CIP-2021 : B25J 9/16 : Controles por programa (control total de una fábrica, es decir,
control centralizado de varias máquinas, G05B 19/418).
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/16[1] › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/16 · Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
CIP2021: Invenciones publicadas en esta sección.
Célula robotizada, instalación y método para eliminar rebabas de piezas.
(08/02/2017) Una célula robotizada para eliminar rebabas o excesos de material en piezas de gran tamaño con al menos una superficie curva, que comprende una base y un robot de al menos 6 ejes de libertad,
en la que el robot comprende medios de conexión para, en funcionamiento, llevar instalados un útil de esmerilado y un sistema de escaneo ,
y en la que dicho útil de esmerilado comprende a su vez un sistema de control configurado para controlar la fuerza de contacto ejercida sobre la pieza a rebabar y un electromandrino configurado para incorporar y, en uso, hacer girar un elemento abrasivo ,
de forma que el robot está configurado para, en funcionamiento y con respecto a una trayectoria teórica previamente programada, poder adaptar su…
Método y sistema para la determinación de al menos una propiedad de una articulación.
(08/02/2017) Método para determinar al menos una propiedad de una articulación, tal como una articulación de un manipulador , donde dicha articulación está configurada para que al menos un actuador la impulse, estando el actuador configurado para impulsar dicha articulación mediante un tren de potencia y un controlador configurado para controlar el movimiento de esta articulación , donde el método comprende:
- fijación de dicha articulación de modo que el movimiento de la articulación quede restringido; caracterizado por el hecho de que el método además comprende:
- accionamiento de dicho tren de potencia mientras se monitoriza al menos una magnitud asociada con un par de dicho actuador y al menos una magnitud asociada con la posición del actuador detectada por un sensor del ángulo del motor, de modo que…
Método de control de una máquina con actuación redundante paralela, dispositivo de control asociado y máquina.
(01/02/2017) Un método para controlar una máquina que comprende:
- un marco ,
- un elemento móvil accionado en relación con dicho marco a lo largo de un cierto número de grados de libertad por una pluralidad de transmisiones mecánicas , cuyo número es estrictamente mayor que el número de grados de libertad de dicho elemento móvil, estando dichas transmisiones mecánicas paralelas entre sí y accionadas cada una por al menos un accionador que comprende:
* un cuerpo fijado a dicho marco,
* un miembro para accionar una transmisión mecánica ,
* un sensor de posición diseñado para producir una señal, llamada señal de posición medida, que…
Dispositivo y método para medir la ubicación de un vehículo submarino.
(18/01/2017). Solicitante/s: SAMSUNG HEAVY IND. CO. LTD. Inventor/es: LEE,JAEYONG, BAEK,SANGHOON, CHOI,YUNKYU, PARK,YOUNGJUN, EUN,JONGHO.
Un aparato para medir la ubicación de un vehículo submarino, que comprende:
una unidad generadora de información del casco que divide una superficie del casco en una pluralidad de áreas y que genera información del vector normal para cada información del área y del nivel que es la información de una profundidad a la que cada área se sumerge en el agua;
una unidad receptora de información del vehículo que recibe información de la orientación e información de la profundidad de un vehículo unido a la superficie del casco; y
una unidad de determinación de la ubicación que compara la información de la orientación del vehículo con la información del vector normal del área y que compara la información de la profundidad del vehículo con la información del nivel del área para determinar la ubicación del vehículo.
PDF original: ES-2621297_T3.pdf
Procedimiento y sistema para el control de piezas constructivas y/o unidades funcionales con un dispositivo de inspección.
(04/01/2017) Procedimiento para el control de piezas constructivas y/o unidades funcionales con un dispositivo de inspección a través de tareas de inspección definidas, creándose cada pieza constructiva y/o cada unidad funcional por medio de un sistema CAD y definiéndose, durante la creación de una pieza constructiva y/o de una unidad funcional en el sistema CAD, una tarea de inspección asociada a la pieza constructiva y/o a la unidad funcional , estando asociadas a cada tarea de inspección características de calidad,
caracterizado porque la tarea de inspección se define en un espacio funcional virtual,
porque, debido a la tarea de inspección, para un dispositivo de inspección que ejecuta la tarea de inspección…
Sistema y procedimiento para la alineación de un marco de referencia de una máquina de movimiento por coordenadas con un marco de referencia de un sistema de medición.
(02/11/2016) Un procedimiento para la alineación de un marco de referencia de la herramienta de una máquina de movimiento por coordenadas con un marco de referencia del sistema de medición, el procedimiento comprendiendo:
la aplicación de por lo menos dos movimientos lineales de la máquina a una herramienta de la máquina en una máquina de movimiento por coordenadas, en el que cada movimiento lineal de la máquina es a partir de una posición cero de la herramienta de la máquina en un marco de referencia de la máquina de movimiento por coordenadas inicial y los por lo menos dos movimientos lineales de la máquina no son co- lineales;
la medición de por lo menos dos movimientos lineal de la cámara de una cámara montada en una máquina de movimiento por coordenadas para el movimiento con la herramienta de la máquina utilizando una cámara y un procesador…
Localización del centro de herramienta y de la orientación de una sonda acústica en un marco de referencia, por método ultrasónico.
(02/11/2016) Procedimiento para realizar la localización en posición y orientación de una herramienta que comprende una sonda acústica sintética montada en el brazo manipulador de un robot, estando definido el plano de la citada sonda acústica por dos ejes X e Y perpendiculares, siendo realizada la citada localización en un marco de referencia conocido del citado robot, caracterizado por que el mismo comprende las etapas siguientes:
- una primera etapa durante la cual se determina, por medio de la sonda acústica , la distancia entre la sonda acústica y un punto de la superficie de un objetivo puntual de referencia que ocupa una posición fija, siendo determinada esta distancia para tres posiciones diferentes de la sonda acústica con respecto al objetivo , siendo deducida geométricamente de las mediciones efectuadas…
Plataforma de simulación para la validación de una arquitectura lógica y física de un robot.
(12/10/2016) Plataforma de simulación para la validación de un dispositivo que presenta un computador programado para ejecutar un algoritmo , dicho dispositivo está previsto para ser instalado a bordo de un robot y conectado a un sensor del robot para recibir una señal de medida y a un automatismo del robot para transmitirle una señal de mando, la plataforma está prevista para ser conectada el computador y presenta un medio de cálculo adecuado para ejecutar las instrucciones de un programa de simulación que consta de:
- un módulo de configuración de un entorno en tres dimensiones , para crear un entorno virtual en tres dimensiones;
- un módulo de simulación de una respuesta del sensor del robot , diseñado para generar datos de salida que correspondan a señales de medida…
EQUIPO ROBOTIZADO PARA LA LOCALIZACIÓN DE ARTÍCULOS EN UNA TIENDA Y SU PROCEDIMIENTO DE FUNCIONAMIENTO.
(10/10/2016). Solicitante/s: Tier1 Technology, S.L. Inventor/es: BORDONS ALBA,CARLOS, FERNANDEZ CAMACHO,EDUARDO, RIDAO CARLINI,Miguel Ángel, HERNÁNDEZ RODRÍGUEZ,Gonzalo, RUBIO GONZÁLEZ, Francisco Javier, CORDERO AMARILLO,José Luis.
Equipo robotizado para la localización de artículos en una tienda y su procedimiento de funcionamiento.
Equipo robotizado para la localización de artículos en coordenadas XYZ en una tienda que consta de un robot móvil y puede comprender opcionalmente un ordenador externo conectado por vía inalámbrica con el robot , que a su vez está formado por un sistema de visión artificial , un sistema de barrido y detección de obstáculos , un sistema de lectura de etiquetas activas con señales ópticas y/o electromagnéticas , un sistema de desplazamiento formado por al menos dos ruedas motrices, una batería y un controlador que comprende una placa principal con un sistema operativo de código abierto, estando conectado dicho controlador con los diferentes sistemas que conforman el robot y estando configurado para recibir datos de dichos sistemas y procesarlos con objeto de crear un mapa de la tienda y determinar la ubicación de cada artículo en la tienda.
PDF original: ES-2585977_B1.pdf
PDF original: ES-2585977_A1.pdf
Sistema de pulimiento automatizado.
(05/10/2016) Un método que comprende:
realizar un primer tipo de operación en una serie de características de superficie sobre una superficie de un objeto que utiliza un primer efector de extremo;
generar datos de láser de retroalimentación alrededor de una serie de características de superficie después de que se ha realizado el primer tipo operación utilizando un dispositivo láser; y
realizar un segundo tipo de operación sobre una serie de características de superficie utilizando un segundo efector de extremo y los datos de láser de retroalimentación para reelaborar la serie de características …
Método y sistema para determinar al menos una propiedad de un manipulador.
(06/07/2016) Método para determinar al menos una propiedad de adaptabilidad asociada a un eje seleccionado de un manipulador , donde dicho manipulador se configura para ser accionado por un controlador , y comprende al menos un eje que comprende una conexión y un enlace conectado a dicha conexión, donde la conexión está configurada para ser accionada vía un tren de transmisión por par proveniente de un accionador, el método comprende:
- fijar una parte móvil del manipulador a un punto en el espacio controlando el manipulador de manera que el manipulador logre una configuración cinemática fijada;
- seleccionar un conjunto…
Conjunto para el diagnóstico de un dispositivo con piezas móviles.
(29/06/2016) Conjunto para el diagnóstico de un dispositivo con piezas móviles que comprende un equipo de tratamiento de datos con un ordenador y al menos un dispositivo , especialmente un robot industrial, con un sistema de control , presentando el dispositivo piezas móviles que se fijan de forma articulada en puntos de sujeción de un cuerpo base fijo o en otras piezas móviles , previéndose al menos un sistema de sensores de transmisión inalámbrica que se fija en el respectivo punto de sujeción o en la propia pieza móvil y que registra los datos físicos de la respectiva pieza móvil y los transmite…
Método de corrección de la posición y desviación de una aguja de una jeringa en una máquina para la preparación automática de medicación intravenosa.
(30/05/2016). Solicitante/s: GRIFOLS ENGINEERING, S.A. Inventor/es: RUBIO AGUILERA,Javier, CASANOVA MONTPEYÓ,Oriol.
Método de corrección de la posición y desviación de una aguja de una jeringa en una máquina para la preparación automática de medicación intravenosa, comprendiendo la máquina un actuador automático, con sistema de control, en el que queda colocada la jeringa y un sensor de posición unidimensional que comprende un plano de medición, comprendiendo el método etapas de obtención de coordenadas de posición, mediante el sensor de posición, de un primer y un segundo punto de la aguja, y etapas de corrección, por parte del sistema de control del actuador automático, del error de posición y desviación de la aguja.
PDF original: ES-2572163_A1.pdf
PDF original: ES-2572163_B1.pdf
Aparato de mano y procedimiento para controlar y/o programar un manipulador.
(25/05/2016). Solicitante/s: KUKA ROBOTER GMBH. Inventor/es: SEDLMAYR,ANDREAS.
Aparato de mano portátil para controlar y/o programar un manipulador, especialmente un robot, con un dispositivo de manipulación para la manipulación del aparato de mano por un usuario;
un elemento palpador en el que está definido un punto de referencia (R);
un dispositivo de registro de posición , unido al elemento palpador, especialmente de forma separable, para registrar una posición (x, y, z, α, β, γ) del punto de referencia;
caracterizado por que
el dispositivo de manipulación y el dispositivo de registro de posición están unidos entre sí de forma articulada, y
el aparato de mano presenta un dispositivo de registro de fuerza para registrar una fuerza de reacción (F) que actúa sobre el elemento palpador.
PDF original: ES-2580833_T3.pdf
Robot programable e interfaz de usuario.
(11/05/2016) Un sistema del robot programable que comprende:
(a) un robot que comprende varias secciones del brazo individuales, donde las secciones adyacentes están interconectadas mediante una articulación;
(b) medio de accionamiento controlable proporcionado en al menos alguna de dichas articulaciones, que acciona dichas articulaciones;
(c) un sistema de control para controlar dicho medio de accionamiento,
(d) medio de la interfaz de usuario que comprende medios para programar el sistema del robot, siendo dichos medios proporcionados externamente al robot, como un mando a distancia; y
(e) medios de almacenamiento que cooperan…
Robot industrial y procedimiento de control de un robot industrial.
(11/05/2016) Un robot industrial que comprende:
- un manipulador con un número de grados de libertad (A1-A6), que tiene una estructura mecánica que comprende una pluralidad de partes móviles, entre las cuales un efector de extremo y una o más articulaciones de conexión accionadas por motores (11'-14') eléctricos con correspondientes transductores (S) de posición asociados;
- una unidad de control del manipulador , que comprende medios de selección operables por un usuario para la selección de una pluralidad de posibles modos de operación del robot , entre los cuales al menos un modo de operación automático;
- un primer sistema de detección, para detectar la posible presencia de un cuerpo extraño (HO) en un área de trabajo predefinida del manipulador , en particular, un ser humano;
- un segundo…
Procedimiento operativo para un sistema de posicionamiento.
(16/03/2016) Procedimiento operativo para un sistema de posicionamiento , especialmente para el montaje de la estructura de aeronaves, comprendiendo el sistema de posicionamiento varios posicionadores (2a, 2b, 2c) que presentan respectivamente al menos un manipulador (M), en el que:
- un componente (B) se recoge por medio de los manipuladores (M) y
- el componente (B) se manipula por medio de los manipuladores (M) de forma sincronizada mientras que los manipuladores (M) lo sostienen conjuntamente, caracterizado por que
- a cada manipulador (M) se le asigna el respectivo sistema de coordenadas básicas,
- por que la posición y la orientación del componente (B) se determinan o se han determinado en la posición de partida y
- la posición y la orientación del componente…
Procedimiento para montar piezas constructivas mediante un robot industrial.
(02/03/2016) Procedimiento para montar una pieza constructiva , que presenta un tramo de introducción y un tramo de sujeción , en una abertura de una pieza de trabajo mediante un robot industrial , que presenta un efector terminal que conduce la pieza constructiva en el tramo de sujeción , con las siguientes etapas:
- aproximar (S1) el tramo de introducción de la pieza constructiva a la abertura mediante el movimiento del robot industrial ;
- aumentar fuerzas de proceso (S2) mediante el robot industrial tras un contacto del tramo de introducción de la pieza constructiva con la pieza de trabajo hasta alcanzar un umbral de fuerza de proceso (P), almacenándose…
Sistema de almacenamiento y preparación de pedidos para la identificación y preparación de pedidos completamente automatizada de artículos, y puesto de preparación de pedidos correspondiente.
(17/02/2016) Sistema de almacenamiento y preparación de pedidos para la preparación de pedidos completamente automatizada de artículos que se almacenan en medios auxiliares de carga de almacén y que se preparan asociados a un pedido, con:
un almacén de artículos;
una primera tecnología de transporte, que transporta los medios auxiliares de carga de almacén extraídos del almacén de artículos a un puesto de preparación de pedidos que funciona sin operarios;
una unidad de agarre completamente automática en el puesto de preparación de pedidos, que toma los artículos que han de prepararse para el pedido de los medios auxiliares de…
Procedimiento para el accionamiento de un dispositivo de rectificado con cinta.
(20/01/2016) Procedimiento para el accionamiento de un dispositivo 10 de rectificado con cinta, con una máquina de rectificado con cinta con al menos una cinta de rectificado , cerrada en sí misma y guiada alrededor de al menos un rodillo de contacto y un rodillo de accionamiento , con un aparato de manipulación , el cual sostiene a la pieza a rectificar mediante un efector terminal , y la desplaza a lo largo de una trayectoria predeterminada y programada del movimiento, con un órgano de medición de fuerza para medir la fuerza (F) con la que la pieza se apoya sobre la cinta de rectificado , con un accionamiento de ajuste para mover el rodillo de contacto y el efector terminal uno hacia el otro, y uno separándose del otro en la dirección (R), así como un sensor de posición para determinar la posición (P) del accionamiento de ajuste , caracterizado…
Ensamblaje de una pieza de trabajo con una soldadura de ensamblaje escondida.
(18/01/2016) Procedimiento para el ensamblaje de piezas de trabajo tapadas mediante un rayo de energía , en el que
a) al menos una pieza inferior de pieza de trabajo y al menos una pieza superior de pieza de trabajo se posicionan una respecto a otra;
b) en el estado posicionado, la al menos una pieza superior de pieza de trabajo está en contacto con la al menos una pieza inferior de pieza de trabajo a lo largo de un contorno de ensamblaje de la al menos una pieza inferior de pieza de trabajo tapando el contorno de ensamblaje , cuya extensión teórica es conocida por un control con respecto a un sistema de coordenadas;
c) el rayo…
Dispositivo y procedimiento para la generación asistida por ordenador de una línea de manipuladores.
(06/01/2016) Procedimiento para la generación asistida por ordenador de una trayectoria de manipulador con los siguientes pasos:
- puesta a disposición y carga (S30) de una herramienta virtual ;
- generación (S40) de una trayectoria de herramienta virtual a base de un componente virtual y de la herramienta virtual cargada;
- puesta a disposición y carga (S50) de una cinemática de manipulador virtual ;
- puesta a disposición y carga (S50) de un sistema de control de manipuladores virtual;
- generación (S60) de una trayectoria de manipulador virtual a base de la trayectoria de herramienta virtual y de la cinemática de manipulador virtual;
- edición (S70) de valores de proceso de un proceso de manipulador virtual después de la generación de la…
Plataforma móvil holonómica elástica en serie para la rehabilitación de las extremidades superiores.
(30/12/2015) Una plataforma móvil holonómica elástica en serie para la administración en el hogar de ejercicios de rehabilitación física terapéuticos de sobremesa para pacientes y la evaluación del rendimiento del paciente durante estos ejercicios, proporcionándose dicha plataforma móvil como una plataforma móvil de múltiples grados de libertad (DoF) que comprende un mecanismo compatible con múltiples DoF y una unidad de control en la que dicha plataforma móvil de múltiples DoF comprende al menos tres ruedas Mecanum accionadas y dicho mecanismo compatible con múltiples DoF se proporciona como una unidad de detección de fuerza en forma de un elemento elástico plano compatible con múltiples DoF en serie,
en la que dicho mecanismo compatible opera de tal manera que las fuerzas en el plano y la torsión que actúan se determinan…
Procedimiento y dispositivo para el control de un manipulador.
(25/11/2015) Procedimiento para el control de un manipulador, especialmente de un robot, con el paso:
registro de una fuerza de contacto entre el manipulador y una pieza de trabajo en base a fuerzas de accionamiento reales (π) y fuerzas de accionamiento (πModelo) de un modelo dinámico (M d2q/dt2 + h(q, dq/dt) ≥ πModelo) del manipulador que describe la relación entre magnitudes cinemáticas y fuerzas de accionamiento;
caracterizado por el paso: ensamblaje de una pieza de trabajo bajo regulación flexible (S130; S230), supervisándose un estado de ensamblaje de la pieza de trabajo ensamblada bajo deformación elástica o plástica en base a…
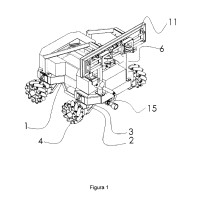
MÁQUINA ROBOTIZADA Y/O TELECOMANDADA PARA RETIRO E INSERCIÓN DE EQUIPOS SWITCHGEAR, COMPRENDE CHASIS; RUEDAS; SOPORTE; ESTRUCTURA; CÁMARA; Y CONTROLES; Y PROCEDIMIENTO.
(11/06/2015). Ver ilustración. Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: CARMONA ACOSTA,Carlos.
Máquina robotizada y/o telecomandada para retiro e inserción de equipos switchgear que elimina el riesgo de arco eléctrico al operador, comprende: un chasis principal que estructura toda la máquina; un conjunto motriz que permite que la máquina se desplace en el plano completo; un sistema soporte que permite unir el conjunto motriz al chasis; una estructura superior que soporta un mecanismo de tracción para que el equipo switchgear sea retirado e insertado; al menos una cámara de visión; y un tablero de fuerza, un tablero de control y una interfaz hombre máquina, los cuales tienen la función de proveer de energía y control a la máquina robótica. Además, se protege el procedimiento de retiro e inserción del equipo switchgear.
Dispositivo para el tratamiento térmico de una pieza de trabajo.
(08/04/2015) Dispositivo para el tratamiento térmico de una pieza de trabajo con una herramienta de tratamiento térmico regulable perpendicularmente con respecto a la superficie de la pieza de trabajo , y con un accionamiento para ajustar una distancia de trabajo (A), estando el accionamiento para el ajuste de la distancia de trabajo en conexión activa con la herramienta de tratamiento o con una parte de la misma y configurado como un accionamiento de bobina móvil que presenta un imán , que genera un campo magnético, y que está provisto de una bobina (5a; 5b) dispuesta en el campo magnético, pudiendo moverse el imán y la bobina (5a; 5b) el uno con respecto al otro a lo largo de un eje de desplazamiento en función de una corriente eléctrica, presentando…
Método de control del accionamiento de un brazo robótico y brazo robótico que utiliza dicho método.
(19/02/2015) Método de control del accionamiento de un brazo robótico y brazo robótico que utiliza dicho método.
Método de control del accionamiento de un brazo robótico que comprende las siguientes etapas: a) mover el brazo robótico mediante una acción programada en un controlador; b) medir la fuerza que el brazo robótico realiza en determinados puntos del movimiento de la etapa a); c) comparar la fuerza ejercida en cada uno de los puntos de la etapa b) con datos de un perfil de fuerza almacenados en el controlador; d) como resultado de la comparación del punto c), generar una señal de alarma si la fuerza medida en la etapa b), se encuentra fuera de los límites definidos en…
Método para control anticolisión y la gestión de dispositivos de recogida con áreas de trabajo compartidas en una línea de empaquetado.
(11/02/2015) Método para el control anticolisión y la asignación de misiones a dispositivos de recogida de una línea de empaquetado, comprendiendo dicha línea:
- al menos un primer transportador lineal para la entrada de artículos,
- al menos un segundo transportador lineal para la salida de artículos,
- una pluralidad de dispositivos de recogida , estando adaptado cada uno de dichos dispositivos para realizar misiones para la recogida de artículos desde dicho primer transportador y misiones para la entrega de artículos en localizaciones predeterminadas sobre dicho segundo transportador o dentro de contenedores transportados por dicho segundo transportador,
- teniendo cada uno de los dispositivos de recogida un área de trabajo respectiva que comprende…
Robot humanoide dotado de un gestor de sus recursos físicos y virtuales, procedimientos de utilización y de programación.
(21/01/2015) Robot humanoide adecuado para ejecutar una pluralidad de comportamientos bajo el control de un módulo de gestión integrado a bordo que comprende un submódulo de gestión de una pluralidad de recursos que pueden estar asignados para la ejecución de dichos comportamientos, estando dicho robot caracterizado por que dicha pluralidad de comportamientos y dicha pluralidad de recursos están organizados cada uno en subconjuntos jerárquicos y por que dicho submódulo de gestión de los recursos es adecuado para ser programado para reservar al menos un recurso que pertenece a al menos un subconjunto de recursos para la ejecución de al menos un comportamiento que pertenece…
Método para encontrar trayectorias articuladas factibles para un robot n-dof con un proceso invariante de giro (n >5).
(01/10/2014) Un método implementado por ordenador para determinar unas trayectorias articuladas factibles para un robot de n-dof (n >5) en un procesamiento invariante de giro de un objeto, tal como una molienda, una pintura y una soldadura, comprendiendo dicho método las etapas de:
- recibir datos geométricos que representan el objeto;
- recibir datos geométricos que representan la herramienta de procesamiento;
- recibir una trayectoria X (t) de herramienta, en la que t es el tiempo;
• buscar trayectorias qRobot (t) factibles usando IK (t) y qTool (t) como un conjunto de posibles soluciones en el tiempo t, en donde qRobot (t) define posiciones de todas las…
Procedimiento para el calibrado de un punto de trabajo de herramientas para robots industriales.
(16/07/2014) Procedimiento para el calibrado de un punto de trabajo (TCP) de herramientas para robots industriales con un dispositivo de calibrado , que tiene al menos dos barreras de luz que están dispuestas de forma angular una respecto a la otra, con un ángulo opuesto por el vértice (α) superior a cero y que se cruzan en un punto de cruce (R) y que presenta las siguientes etapas:
a) definición de coordenadas de posición DE CONSIGNA TCP de un punto de trabajo DE CONSIGNA (TCPDE CONSIGNA) de la herramienta , usándose como referencia un punto base de la herramienta (W) del robot industrial y de un sistema de coordenadas TCP que usa…
Procedimiento y dispositivo para la supervisión de un espacio de un manipulador.
(04/06/2014) Procedimiento para la supervisión de un espacio de manipulador (WS) de un manipulador móvil, en particular de un robot móvil , a través de la supervisión del espacio para detectar objetos no previstos por medio de una instalación de detección del entorno (3a - 3d), caracterizado por que el espacio supervisado es predeterminado al menos de forma parcialmente automática con relación al manipulador en función de una posición de base detectada (TBU) del manipulador en su entorno.
{kind=link}