CIP-2021 : B25J 9/16 : Controles por programa (control total de una fábrica, es decir,
control centralizado de varias máquinas, G05B 19/418).
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/16[1] › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/16 · Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
CIP2021: Invenciones publicadas en esta sección.
CALIBRACION SEMIAUTOMATICA DE UN BRAZO DE ACCIONAMIENTO DE UN ROBOT.
(16/08/2004). Solicitante/s: TMS PRODUKTIONSSYSTEME GMBH. Inventor/es: SPIETH, ULI.
Procedimiento para calibrar un brazo de accionamiento de un robot que se ha programado fuera de línea mediante un modelo matemático para un dispositivo , en especial para la fabricación automática en la industria del automóvil, en el cual se mide un dispositivo de medida en relación con el sistema de coordenadas del dispositivo real, el brazo de accionamiento del robot se desplaza en su sistema de coordenadas de forma autónoma hasta un punto de referencia prefijado y esta posición se mide de forma autónoma mediante el dispositivo de medición , en donde la discrepancia entre las coordenadas de este punto de referencia en el sistema de coordenadas del dispositivo real y el sistema de coordenadas del robot se determina por ordenador, y para la calibración del robot se adapta el modelo matemático del dispositivo al dispositivo real en función de esa discrepancia.
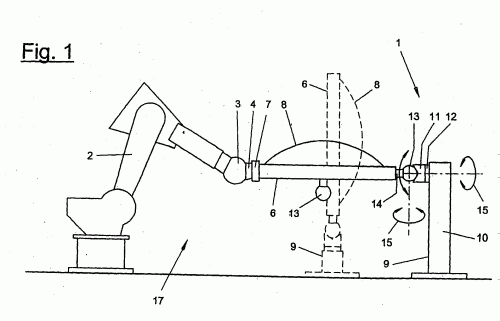
DISPOSITIVO DE POSICIONAMIENTO PARA SOPORTES DE PIEZAS DE TRABAJO O PARA PIEZAS DE TRABAJO.
(01/07/2004). Ver ilustración. Solicitante/s: KUKA SCHWEISSANLAGEN GMBH. Inventor/es: FISCHER, WOLFGANG, STIMMEL, BURKHARD.
Procedimiento para el posicionamiento de soportes de piezas de trabajo o de piezas de trabajo , que son sostenidos y guiados por un manipulador multiaxial , en el cual está previsto al menos un dispositivo de soporte , en el cual se apoya el soporte de pieza de trabajo o la pieza de trabajo en uno o más ejes de forma que se pueda mover y que se pueda orientar en distintas posiciones.
DISPOSITIVO DE COMPENSACION DE LOS EFECTOS DE LAS DEFORMACIONES DE UN SOPORTE DE SUSTENTACION DISPUESTO ENTRE UN PORTADOR Y UNA CARGA.
(16/06/2004). Solicitante/s: THOMSON-CSF. Inventor/es: MOREAU, DOMINIQUE.
Dispositivo de compensación de los efectos de las deformaciones de un soporte (PYL) dispuesto entre un portador (PRT) y una carga (CHG1, CHGn), para como mínimo un sistema de control de la orientación de un eje predeterminado (LDV2) que puede experimentar los citados efectos, caracterizado porque el dispositivo comprende: - un número predeterminado de captadores de esfuerzos implantados en la estructura del soporte, siendo las respuestas (R1, R2, R3) de estos captadores función de las cargas experimentadas por el soporte, - un módulo de tratamiento de estas respuestas que permite, por comparación con una base de tabulación preestablecida, determinar el valor de la componente estática de por lo menos una rotación (x, y, z) experimentada por el eje, debida a las deformaciones del soporte que experimenta las citadas cargas, siendo este valor enviado hacia el sistema de control a fin de efectuar una compensación de la rotación experimentada por el eje.
ROBOT MOVIL INTERACTIVO PARA SERVICIOS EN MUSEOS.
(16/01/2004) Se patenta la integración de dispositivos para un robot móvil interactivo para servicios en museos. El robot móvil resultado está dividido en dos partes principales, una inferior constituida por la plataforma móvil y otra superior que la forma el sistema de control de la interacción donde radican la toma de decisiones y la planificación. La primera está destinada a proporcionar movilidad y, junto con la segunda garantizar su autonomía en entornos con personas y objetos en movimiento. Para la navegación y prevención de colisiones se utiliza una plataforma móvil que integra un anillo de sensores ultrasónicos e infrarrojos a la que se incorpora un sistema de posicionamiento láser por triangulación basado en balizas…
DISPOSITIVO PARA LA MANIPULACION O TRANSFORMACION DE ELEMENTOS O SUBCONJUNTOS INDUSTRIALES.
(01/01/2004) 1. Dispositivo para la manipulación o transformación de elementos o subconjuntos industriales, de forma automática, caracterizado esencialmente por el hecho de consistir en un mecanismo que permite el desplazamiento de un sistema de estructura dispuesto en el sentido de los ejes cartesianos (XY), accionados mediante dos elementos motores, controlados de forma automática mediante un conjunto electrónico, y acoplados a una única transmisión de poleas, dispuesto todo ello de manera que la estructura correspondiente al eje horizontal de las abscisas (X) se desplazará tanto en sentido horizontal como en sentido vertical, mientras la otra estructura, la correspondiente…
SISTEMAS DE ROBOT Y METODOS PARA CONTROLAR EL ACCIONAMIENTO DE ROBOTS.
(16/12/2003) SE PROPORCIONA UN SISTEMA MODULAR DE ROBOT CON MEDIOS DE MEMORIA 23 PARA MEMORIZAR INFORMACION SOBRE TAREAS, QUE SE REFIEREN A LAS TAREAS DE CADA UNIDAD COMPONENTE (3 A 12) Y MEDIOS DE RECONOCIMIENTO PARA RECONOCER LA TAREA DE CADA UNIDAD COMPONENTE, BASANDOSE EN LA INFORMACION SOBRE TAREA DE CADA UNIDAD COMPONENTE. ADEMAS, EL SISTEMA DE ROBOT MODULAR ESTA DOTADO DE UNOS MEDIOS DE DETECCION DEL ESTADO DE ENLACE PARA DETECTAR EL ESTADO DE ENLACE DE CADA UNIDAD COMPONENTE, MEDIOS DE MEMORIA PARA MEMORIZAR EL ESTADO DE ENLACE DE CADA UNIDAD COMPONENTE EN CADA CATEGORIA, CON LO QUE LA CONFIGURACION DEL SISTEMA DE ROBOT QUE DEBE MONTARSE SE CLASIFICA EN CATEGORIAS…
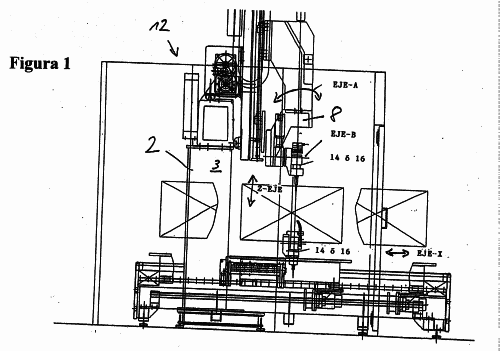
SISTEMA DE CONTROL DE MAQUINAS HERRAMIENTAS O ROBOT DE EJES MULTIPLES PARA MULTIPLES HERRAMIENTAS.
(16/12/2003). Ver ilustración. Solicitante/s: HUBER & GRIMME BEARBEITUNGSSYSTEME GMBH. Inventor/es: GRIMME,WOLFGANG.
Sistema de control de máquinas herramienta o robot de ejes múltiples para múltiples herramientas, con como mínimo un primer componente herramienta que comprende una primera parte de fijación de herramienta , una primera herramienta que se apoya de forma giratoria (eje C) en la parte de fijación de herramienta y un accionamiento giratorio ; una parte principal de máquina , sobre la que está sujeto el primer componente herramienta y por medio de la cual la primera herramienta puede moverse alrededor de múltiples ejes (ejes X, Y, Z, A, B, y C); y un dispositivo de control para conducir la primera herramienta a lo largo de una curva de pista mediante el control del movimiento a lo largo o alrededor de múltiples ejes (ejes X, Y, Z, A, B, y C).
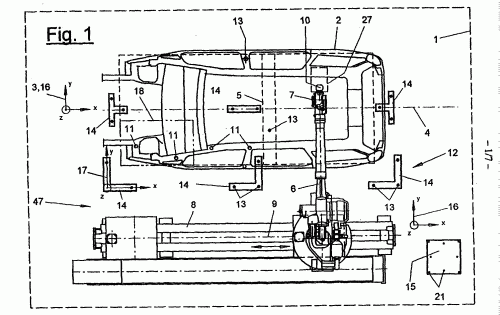
PROCEDIMIENTO Y DISPOSITIVO PARA CALIBRAR ESTACIONES DE MEDICION CON ROBOTS, MANIPULADORES Y DISPOSITIVOS OPTICOS DE MEDICION ASOCIADOS.
(01/11/2003). Ver ilustración. Solicitante/s: KUKA SCHWEISSANLAGEN GMBH. Inventor/es: ROOS, EBERHARD.
Procedimiento para calibrar robots de medición de varios ejes y dispositivos ópticos de medición , que son desplazados junto con los robots, en especial sensores tridimensionales (3D), dentro de una estación de medición para piezas de trabajo , en especial para carrocerías en bruto de automóviles, caracterizado porque el calibrado se realiza en una secuencia de mediciones con por lo menos tres etapas de calibrado consecutivas entre sí, calibrándose en la primera etapa el dispositivo óptico de medición con su punto de trabajo , calibrándose a continuación el robot de medición con sus ejes con ayuda del dispositivo óptico de medición transportado junto con el robot, compensándose el error de posicionamiento mediante la corrección de los datos de la máquina del robot de medición y luego calibrándose la relación de correspondencia entre el robot de medición y la pieza de trabajo con ayuda del dispositivo óptico de medición transportado con el robot.
DISPOSITIVO ELECTRONICO DE TRATAMIENTO DE DATOS-IMAGEN, PARA LA SIMULACION DEL COMPORTAMIENTO DEFORMABLE DE UN OBJETO.
(01/10/2003) UN DISPOSITIVO ELECTRONICO COMPRENDE UN INTERFAZ DE USUARIO CON REALIMENTACION DE FUERZA CONFORME A LAS REACCIONES DE UNA HERRAMIENTA, UN MODULO DE "COLISION" DESTINADO A ESTIMAR UN PUNTO DE INTERSECCION ENTRE UNA RECTA QUE MATERIALIZA UN DESPLAZAMIENTO DERIVADO DE UNA ACCION DE LA HERRAMIENTA Y EL MALLADO DE SUPERFICIE DE UN OBJETO DESIGNADO Y UN MODULO DE FUERZAS INTERNAS QUE ESTABLECE UN CAMPO DE FUERZAS INTERNAS ENTRE NUDOS DE UNA PARTE AL MENOS DEL MALLADO VOLUMINICO DEL OBJETO A PARTIR DEL DESPLAZAMIENTO APLICADO A LOS NUDOS QUE PERTENECEN A LA MALLA DE SUPERFICIE QUE CONTIENE EL PUNTO DE INTERSECCION, DE CONDICIONES A LOS…
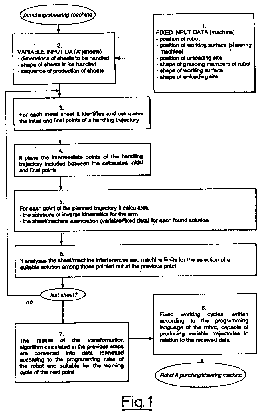
METODO OPERATIVO PARA UN AREA DE TRABAJO QUE COMPRENDE UN ROBOT SERVIDOR DE UNA PRENSA DE DOBLADO PARA CONFORMAR LAMINAS METALICAS.
(01/03/2003) SE PRESENTA UN METODO OPERATIVO PARA UN AREA DE TRABAJO QUE COMPRENDE UN ROBOT ANTROMORFO ESCLAVO DE UNA PRENSA COMBADORA PARA TRABAJAR UNA PLANCHA DE METAL , EL METODO COMPRENDE A) LA DETECCION DE DATOS DE ENTRADA FIJOS FORMADOS POR LAS POSICIONES GEOMETRICAS EN EL ESPACIO EN EL ROBOT , DE LA PRENSA Y DE AL MENOS UNA UNIDAD DE SUMINISTRO , B) LA DEFINICION DE DATOS DE ENTRADA VARIABLES FORMADOS POR EL GROSOR DE LA PLANCHA DE METAL , LA ALTURA, EL ANGULO Y LA DIRECCION DE CADA COMBADURA, LA LONGITUD Y LA ORIENTACION DE CADA COMBADURA, LA POSICION DE UNA HERRAMIENTA COMBADORA , C) EL PROCESAMIENTO DE LOS DATOS ANTES MENCIONADOS EN UNA UNIDAD DE PROCESAMIENTO MEDIANTE UN ALGORITMO BASADO EN LAS SOLUCIONES DE LAS CINEMATICAS INVERSAS PARA GENERAR AUTOMATICAMENTE CICLOS DE SUMINISTRO,…
CORREDERA DE NAVEGACION PARA MEDIR OBJETOS Y PROCEDIMIENTO PARA SU EMPLEO.
(01/03/2003). Solicitante/s: DAIMLERCHRYSLER AG. Inventor/es: ZIEGLER, MARCUS.
Corredera de navegación para la medición óptica de objetos, que contiene un componente con estructura de rejilla - sobre el cual están aplicadas varias marcas de medida , caracterizada porque están dispuestas en el componente varios nervios de unión en cuyo lado alejado del componente está montado un dispositivo de fijación correspondiente.
PROCEDIMIENTO DE CONTROL DE UN ROBOT INDUSTRIAL QUE SE DESPLAZA SEGUN UNA TRAYECTORIA DADA.
(16/02/2003) LA INVENCION SE REFIERE A UN PROCEDIMIENTO PPARA EL CONTROL DEL MOVIMIENTO DE UN ROBOT INDUSTRIAL A LO LARGO DE UN CAMINO DADO (P1-P4) CON UNA VELOCIDAD DESEADA (V), DICHO ROBOT INDUSTRIAL TIENE UN NUMERO DE EJES DE MOVIMIENTO Y POR CADA EJE EQUIPO DE SERVOCONTROL DEL MOVIMIENTO AXIAL DE ACUERDO CON VALORES DE REFERENCIA ( TA KORR ) SUMINISTRADOS CON ESE FIN. PRIMERO, SE CALCULAN ESOS ANGULOS ( HI I ) QUE SE NECESITAN P PARA ASUMIR LA PROXIMA POSICION SOBRE EL CAMINO. DEPENDIENDO DE LOS ANGULOS AXIALES Y DE UN PRIMER MODELO MATEMATICO, QUE DESCRIBE LAS PROPIEDADES DINAMICAS Y ESTATICAS DEL ROBOT, SE CALCULA PPARA CADA UNO DE LOS EJES DE MOVIMIENTO EL…
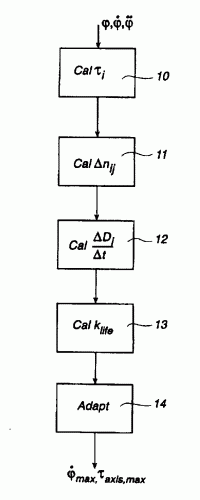
PROCEDIMIENTO DE CONTROL DE UN ROBOT INDUSTRIAL.
(16/02/2003). Ver ilustración. Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: ELFVING, STAFFAN, BROG RDH, TORGNY, DAHLQUIST, H KAN, HENRIKSSON, TORD.
LA INVENCION SE REFIERE A UN METODO PARA EL CONTROL DE UN ROBOT INDUSTRIAL, QUE TIENE UNA SERIE DE EJES DE DESPLAZAMIENTO CON UN SENSOR DE POSICION PARA CADA UNO DE LOS REFERIDOS EJES QUE ESTA ADAPTADO PARA ENVIAR UNA SEÑAL DE SALIDA QUE DEFINE LA POSICION ACTUAL DEL EJE Y UN SISTEMA DE CONTROL PARA CONTROLAR LOS EJES DEL ROBOT. CONTINUAMENTE DURANTE EL FUNCIONAMIENTO DEL ROBOT, PARA AL MENOS UN PUNTO MECANICAMENTE CRITICO (I) DEL ROBOT, LA CARGA SIGNIFICATIVA ( TA I ) DURANTE UN INTERVALO PREFIJADO ( DL T ) SE CALCULA BASANDOSE EN LAS SEÑALES DE SALIDA ( PH 1 , ( PH 2 ..., PH 6 ) DE LOS SENSORES DE POSICION Y EN UN MODELO MATEMATICO DEL ROBOT. ADEMAS, LA TASA DE FATIGA ( DL D I / DL T ) DEL PUNTO SE C ALCULA EN FUNCION DE LA CARGA CALCULADA Y SABIENDO LA RESISTENCIA A LA FATIGA (N IJ ) DEL MATERIAL EN EL PUNTO CRITICO. EL RENDIMIENTO ( PH AXIS,MAX , TA AXIS,MAX ) DEL ROBOT SE AJUSTA, DEPENDIENDO DE LA TASA DE FATIGA Y DE LA VIDA DE SERVICIO DESEADA (T LIFE )PARA EL ROBOT.
PROCEDIMIENTO PARA MANIPULAR CHAPAS METALICAS EN UNA ZONA DE TRABAJO QUE COMPRENDE UNA MAQUINA HERRAMIENTA Y UN ROBOT.
(16/02/2003). Ver ilustración. Solicitante/s: SALVAGNINI ITALIA S.P.A.. Inventor/es: MAROBIN, MARIO.
UN METODO PARA MOVER LAS HOJAS METALICAS DE UN AREA DE TRABAJO MEDIANTE UN ROBOT ANTROPOMORFO QUE CONSISTE EN A) TOMAR DATOS DE ENTRADA FIJOS PRESELECCIONADOS QUE IDENTIFICAN LA GEOMETRIA EN EL ESPACIO DE LOS COMPONENTES DEL AREA DE TRABAJO ; B) TOMAR DE UNA MAQUINA HERRAMIENTA DATOS DE ENTRADA VARIABLES PRESELECCIONADOS INDICATIVOS DE LAS DIMENSIONES Y DE LA FORMA DE UNA HOJA METALICA PRESELECCIONADA A MANIPULAR Y LA SECUENCIA DE TRABAJO DE HOJAS METALICAS PRESELECCIONADAS; C) PROCESAR LOS DATOS DE ENTRADA FIJOS Y VARIABLES EN UNA UNIDAD DE PROCESAMIENTO PARA GENERAR AUTOMATICAMENTE DATOS DE SALIDA QUE IDENTIFICAN UNA TRAYECTORIA PRESELECCIONADA DE LA HOJA METALICA A MANIPULAR Y D) TRANSFERIR LOS DATOS DE SALIDA A UNA UNIDAD DE CONTROL DEL ROBOT PARA ACCIONAR DICHO ROBOT PARA QUE MUEVA LA HOJA METALICA A LO LARGO DE LA TRAYECTORIA PRESELECCIONADA PARA MANIPULAR ASI DICHAS HOJAS METALICAS SELECCIONADAS SEGUN EL TIPO.
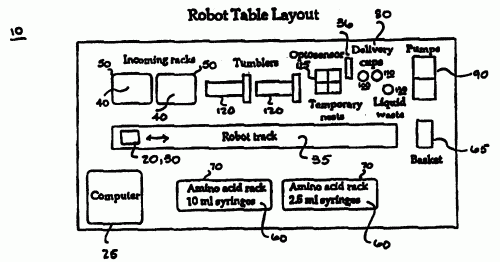
APARATO Y METODO PARA LA SINTESIS MULTIPLE DE COMPUESTOS ORGANICOS EN SOPORTE POLIMERO.
(16/12/2002). Ver ilustración. Solicitante/s: SELECTIDE CORPORATION. Inventor/es: LEBL, MICHAL, KRCHNAK, VIKTOR, SELIGMANN, BRUCE.
LA INVENCION SE REFIERE A UN SISTEMA DE SINTESIS DE FASE SOLIDA EMPLEANDO UN ROBOT TOTALMENTE AUTOMATIZADO QUE OPERA CON UN NUEVO PROTOCOLO DE TIEMPO EJECUTADO POR UN ORDENADOR PARA REALIZAR EFICIENTEMENTE MULTIPLES TAREAS SINTETICAS. EL ROBOT TOTALMENTE AUTOMATIZADO SE MUEVE A LO LARGO DE UNA PISTA Y ESTA EQUIPADO CON UN BRAZO CON PINZAS QUE PUEDE COGER, POSICIONAR Y ACCIONAR JERINGAS QUE PUEDEN CONTENER SOPORTES SOLIDOS Y REACTIVOS DE AMINOACIDOS. EL NUEVO PROTOCOLO DE TIEMPO SE REALIZA SIGUIENDO UNOS PASOS EN LOS CICLOS DE SINTESIS PARA DIFERENTES COMPUESTOS, TALES COMO PEPTIDOS, SOBRE UNA BASE SECUENCIAL.
DISPOSITIVO SENSOR, EN PARTICULAR PARA DETERMINAR LA POSICION DE UN OBJETO EN EL ESPACIO, COMO POR EJEMPLO LA POSICION DE UN PARABRISAS DE UN VEHICULO RESPECTO A DICHO VEHICULO.
(16/12/2002). Ver ilustración. Solicitante/s: AUTOMOBILES PEUGEOT AUTOMOBILES CITROEN. Inventor/es: BLANC, CHRISTOPHE, HUMBERT, BRUNO.
LA PRESENTE INVENCION CONSISTE EN UN DISPOSITIVO CON FUNCIONES DE SENSOR PARA DETERMINAR LA POSICION RELATIVA DE UN OBJETO EN EL ESPACIO, Y TAMBIEN EN UN PROCEDIMIENTO DE MONTAJE AUTOMATICO DE DOS OBJETOS DE UN ROBOT EQUIPADO POR LO MENOS CON DICHO DISPOSITIVO CON FUNCIONES DE SENSOR. EL DISPOSITIVO CON FUNCIONES DE SENSOR SE CARACTERIZA POR EL HECHO DE QUE COMPRENDE UN CUERPO PRINCIPAL MONTADO GIRATORIO EN UNA PIEZA DE SOPORTE ; UNA PRIMERA TECLA DE CONTACTO MOVIL EN TRASLACION, QUE ENTRA EN CONTACTO CON EL OBJETO SUSCEPTIBLE DE DESPLAZARSE EN ROTACION CON EL CUERPO PRINCIPAL ; UN PRIMER SENSOR SUSCEPTIBLE DE MEDIR EL VALOR DE DESPLAZAMIENTO DE LA TECLA DE CONTACTO , Y UN ELEMENTO CON FUNCIONES DE LEVA DE RECUPERACION , QUE PERMITE DESPLAZAR UNA TECLA RIGIDA EN UNA DIRECCION PERPENDICULAR A LA DEL DESPLAZAMIENTO DE LA TECLA DE CONTACTO . LA INVENCION ES DE APLICACION PRINCIPALMENTE EN EL MONTAJE AUTOMATICO DE PARABRISAS DE VEHICULOS AUTOMOVILES.
SISTEMA DE METROLOGIA DINAMICAMENTE RIGIDO DE ALTA AMPLITUD DE BANDA, DE MEDIDA Y CONTROL DE PROCESOS INDUSTRIALES INTELIGENTES.
(16/04/2002) APARATO QUE PROPORCIONA CONTROL EN TIEMPO REAL DE UN ELEMENTO DE GOBIERNO OPTICO QUE INCLUYE UN PAR DE DIRECTORES ESTABILIZADOS DE RAYOS LASER . CADA SLBD INCLUYE UNA BASE, DIRECCION DE RAYOS Y APARATO DE ESTABILIZACION ACOPLADO MECANICAMENTE A LA BASE , TRES LASERES DE RAYOS DE REFERENCIA Y UN LASER DE RAYOS ESTABILIZADO ACOPLADO A LA BASE . CADA DIRECCION DE RAYOS Y APARATO DE ESTABILIZACION INCLUYE UN ELEMENTO DE GOBIERNO OPTICO Y UN DETECTOR DE INCLINACION DEL EJE. EL ELEMENTO DE GOBIERNO OPTICO ESTA ACOPLADO OPTICAMENTE AL LASER DE RAYOS ESTABILIZADO Y LO GOBIERNA . EL SUBSISTEMA DE REFERENCIA INCLUYE TRES DETECTORES DE REFERENCIA POSICIONADOS FIJOS EN RELACION CON UNA PIEZA A TRABAJAR PROPORCIONANDO UN SISTEMA DE COORDENADAS DE LA PIEZA A TRABAJAR LOCALMENTE RIGIDO. LOS TRES DETECTORES REFERENCIADOS ESTAN RESPECTIVAMENTE EN COMUNICACION…
APARATO MAESTRO-ESCLAVO PARA EL MANIPULADOR DE UNA PRENSA PLEGADORA.
(16/03/2002) UN APARATO TELEMANDADO PARA EL MANIPULADOR DE UNA PRENSA DE CURVAR LAMINAS DE METAL . EL APARATO CONSTA DE UNA UNIDAD DE PROCESO PRINCIPAL PROGRAMABLE CONECTADA OPERATIVAMENTE A LA UNIDAD DE PROCESO DEL MANIPULADOR Y A UN ACTUADOR DE LA PRENSA PARA EL ENSAMBLAJE DE TROQUEL DE LA PRENSA . UNA MEMORIA DE LA UNIDAD DE PROCESO PRINCIPAL ESTA PROVISTA DE MEDIOS DE PROGRAMACION PARA EL CALCULO DE LAS COORDINADAS DE MOVIMIENTO DEL PUNTO DE SUJECION (P) PARA LA LAMINA DE METAL (L) COMO FUNCION DE UNA SEÑAL DE CONTROL SUMINISTRADA POR UN GENERADOR DE SEÑAL CONECTADO A LA PARTE ARTICULADA DEL ENSAMBLAJE DE TROQUEL DE CURVAR ; LAS COORDINADAS DE MOVIMIENTO…
AUTOMATAS DE CATEGORIZACION QUE EMPLEAN SELECCION DE GRUPOS NEURONALES CON REENTRADA.
(01/04/2001). Solicitante/s: NEUROSCIENCES RESEARCH FOUNDATION, INC. Inventor/es: EDELMAN, GERALD, M., REEKE, GEORGE, N., JR.
UN APARATO CAPAZ DE DETECTAR LA PRESENCIA DE OBJETOS EN SU ENTORNO, DE CATEGORIZAR ESTOS OBJETOS SIN UNA DESCRIPCION PREVIA DE LAS CATEGORIAS A SER ESPERADAS Y DE CONTROLAR LOS MECANISMOS EFECTORES ROBOTICOS PARA RESPONDER DIFERENCIALMENTE A TALES OBJETOS SEGUN SUS CATEGORIAS. TALES RESPUESTAS INCLUYEN LA CLASIFICACION DE OBJETOS, EL RECHAZO DE CIERTO TIPO DE OBJETOS Y LA DETECCION DE NUEVOS OBJETOS O DE OBJETOS DESVIADOS. LA INVENCION INCLUYE UN DISPOSITIVO LLAMADO UN "N-DRUPLE DE CLASIFIACION" (DEL QUE UN "PAR DE CLASIFICACION" ES UN CASO ESPECIAL) CAPAZ DE COMBINAR SEÑALES DESDE DOS O MAS MODALIDADES SENSORAS PARA LLEVAR A LA CLASIFICACION DE UN OBJETO.
(16/11/2000). Solicitante/s: MICHAEL, JOSEPH. Inventor/es: MICHAEL, JOSEPH.
UN MATERIAL PROGRAMABLE ES UNA COLECCION DE BLOQUES CON FORMA FUNDAMENTALMENTE CUBICA, LLAMADOS MONOMEROS, QUE SE MUEVEN UNOS RESPECTO A OTROS BAJO EL CONTROL DE UN ORDENADOR, PARA ESCULPIR ESTRUCTURAS DE INGENIERIA Y MECANISMOS (MAQUINA PARA ANDAR), COMO SE ILUSTRA EN LA FIGURA. LOS MONOMEROS TIENEN CARACTERISTICAS DE ADHESION A OTROS MONOMEROS Y DE DESLIZAMIENTO CON RESPECTO A OTROS MONOMEROS, SIN SEPARARSE. LOS MONOMEROS SON TOLERANTES A LOS DEFECTOS CONTRA DAÑOS; LOS MONOMEROS FUNCIONALES MUEVEN A LOS MONOMEROS DEFECTUOSOS Y LOS SUSTITUYEN POR CLONES QUE FUNCIONAN. EL MOVIMIENTO DE LOS MONOMEROS SE DESGLOSA SISTEMATICAMENTE EN METODOS DE HILERAS, PUERTOS, AUTOPISTAS Y DEPOSITOS PARA OBTENER VIAS INDIVIDUALES DE MOVIMIENTO DE MONOMEROS, NECESARIAS PARA SINTETIZAR UNA ESTRUCTURA. LOS MONOMEROS ESPECIALIZADOS PUEDEN PORTAR HERRAMIENTAS QUE, JUNTO CON LA SINTESIS DE ESTRUCTURAS A MEDIDA, PUEDEN CREAR MAQUINAS A MEDIDA.
PROCEDIMIENTO PARA DETERMINAR LA POSICION DE UN CUERPO EN EL ESPACIO.
(01/07/2000) EN UN PROCEDIMIENTO PARA LA DETERMINACION DE LA POSICION DE UN CUERPO EN EL ESPACIO, PARA LA REALIZACION DE MANIPULACIONES EN EL, SE PROPONE PARA LA OBTENCION DEL OBJETIVO, UN ELEMENTO A SER MANIPULADO CON REFERENCIA A APLICACION DIRECTA POR EL MANIPULADOR, DE TAL MODO QUE DISPONE DE MULTIPLES CAMARAS ELECTRONICAS SEPARADAS ESPACIALMENTE CON PROCESADO DE IMAGEN MEDIANTE MEDICIONES EN UNA TABLA DE CALIBRACION COORDINADA CON MUESTRAS DE PUNTEO, CUYAS IMAGENES ASI COMO LA MUESTRA DE PUNTOS SE PROCESAN PARA LA DETERMINACION DE LA POSICION DE ACUERDO CON CAMARAS INDIVIDUALES COLOCADAS EN EL ESPACIO Y ALMACENANDOSE SU POSICION, DE TAL MODO QUE SE CONSIGUE…
METODO Y APARATO PARA EMPAQUETAR PRODUCTOS AGRICOLAS Y HORTICOLAS.
(16/09/1999). Solicitante/s: DE GREEF'S WAGEN- CARROSSERIE- EN MACHINEBOUW B.V.. Inventor/es: DE GREEF, JACOB HENDRIK.
EL EMPAQUETAMIENTO DE PRODUCTOS AGRICOLAS Y HORTICOLAS REQUIERE MUCHO TRABAJO MANUAL, PARTICULARMENTE CUANDO LOS TALLOS DE FRUTAS TALES COMO MANZANAS SE HACEN APUNTAR TODOS EN LA MISMA DIRECCION Y/O CUANDO EL LADO COLOREADO DE FORMA MAS ATRACTIVA SE PRESENTA DE MANERA APROPIADA. LA INVENCION SE REFIERE Y SUMINISTRA UN METODO QUE PUEDE REALIZARSE AUTOMATICAMENTE, QUE SE CARACTERIZA POR QUE POR MEDIO DE AL MENOS UNA CAMARA SE GRABAN IMAGENES DE LOS PRODUCTOS Y POR QUE LOS PRODUCTOS SON EMPAQUETADOS DE ACUERDO CON LAS IMAGENES GRABADAS.
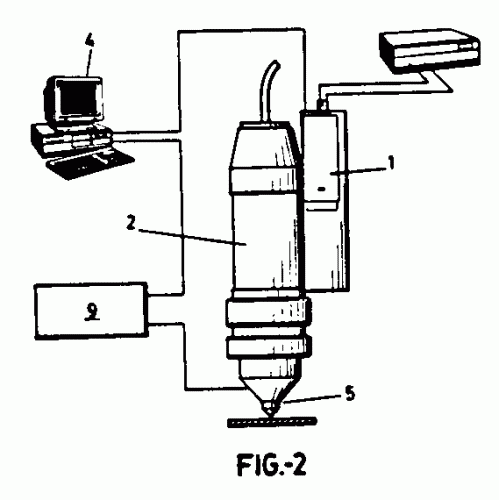
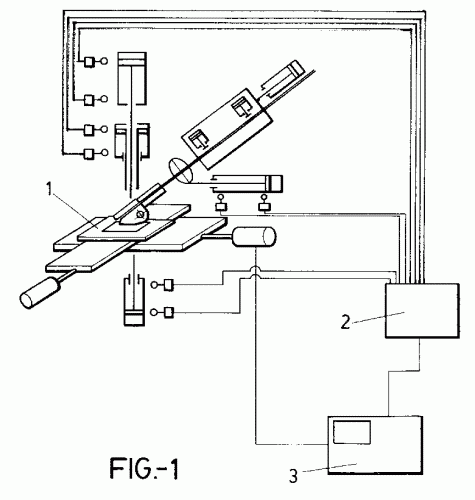
DISPOSITIVO PERFECCIONADO PARA FACILITAR LAS OPERACIONES DE PROGRAMACION DE ROBOTS.
(01/08/1999). Ver ilustración. Solicitante/s: CENTRO TECNOLOGICO ROBOTIKER. Inventor/es: DORRONSORO MINDIGUREN, MIGUEL.
DISPOSITIVO PERFECCIONADO PARA FACILITAR LAS OPERACIONES DE PROGRAMACION DE ROBOTS. EL SISTEMA ES DE APLICACION EN ROBOTS PARA TRABAJOS DE ACABADO DE PIEZAS MEDIANTE LASER Y ESTA COMPUESTO POR UNA CAMARA CCD Y UN SISTEMA DE ILUMINACION MONTADOS DE FORMA PERMANENTE A LA ANTORCHA DE FOCALIZACION ACOPLADA AL BRAZO DEL ROBOT, DISPONIENDOSE LA CAMARA PARALELAMENTE A LA ANTORCHA, MIENTRAS QUE EL SISTEMA DE ILUMINACION, SE DISPONE PERPENDICULARMENTE A LA CITADA CAMARA, DEBIENDO, POR ELLO, MONTARSE UN DIVISOR DE HAZ, ASI COMO ESPEJOS Y LENTES, CONVENIENTEMENTE ORIENTADOS PARA QUE LA LUZ EMITIDA POR EL SISTEMA DE ILUMINACION PASE POR LA BOQUILLA DE LA ANTORCHA ILUMINANDO LA ZONA DE TRABAJO Y RECONDUCIENDO LA IMAGEN HASTA LA CAMARA A TRAVES DE LA PROPIA OPTICA DEL LASER DEL ROBOT. FIGURA 2.
ROBOT AUTONOMO, MOVIL, CON ALTA CAPACIDAD SENSORIAL Y DE PROCESO PARA TRABAJOS COOPERATIVOS.
(16/10/1998). Solicitante/s: UNIVERSIDAD COMPLUTENSE DE MADRID. Inventor/es: MURCIANO CESPEDOSA, ANTONIO, GIRON SIERRA, JOSE MARIA, ZAMORA ROMERO, JAVIER, REVILLAGO EIROS, MARIO, DE LA PAZ LOPEZ, FELIX, MILLAN RUIZ, JOSE DEL ROCIO.
ROBOT AUTONOMO, MOVIL, COOPERATIVO QUE INCLUYE COMUNICACION OMNIDIRECCIONAL RESPECTO A OTROS AGENTES VECINOS; RECEPCION DE MENSAJES DE OTROS AGENTES, DETECTANDO ADEMAS LA DIRECCION DEL AGENTE EMISOR; COMUNICACION GLOBAL DE CADA AGENTE RESPECTO A TODOS LOS AGENTES, Y A LA BASE; DETECCION DE OBJETOS ACARREABLES Y DE OBSTACULOS, DISTINGUIENDO SI ES UNO U OTRO CASO, Y DETERMINANDO LA DIRECCION DONDE SE LOCALIZA; DETECCION DE OTROS AGENTES; DETECCION DE CHOQUES; GEOMETRIA CIRCULAR PARA MINIMIZAR EFECTOS DE CHOQUES; CONTROL DE LA VELOCIDAD Y DE LOS GIROS EN SUS DESPLAZAMIENTOS: CAPTURA Y ACARREO DE OBJETOS, CON GASTO MINIMO DE ENERGIA; DEPOSICION DE OBJETOS EN UN ALMACEN, CUYO SITIO ES CAPAZ DE RECONOCER; AUTOCONCIENCIA DE RANGOS DE DETECCION SENSORIAL, Y DE EDAD ENERGETICA; CONDUCTAS EXPLORATORIAS, ASOCIADAS AL MANEJO DE SENSORES: PROTOCOLOS DE COMUNICACION EN AMBIENTES COOPERATIVOS.
PROCESO DE GENERACION DE TRAYECTORIA PARA UN SISTEMA ROBOTIZADO.
(16/01/1997). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: SGARBI, FREDERIC, CAMMOUN, RIADH.
PROCESO DE GENERACION DE TRAYECTORIA PARA UN SISTEMA ROBOTIZADO QUE COMPRENDE AL MENOS UN ORGANO QUE PERMITE VARIAR EN TIEMPO REAL LA VELOCIDAD DE MOVIMIENTO. EL PROCESO CONSISTE EN ELEGIR UN MOVIMIENTO PRINCIPAL, POR EJEMPLO EL MOVIMIENTO DE TRANSLACION DEL ORGANO, POR EL QUE TODOS LOS OTROS SON CONTROLADOS. EL MOVIMIENTO PRINCIPAL SE LLEVA A CABO SOBRE LA TRAYECTORIA DESCOMPUESTA EN TROZOS A UNA VELOCIDAD QUE ASEGURA LA POSIBILIDAD DE DETENER EL ORGANO AL FINAL DEL TROZO QUE SIGUE EL QUE ES RECORRIDO. LOS MOVIMIENTO CONTROLADOS SON RECORRIDOS TANTAS VECES COMO ES POSIBLE EN SINCRONIZACION CON EL MOVIMIENTO PRINCIPAL. LA INVENCION PUEDE APLICARSE POR EJEMPLO AL DESBARBADO AUTOMATICO DE PIEZAS DE FORMA COMPLEJA. SE PUEDEN CONCEBIR SISTEMAS ROBOTIZADOS FORMADOS POR VARIOS SOLIDOS MOVILES INDEPENDIENTEMENTE Y COORDENADOS POR EL PROCESO, O INCLUSO VARIAS ORDENES DE CONTROL.
ROBOT DESPLAZABLE SOBRE PUESTOS DE TRABAJO FIJOS O MOVILES.
(01/02/1996). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: DETRICHE, JEAN-MARIE.
LA INVENCION SE REFIERE A UN ROBOT MANEJABLE A PARTIR DE UN PUESTO DE TRABAJO FIJO O MOVIL, SIENDO ESTE ROBOT DESPLAZABLE, AL MENOS EN PARTE, DESDE EL PUESTO DE TRABAJO MOVIL SOBRE EL PUESTO DE TRABAJO FIJO , O VICEVERSA. EL ROBOT ESTA CONTROLADO POR EL USUARIO MEDIANTE UNA INTERFASE ROBOT/USUARIO UNIDA A MEDIOS DE EMISION/RECEPCION (13 Y 22) QUE ASEGURAN LA COMUNICACION DE INFORMACIONES ENTRE LOS DOS PUESTOS DE TRABAJO. SEGUN UNA VARIANTE DE LA INVENCION, EL ROBOT COMPRENDE UN ACOPLADOR QUE PERMITE ESTABLECER A LA VEZ CONEXIONES MECANICAS Y CONEXIONES ELECTRICAS ENTRE UNO DE LOS PUESTOS DE TRABAJO Y EL ROBOT. SEGUN OTRA VARIANTE DE LA INVENCION, EL ROBOT COMPRENDE UN MEDIO PORTADOR POSICIONADO PERMANENTEMENTE SOBRE UN PUESTO DE TRABAJO Y UN MEDIO MANIPULADOR QUE PUEDE SER DESPLAZADO DE UN MEDIO PORTADOR A OTRO MEDIO PORTADOR. LA INVENCION SE APLICA DE MANERA PARTICULAR AL CAMPO DE LA ROBOTICA DE AYUDA A LOS INVALIDOS, SIENDO ENTONCES EL PUESTO MOVIL UNA SILLA DE RUEDAS ELECTRICA.
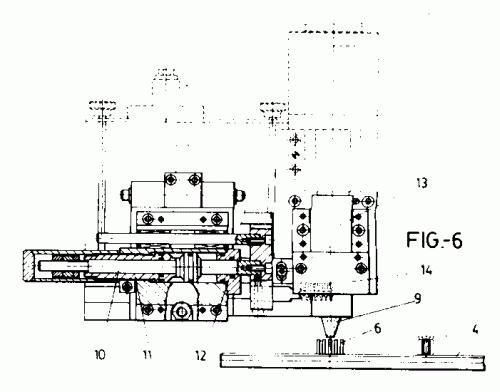
CABEZAL AUTOMATICO PARA LA INSERCION DE LENGUETAS EN PLACAS DE CIRCUITO IMPRESO.
(01/03/1992). Ver ilustración. Solicitante/s: CONSTRUCCIONES MECANICAS JOSE LAZPIUR S.A.. Inventor/es: LAZPIUR LAMARIANO,MIGUEL.
A PARTIR DE LA PROGRAMACION DE UN AUTOMATA, CONECTADO DIRECTAMENTE CON UN MECANISMO DE CONTROL QUE ACTUA SOBRE UNA MESA DE COORDENADAS SOBRE LA QUE SE DISPONE UNA PLACA DE CIRCUITO IMPRESO, SOBRE LA QUE EXISTE UN CABEZAL MUTIDIRECCIONAL, QUE SE ENCUENTRA CONECTADO CON UN MECANISMO DE AVANCE DE LENGUETAS, LAS CUALES SON A CONTINUACION CORTADAS DE SU ROSARIO POR LA ACTUACION DE UN DISPOSITIVO DE CORTE, Y POSTERIORMENTE INSERTADAS SOBRE LA PLACA DE FORMA TOTALMENTE AUTOMATICA.
CABEZAL AUTOMATICO PARA LA INSERCION DE PATILLAS EN PLACAS DE CIRCUITO IMPRESO.
(16/02/1992). Ver ilustración. Solicitante/s: CONSTRUCCIONES MECANICAS JOSE LAZPIUR S.A.. Inventor/es: LAZPIUR LAMARIANO,MIGUEL.
CABEZAL AUTOMATICO PARA LA INSERCION DE PATILLA EN PLACAS DE CIRCUITO IMPRESO MEDIANTE LA UTILIZACION DE UN CONJUNTO CONFIGURADO A PARTIR DE UNA MESA DE COORDENADAS CONECTADA DIRECTAMENTE CON UN AUTOMATA PROGRAMABLE Y SU CORRESPONDIENTE CONTROL NUMERICO, SE UTILIZA UN DISPOSITIVO DE ALIMENTACION A UN CABEZAL AUTOMATICO DOTADO DE MECANISMOS DE CORTE Y DIMENSIONADO OPORTUNO, EN CUYO INTERIOR SE EFECTUA LA FUNCION DE CORTE POSICIONADO Y ACERCAMIENTO Y POSTERIOR INSERCION DE LA PATILLA EN LA PLACA.
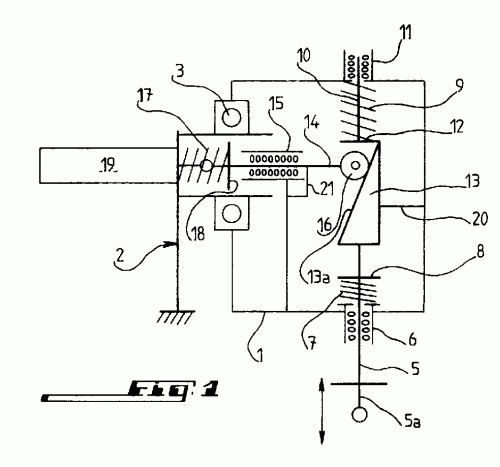
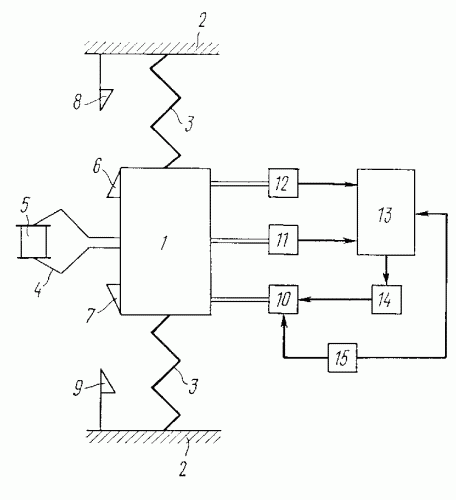
UN METODO DE CONTROL DE UNA MANO MECANICA DE RESONANCIA.
(01/04/1990). Ver ilustración. Solicitante/s: INSTITUT MASHINOVEDENIA IMENI A.A. Inventor/es: SAMUILOVICH AKINFIEV, TEODOR.
UN METODO DE CONTROL DE UNA MANO MECANICA DE RESONANCIA CONSISTE EN DESBLOQUEAR LA MANO EN LA POSICION INICIAL, DESPLAZAR LA MANO HACIA UNA POSICION ASIGNADA, Y FIJAR LA MANO EN LA POSICION ASIGNADA. DURANTE EL MOVIMIENTO DE LA MANO HACIA LA POSICION ASIGNADA, LA TRAYECTORIA SE DIVIDE EN EL TRAMO DE REGISTRO DE PARAMETROS DE MOVIMIENTO Y EN EL TRAMO DE CORRECCION DE LA LEY DE MOVIMIENTO. DURANTE EL MOVIMIENTO DE LA MANO EN EL TRAMO DE REGISTRO DE PARAMETROS DE MOVIMIENTO SE ALIMENTA LA TENSION DE REFERENCIA AL MOTOR, SE MIDE Y SE REGISTRA LA VELOCIDAD Y LA COORDENADA. DURANTE EL MOVIMIENTO DE LA MANO EN EL TRAMO DE CORRECCION, SE CALCULA LA DIFERENCIA ENTRE LAS VELOCIDADES EN ESTOS TRAMOS. LUEGO, SE GENERA UNA TENSION ADICIONAL QUE ES FUNCION DE LA DIFERENCIA CALCULADA DE LAS VELOCIDADES. SE ALIMENTA AL MOTOR UNA TENSION EN FORMA DE SUMA ALGEBRAICA DE LA TENSION DE REFERENCIA Y DE LA TENSION ADICIONAL.
UN SISTEMA DE CONTROL PARA ROBOTS INDUSTRIALES.
(01/04/1986). Solicitante/s: IKERLAN, S. COOP..
SISTEMA DE CONTROL PARA ROBOTS INDUSTRIALES. CONSTA DE UNA UNIDAD SUPERIOR (US), QUE COMPRENDE UN MICROPROCESADOR EN PARALELO CON UN COPROCESADOR ARITMETICO, LA CUAL CALCULA LAS TRAYECTORIAS A PARTIR DE LOS PUNTOS PROGRAMADOS, EFECTUA LA TRANSFORMACION DE COORDENADAS Y LA COMUNICACION SERIE CON UNA UNIDAD MANUAL DE PROGRAMACION (UMP) Y UNA UNIDAD DE ALMACENAMIENTO DE DATOS (UAD). PARA ESTAS OPERACIONES SE DISPONE DE LOS CIRCUITOS PERIFERICOS NECESARIOS Y SE DISPONE DE UN BUS LOCAL PARA PODER CONECTAR TARJETAS DE ENTRADA-SALIDA.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}