENTO PARA POSICIONAR OBJETOS.
(23/09/2019). Solicitante/s: MULET VALLES,TOMAS. Inventor/es: MULET VALLES,TOMAS, MARTÍNEZ MÉNDEZ,Fernando.
Máquina y procedimiento para posicionar objetos. Dicha máquina comprende una primera banda transportadora configurada para recibir una pluralidad de objetos (O); medios de visión artificial configurados para identificar la posición y la forma de los objetos (O); medios de recogida robotizados configurados para recoger los objetos (O) según la información recibida de los medios de visión artificial ; y una segunda banda transportadora configurada para permitir la salida de dichos objetos (O). La pista de transferencia presenta carros de transferencia (7, 7a, 7b, 7c) configurados para moverse en circuito cerrado a lo largo de la misma permitiendo el control de su velocidad y posición de forma independiente, donde dichos carros de transferencia (7, 7a, 7b, 7c) se encuentran configurados para recibir los objetos (O) procedentes de los medios de recogida robotizados y entregar dichos objetos (O) a la segunda banda transportadora.
PDF original: ES-2725300_A1.pdf
Aparato portátil para controlar un robot y método del mismo.
(04/09/2019) Un aparato portátil para controlar un robot , incluyendo el aparato portátil :
un sensor de orientación , que está adaptado para medir la orientación de dicho aparato portátil ;
un dispositivo de interfaz hombre-máquina, HMI , que está adaptado para detectar movimiento manual bidimensional en relación con dicho dispositivo HMI ; y
una unidad de procesamiento , que está adaptada para recibir una primera señal que representa dicha orientación medida de dicho aparato portátil y una segunda señal que representa dicho movimiento manual bidimensional detectado en relación con dicho dispositivo HMI y
controlar una parte de dicho robot para que…
Aparato y método para ensamblar piezas de trabajo.
(04/09/2019) Un sistema de ensamble que comprende un aparato de ensamble y un dispositivo de posicionamiento , tal como un robot industrial, que tiene una porción extrema que comprende un conector , comprendiendo el aparato de ensamble :
un conjunto de estructura de soporte , tal como una estructura de bastidor, que está provisto de una porción de acoplamiento para acoplar el conjunto de estructura de soporte al dispositivo de posicionamiento , tal como un robot industrial, y
una pluralidad de miembros de fijación capaces de fijar una pieza de trabajo ,
en el que cada miembro de fijación está conectado con el conjunto de estructura de soporte a través de un…
Dispositivo automatizado vaciador de bolsas de producto sanguíneo congelado.
(14/08/2019). Solicitante/s: GRIFOLS WORLDWIDE OPERATIONS LIMITED. Inventor/es: BOIRA BONHORA,Jordi, CASANOVA MONTPEYÓ,Oriol, PAGES BECERRA,DAVID.
Dispositivo automatizado vaciador de bolsas de producto sanguíneo congelado, que comprende:
- un extractor para el producto;
- una tolva para recibir producto;
- medios de transporte para transportar la bolsa desde un área de recepción al extractor del producto;
- unos medios de corte situados en la trayectoria de la bolsa entre el área de recepción y el extractor del producto caracterizado por que los medios de corte están alojados en un soporte oscilante que comprende medios aptos para la absorción de la energía de los impactos de la bolsa contra los medios de corte y para el retorno de dichos medios de corte a su posición inicial.
y en que los medios de transporte de la bolsa están configurados para modificar su trayectoria en función de la forma de la bolsa.
PDF original: ES-2744079_T3.pdf
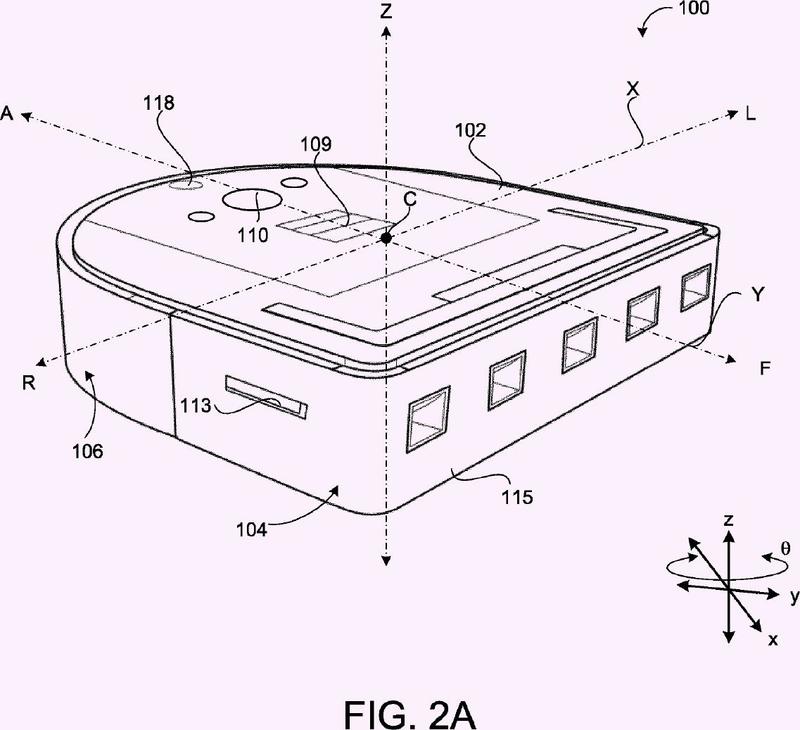
Movimiento restrictivo de un robot móvil.
(24/07/2019). Ver ilustración. Solicitante/s: IROBOT CORPORATION. Inventor/es: WILLIAMS,MARCUS, LU,PING-HONG, JOHNSON,JOSEPH M.
Un robot que comprende:
un cuerpo que se puede mover en relación con una superficie ;
uno o más dispositivos de medición dentro del cuerpo para emitir información basándose en una orientación del cuerpo en una ubicación inicial en la superficie ; y
un controlador dentro del cuerpo para determinar la orientación del cuerpo basándose en la información, y
caracterizado por que el controlador está configurado además para restringir el movimiento del cuerpo a un área impidiendo el movimiento del cuerpo más allá de una barrera virtual que define un límite que el robot no puede cruzar que es creado basándose en la orientación del cuerpo y la ubicación inicial, y
el controlador está configurado además para almacenar la barrera virtual que ha de ser utilizada subsiguientemente para restringir el movimiento del robot.
PDF original: ES-2746498_T3.pdf
Robot humanoide con ruedas omnidireccionales basado en un controlador de posición y velocidad lineal predictivo.
(03/07/2019) Un robot humanoide con un cuerpo unido a una base de suelo móvil omnidireccional equipado con:
- un sensor de posición de cuerpo, un sensor de posición de base y un sensor de velocidad angular para proporcionar medidas,
- accionadores que comprenden motores de articulaciones y al menos 3 ruedas ubicadas en la base móvil omnidireccional, con al menos una rueda omnidireccional,
- extractores para convertir medidas detectadas,
- un supervisor para calcular comandos de posición, velocidad y aceleración a partir de los datos extraídos,
- medios para convertir comandos en instrucciones para los accionadores,
caracterizado porque el supervisor comprende:
- un controlador de estado de no inclinación que usa un modelo de robot en el que…
Procedimiento de control de mezcla de 5 ejes y 6 ejes para robots industriales y sistema de los mismos.
(26/06/2019) Un procedimiento de control de mezcla de cinco ejes y seis ejes para robots industriales, el robot industrial incluye un primer, un segundo, un tercer, un cuarto, un quinto y un sexto eje de unión, y una pluralidad de barras; las barras están conectadas en serie por el primer, el segundo, el tercer, el cuarto, el quinto y el sexto eje de unión; donde el procedimiento de control de mezcla incluye las siguientes etapas:
etapa 1: instalar un efector final en cada extremo del quinto eje de unión y el sexto eje de unión; ajustar el primer, el segundo, el tercer, el cuarto y el quinto eje de unión, y las barras conectadas en serie por el primer, el segundo, el tercer, el cuarto y el quinto eje de unión…
{kind=link}