45 patentes, modelos y diseños de IROBOT CORPORATION
Sección de la CIP Necesidades corrientes de la vida
(17/06/2020). Inventor/es: MORIN,RUSSELL WALTER, BOESCHENSTEIN,HAROLD, SWETT,DAVID ORRIN, JONAS,JUDE ROYSTON. Clasificación: A47L9/28, A47L9/14, A47L9/19.
Un robot móvil que comprende:
un cuerpo configurado para atravesar una superficie y recibir residuos desde la superficie; y
un depósito de residuos dentro del cuerpo, comprendiendo el depósito de residuos:
una cámara para contener los residuos recibidos por el robot móvil;
un orificio de escape a través del cual los residuos salen del depósito de residuos, estando el orificio de escape en una parte inferior del depósito de residuos;
una unidad de compuerta que comprende una tapa configurada para moverse, en respuesta a una presión de aire en el orificio de salida, entre una posición cerrada para cubrir el orificio de escape y una posición abierta para abrir un trayecto entre la cámara y el orificio de escape;
caracterizado por que la unidad de compuerta, que incluye la tapa en la posición abierta y en la posición cerrada, está por encima de una superficie inferior del cuerpo.
PDF original: ES-2818116_T3.pdf
Robot que sigue la pared.
Sección de la CIP Necesidades corrientes de la vida
(26/02/2020). Inventor/es: LU,PING-HONG, WOLFE,BRIAN. Clasificación: A47L9/00.
Un método para controlar un robot de limpieza que tiene un paño de limpieza , que comprende:
ejecutar un comportamiento de seguimiento de pared manteniendo un contacto continuo entre una superficie de pared y el paño de limpieza del robot mientras se mantiene un ángulo pequeño entre el robot y la superficie de pared,
caracterizado por:
utilizar un sensor del robot para permitir un contacto continuo entre el paño de limpieza del robot y la superficie de pared, mientras el robot rastrea la superficie de pared.
PDF original: ES-2793599_T3.pdf
Monitorización de residuos.
(20/11/2019) Un sistema de monitorización de residuos para un robot de cobertura autónomo, que comprende:
un receptáculo que define una abertura rectangular para recibir residuos en el receptáculo , teniendo la abertura una parte superior y una parte inferior, estando la parte superior por encima de la parte inferior a medida que los residuos se reciben en el receptáculo ;
un primer y segundo emisor (756, 804A, 804B) dispuestos en lados opuestos de la abertura , cada uno dispuesto de modo que emita una señal a través de al menos una parte de la abertura , caracterizado por un primer receptor (760; 802A) próximo al primer…
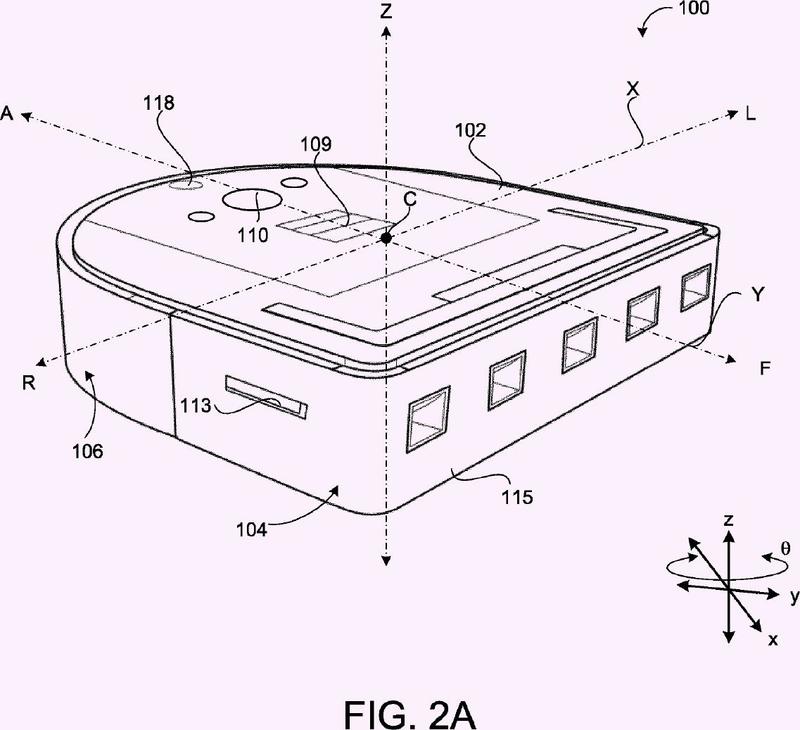
Movimiento restrictivo de un robot móvil.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(24/07/2019). Ver ilustración. Inventor/es: WILLIAMS,MARCUS, LU,PING-HONG, JOHNSON,JOSEPH M. Clasificación: G05D1/02, B25J9/16, B25J5/00.
Un robot que comprende:
un cuerpo que se puede mover en relación con una superficie ;
uno o más dispositivos de medición dentro del cuerpo para emitir información basándose en una orientación del cuerpo en una ubicación inicial en la superficie ; y
un controlador dentro del cuerpo para determinar la orientación del cuerpo basándose en la información, y
caracterizado por que el controlador está configurado además para restringir el movimiento del cuerpo a un área impidiendo el movimiento del cuerpo más allá de una barrera virtual que define un límite que el robot no puede cruzar que es creado basándose en la orientación del cuerpo y la ubicación inicial, y
el controlador está configurado además para almacenar la barrera virtual que ha de ser utilizada subsiguientemente para restringir el movimiento del robot.
PDF original: ES-2746498_T3.pdf
Limpieza de pisos autónoma con almohadilla extraíble.
(04/06/2019) Un robot de limpieza de pisos autónomo , que comprende:
un cuerpo del robot ;
un controlador apoyado en el cuerpo del robot ;
un accionamiento que soporta el cuerpo del robot para maniobrar el robot a través de una superficie del piso en respuesta a las órdenes del controlador ;
un soporte de almohadillas unido a la parte inferior del cuerpo del robot y para sostener una almohadilla de limpieza extraíble durante el funcionamiento del robot de limpieza , comprendiendo la almohadilla de limpieza extraíble una placa de montaje y una superficie de montaje , estando unida la placa de montaje a la superficie de montaje ; y
caracterizado en que el robot comprende, además:
un sensor de almohadillas para detectar una característica de identificación…
Cobertura multimodal para un robot autónomo.
(16/05/2019) Un robot móvil , que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento;
en el que dicho sistema de control tiene un modo de seguimiento de obstáculos, mediante el cual dicho robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación;
dicho sistema de control está configurado para hacer funcionar el robot en uno o varios comportamientos que incluyen un comportamiento de cobertura en el que el sistema de control alterna cíclicamente entre…
Robot autónomo de limpieza de superficies.
(16/05/2019) Un robot móvil de limpieza de suelos que comprende:
un cuerpo de robot que define una dirección (F) de accionamiento hacia delante;
un sistema de accionamiento que soporta el cuerpo de robot para maniobrar el robot a través de una superficie , comprendiendo el sistema de accionamiento ruedas de accionamiento derecha e izquierda (124a, 124b) dispuestas en las partes derecha e izquierda correspondientes del cuerpo de robot; y
un conjunto de limpieza dispuesto sobre el cuerpo de robot, comprendiendo el conjunto de limpieza:
un soporte de almohadilla dispuesto delante de las ruedas motrices (124a, 124b) y que tiene…
Limpieza autónoma de suelos con una almohadilla extraíble.
(30/04/2019) Un robot autónomo de limpieza de suelos, que comprende:
un cuerpo de robot que define una dirección de accionamiento hacia delante;
un controlador soportado por el cuerpo de robot;
un accionamiento que soporta el cuerpo de robot y configurado para maniobrar el robot a través de una superficie en respuesta a comando del controlador;
un soporte de almohadilla dispuesto en una parte inferior del cuerpo de robot y configurado para retener una almohadilla de limpieza extraíble (120; 600; 700; 800A-800F) durante el funcionamiento del robot de limpieza; y caracterizado por que el robot autónomo de limpieza de suelos comprende además:
un sensor de almohadilla dispuesto para detectar una característica de una almohadilla de limpieza sostenida…
(02/04/2019) Un sistema de robot de cobertura autónomo que comprende:
un contestador de límite activo que comprende un cable alimentado con una corriente modulada colocado a lo largo de un perímetro (1006A,1006B) de una propiedad ; al menos un contestador de límite pasivo (600,600A,600B,600C,600D,600E,600F,600G,600H,600I,6010,6010A,6010B,6010C) colocado en el interior de una propiedad (1001 A) limitado por el contestador de límite activo ; y
un robot para el cuidado del césped autónomo que comprende:
un cuerpo ; un sistema de accionamiento transportado por el cuerpo y configurado para maniobrar el robot a lo largo del interior de la propiedad (1001A);
y
un sistema…
Sección de la CIP Física
(01/04/2019). Inventor/es: SANDIN,PAUL E, Campbell,Tony L, HALLORAN,Michael J, MAMMEN,Jeffry W, WALKER,Jason S, BILLINGTON,John N. JR, OZICK,DANIEL M. Clasificación: G05D1/02.
Un sistema de distribución de contenido tematizado para distribuir datos a un robot , incluyendo el sistema:
un primer servidor configurado para funcionar en conjunto y en comunicación con una primera red;
un nodo del lado del usuario configurado para transmitir datos al robot ;
un servidor de contenido configurado para funcionar en conjunto y en comunicación con la primera red y para transmitir contenido tematizado al robot a través del nodo del lado del usuario utilizando la primera red, caracterizado por que,
el contenido tematizado incluye una agrupación de movimientos o comportamientos de robot funcionales, en donde el contenido tematizado se selecciona basándose en la monitorización y análisis de los datos generados por el robot.
PDF original: ES-2706729_T3.pdf
(01/04/2019) Un sistema de robot de limpieza que comprende:
un puente de datos de red que comprende:
una interfaz de red de banda ancha que se puede conectar a una red de protocolo de Internet que transporta comunicaciones transferidas cumpliendo un protocolo de Internet;
una interfaz de comandos inalámbrica que se puede conectar a una red de protocolo de comandos inalámbricos y que transporta comunicaciones transferidas según un protocolo de comandos; y
un componente de puente de datos adaptado para extraer los comandos en serie recibidos mediante la interfaz de red de banda ancha desde el protocolo de internet y para aplicar el protocolo de comandos al mismo, y para enviar los comandos en serie mediante la interfaz inalámbrica de banda estrecha; y
un robot de limpieza móvil que comprende:
un sistema de dirección…
Rodillo elástico y compresible y robot de cobertura autónomo.
(27/03/2019) Robot de cobertura autónomo que comprende:
un chasis que tiene partes delantera y trasera,
un sistema de accionamiento montado en el chasis y configurado para maniobrar el robot sobre una superficie de limpieza, y
un cabezal de limpieza montado en el chasis, en el que el cabezal de limpieza comprende:
rodillos delantero y trasero, que giran en sentido contrario, configurados para recuperar residuos (D) desde la superficie de limpieza, caracterizado por que cada rodillo comprende:
un tubo exterior elastomérico, elástico, formado de manera integral y homogénea, que tiene un durómetro comprendido entre 60A y 80A y un espesor de pared comprendido entre 1/2 mm y 3 mm para mantener un área de sección transversal predeterminada entre los…
Sección de la CIP Necesidades corrientes de la vida
(13/03/2019). Inventor/es: WILLIAMS,MARCUS, ROMANOV,NIKOLAI, JOHNSON,JOSEPH M, DOOLEY,MICHAEL J. Clasificación: A47L13/16, A47L11/28.
Una almohadilla de limpieza de superficies que comprende:
un núcleo absorbente que contiene material fibroso que absorbe y retiene material líquido, una capa de cobertura en contacto y cubriendo al menos un lado del núcleo absorbente, que contiene un material fibroso que retiene y absorbe por efecto mecha un material líquido a través de la capa de cobertura, y una capa de respaldo fijada a la almohadilla, estando la capa de respaldo configurada para fijar la almohadilla a un robot de limpieza,
caracterizada por que
la capa de respaldo sobresale más allá de los bordes longitudinales de la almohadilla y los bordes longitudinales sobresalientes de la capa de respaldo están configurados para fijarse a un soporte de almohadilla del robot, y en donde la capa de respaldo incluye recortes centrados a lo largo de los bordes longitudinales sobresalientes de la capa de respaldo.
PDF original: ES-2703924_T3.pdf
Robot que sigue la pared.
(27/02/2019) Un robot que comprende:
un cuerpo que puede moverse con respecto a una superficie ;
un parachoques montado en el cuerpo para permitir el movimiento del parachoques con respecto al cuerpo, pudiendo moverse el parachoques entre una posición no comprimida con respecto al cuerpo y una posición comprimida con respecto al cuerpo;
un primer sensor (112R) para producir una primera señal en respuesta al movimiento del parachoques con respecto al cuerpo provocado por el contacto entre el parachoques y la superficie, variando linealmente la primera señal con el movimiento del parachoques con respecto al cuerpo; y un controlador configurado para controlar el movimiento del cuerpo para hacer que el cuerpo rastree la superficie basándose en un valor (X), basándose…
Limpieza de pisos autónoma con almohadilla extraíble.
Secciones de la CIP Necesidades corrientes de la vida Técnicas industriales diversas y transportes
(20/02/2019). Inventor/es: WILLIAMS,MARCUS, LU,PING-HONG, JOHNSON,JOSEPH M, FORAN,DANIEL, GRAZIANI,ANDREW. Clasificación: A47L11/40, A47L9/28, A47L13/24, A47L13/16, A47L9/06, B08B7/04, B08B1/00, A47L11/24.
Un conjunto de almohadillas de limpieza de robots autónomos (120; 800E; 1000; 1200; 300) de diferentes tipos, comprendiendo cada una de las cuales:
un cuerpo de almohadilla que tiene superficies amplias opuestas, que incluyen una superficie de limpieza y una superficie de montaje;
una característica de identificación del tipo de almohadilla indicativa de un tipo de almohadilla de limpieza; y
una placa de montaje (802E; 1006; 1206; 1306) asegurada a través de la superficie de montaje del cuerpo de la almohadilla y que comprende un recorte (803E, 1012, 1212, 1305) que define al menos en parte la característica de identificación del tipo de almohadilla , habilitando la placa de montaje un sensor de almohadilla de un robot , cuando la almohadilla de limpieza se monta en el robot, para detectar la característica de identificación del tipo de almohadilla.
PDF original: ES-2726712_T3.pdf
(13/02/2019) Un robot móvil autónomo que comprende:
un chasis;
un sistema de accionamiento montado en el chasis;
un sistema de control en comunicación con el sistema de accionamiento;
un cabezal de limpieza montado en el chasis y que presenta una caja inferior;
un depósito de recogida de basura montado en el chasis; y una ruta de aire de aspiradora que presenta una entrada de aspiradora y una salida de ruta de aire, estando la ruta de aire de aspiradora configurada para suministrar basura (D) desde el cabezal de limpieza hasta el depósito de recogida de basura, extendiéndose la ruta de aire de aspiradora entre el cabezal de…
(16/01/2019) Un sistema de robots que incluye:
un robot móvil de limpieza con aspiración, de fregado de suelos o de corte de césped ;
un sistema de comunicación inalámbrico para comunicarse con el robot móvil, en donde el sistema de comunicación inalámbrico incluye una unidad de interfaz de red configurada para comunicarse con capacidad de comunicación con una primera red y para transmitir datos al robot de forma inalámbrica;
un servidor configurado para comunicarse con la unidad de interfaz de red por medio de la primera red, en donde la unidad de interfaz de red se configura para convertir los datos de un protocolo inalámbrico a un protocolo de red utilizado por la primera red;
en donde…
Eliminación de residuos de robots de limpieza.
Sección de la CIP Necesidades corrientes de la vida
(10/12/2018). Inventor/es: WON,CHIKYUNG, SVENDSEN,SELMA, DUBROVSKY,ZIVTHAN A, HICKEY,STEPHEN A, LOWRY,JED, SWETT,DAVID, DEVLIN,JOHN, SCHNITTMAN,MARK STEVEN. Clasificación: A47L9/10.
Una estación de acoplamiento del robot que comprende:
un alojamiento de estación;
una plataforma de acoplamiento que porta el alojamiento de estación y configurada para soportar un robot cuando se acopla;
un contenedor de recogida ;
un filtro de aspiración ; y
un sistema de aspiración ciclónica o sin bolsa circulatorio configurado para aspirar aire y residuos del contenedor de limpieza del robot , con el fin de depositar los residuos en el contenedor de residuos utilizando la aceleración centrípeta de los residuos para desviar los residuos de un flujo de aire o del filtro de aspiración , en la que el filtro de aspiración es amovible de la estación de acoplamiento de robots con el contenedor de recogida de residuos.
PDF original: ES-2693223_T3.pdf
Sistema SONAR para un vehículo autónomo.
Secciones de la CIP Necesidades corrientes de la vida Física
(05/12/2018). Inventor/es: WETHERN,THOMAS JAMES. Clasificación: A47L11/40, G01S15/93, G01S7/521, G10K11/02.
Un sistema SONAR para su uso con un vehículo remoto , comprendiendo el sistema SONAR:
al menos un emisor SONAR que presenta una guía de ondas adaptada para guiar un sonido emitido desde el emisor hacia un entorno del vehículo remoto; y
al menos dos receptores SONAR , donde cada receptor SONAR presenta una guía de ondas adaptada para recibir sonido reflejado desde un entorno del vehículo remoto,
donde cada guía de ondas del emisor y los receptores comprenden paredes laterales , una pared superior y una pared inferior ,
caracterizado por que una o más guías de ondas del sistema SONAR están abocinadas y presentan un mayor abocinamiento en sus paredes laterales que en su pared superior y su pared inferior.
PDF original: ES-2692888_T3.pdf
Robot para el cuidado del césped.
Sección de la CIP Física
(13/09/2018). Inventor/es: SANDIN,PAUL E, Ozick,Daniel N, Campbell,Tony L, MAMMEN,Jeffry W, DUBROVSKY,ZIVTHAN A, JONES,JOSEPH L, COHEN,DAVID A, VU,CLARA, PRENETA,JOSHUA B, GILBERT,DUANE L, BERGMAN,JOHN, LEWIS,DAVID M. Clasificación: G05D1/02.
Un cortacésped robot que comprende:
un cuerpo ;
un sistema de accionamiento transportado por el cuerpo y configurado para maniobrar el robot a lo largo del césped ;
una cortadora de césped (200, 200A, 200B, 2000A, 2050, 2100, 2200) transportada por el cuerpo ;
y
un detector de borde de franja (310A, 310B, 310C, 310D, 310E, 310F, 310G, 310H, 310I) transportado por el cuerpo y configurado para detectar un borde de franja entre el césped cortado y el césped no cortado , mientras el sistema de accionamiento maniobra el robot a lo largo del césped mientras sigue un borde de franja detectado ,
caracterizado por que el detector de borde de franja (310, 310A, 310B, 310C, 310D, 310E, 310F, 310G, 310H, 310I) incluye un calibrador (320, 320A, 320B) que monitoriza el césped no cortado adyacente al borde de franja para la calibración del detector de borde de franja (310, 310A, 310B, 310C, 310D, 310E, 310F, 310G, 310H, 310I).
PDF original: ES-2681523_T3.pdf
Sistema de control de navegación para un dispositivo robótico.
(28/03/2018) Un dispositivo robótico de limpieza que comprende:
un chasis y un armazón externo asegurado al chasis que define una cubierta estructural de una altura que facilita el movimiento del dispositivo robótico de limpieza por debajo de los muebles;
unos conjuntos izquierdo y derecho de ruedas motrices principales (112L, 112R) y unos motores eléctricos independientes (114L, 114R) respectivos, montados de manera independiente en combinación con el chasis que se desplaza con el pivotamiento permitido, para un movimiento pivotante con respecto a este en extremos opuestos del diámetro transversal del chasis , y que se puede mover entre una posición retraída, sometida al peso del dispositivo robótico de limpieza durante su funcionamiento, y una posición extendida, donde…
Método y sistema de cobertura multicódigo para un robot autónomo.
(10/01/2018) Un robot móvil que comprende:
(a) medios para mover el robot sobre una superficie;
(b) un sensor de detección de obstáculos , un sensor de seguimiento de obstáculos , un detector de precipicios y un sensor de caída de rueda que es capaz de detectar si una o más ruedas no están soportadas por la superficie;
(c) y un sistema de control conectado con capacidad de funcionamiento a dicho sensor de detección de obstáculos y dichos medios de movimiento;
(d) configurado dicho sistema de control para hacer funcionar el robot en varios modos, comprendiendo dichos varios modos:
un modo de seguimiento de obstáculos mediante el cual dicho robot se desplaza adyacente a un obstáculo, en donde el sensor de seguimiento de…
Detección de proximidad en robots móviles.
(01/11/2017) Un robot autónomo que comprende:
un cuerpo del robot que define una dirección motriz de avance (F);
un sistema motriz que soporta el cuerpo del robot y configurado para maniobrar el robot sobre una superficie (10, 10a, 10b);
al menos un detector de proximidad (520, 520a, 520b, 520c, 520d, 520e, 520f) que comprende:
un primer componente que tiene un primer campo de visión ;
un segundo componente (522a, 524a) que tiene un segundo campo de visión (523a, 525a), intersectando el primer campo de visión el segundo campo de visión (523a, 525a) para formar un primer volumen de intersección (V1);
…
Método y sistema para el control a distancia de un robot móvil.
(21/06/2017) Un método para permitir a un usuario controlar a distancia un robot, cuyo método comprende: proporcionar información de imagen, capturada por una cámara de vídeo, representativa de una zona situada alrededor del robot;
proporcionar, utilizando la información de imagen, una imagen de vídeo perceptible por un usuario representativa de la zona situada alrededor del robot ;
determinar una localización de la cámara de vídeo relativa a una posición actual del robot, comprendiendo la determinación de tramas de referencia en la zona situada alrededor del robot ;
permitir al usuario designar, en la imagen de vídeo perceptible por un usuario, un objetivo hacia el cual debe desplazarse el robot, cuya función comprende:
determinar una localización de clic dentro de la imagen de vídeo perceptible por un usuario seleccionada por el…
Robot de cobertura autónoma.
(17/05/2017) Un robot móvil que comprende:
un cuerpo de robot dotado de una dirección de impulsión de avance;
un sistema de impulsión que soporta el cuerpo del robot por encima de una superficie de suelo para maniobrar el robot a través de la superficie de suelo ;
una placa de circuito principal en comunicación con el sistema de impulsión ;
un bastidor de parachoques que define una forma complementaria de una periferia frontal del cuerpo del robot, estando el bastidor del parachoques soportado por el cuerpo del robot; y
un sistema sensor de obstáculos dispuesto en el bastidor del parachoques,…
Sección de la CIP Física
(08/02/2017). Inventor/es: SANDIN,PAUL E, Campbell,Tony L, HALLORAN,Michael J, MAMMEN,Jeffry W, WALKER,Jason S, BILLINGTON,John N. JR, OZICK,DANIEL M. Clasificación: G05D1/02.
Un robot que comprende:
un controlador ;
un radio receptor configurado para recibir contenido audible mediante una transmisión inalámbrica;
una memoria configurada para almacenar el contenido audible;
un altavoz configurado para emitir el contenido audible; e
indicaciones capaz de ser controladas mediante el controlador y configuradas para indicar información de funcionamiento en un primer modo; e
indicar información ilustrativa en coordinación con el contenido audible en un segundo modo;
en donde el segundo modo corresponde a un modo de entrenamiento, donde el altavoz emite un programa instructivo de entrenamiento audible, y donde en el segundo modo, el robot muestra las indicaciones según un patrón de entrenamiento en coordinación sincronizada con el contenido audible, en donde el contenido audible contiene un programa instructivo/de entrenamiento.
PDF original: ES-2623920_T3.pdf
Secciones de la CIP Física Técnicas industriales diversas y transportes Necesidades corrientes de la vida
(14/09/2016). Inventor/es: MAMMEN,JEFFREY W, SANDIN,PAUL E, Ozick,Daniel N, Campbell,Tony L, DUBROVSKY,ZIVTHAN A, JONES,JOSEPH L, COHEN,DAVID A, LEWIS JR.,DAVID M, VU,CLARA, PRENETA,JOSHUA B, GILBERT,DUANE L, BERGMAN,JOHN. Clasificación: G05D1/02, B60L11/18, B60L11/12, A01D34/00, B60L3/00.
Un cortacésped robot que comprende:
un cuerpo ;
un sistema de accionamiento transportado por el cuerpo y configurado para maniobrar el robot a lo largo del césped;
un controlador transportado por el cuerpo y en comunicación con el sistema de accionamiento ; al menos un sensor de obstáculos transportado por el cuerpo y configurado para detectar un obstáculo potencial próximo al robot;
en donde el controlador se configura para funcionar en un modo de configuración de control en el cual un usuario maniobra el robot para circunnavegar y acercarse a límites, obstáculos y/o áreas resguardadas marcadas mientras el robot se encuentra en un modo manual y permitir el funcionamiento del robot en un modo autónomo solo después de haber completado el modo de configuración de control,
caracterizado por que el sistema de accionamiento se configura para dirigir el robot a una velocidad más rápida durante el modo manual que en el modo autónomo.
PDF original: ES-2654513_T3.pdf
Robot móvil para limpieza de suelos con detección del tipo de suelo.
Sección de la CIP Necesidades corrientes de la vida
(24/08/2016). Inventor/es: SANTINI,FABRIZIO. Clasificación: A47L9/28.
Un robot de limpieza que comprende:
un bastidor ;
un accionamiento conectado al bastidor y configurado para accionar el robot a través de la superficie del suelo;
un conjunto de cabeza de limpieza acoplado al bastidor y posicionado para aplicarse a la superficie del suelo mientras el robot es maniobrado por el accionamiento;
caracterizado por un sensor de movimiento que responde a cambios en el cabeceo, siendo transportado el sensor de movimiento por el bastidor; y
un circuito controlador en comunicación con el conjunto de cabeza de limpieza y el sensor de movimiento, estando configurado el circuito controlador para determinar un tipo de solado o revestimiento asociado con una característica de limpieza del robot y configurado para alterar la característica de limpieza del robot en función de una señal procedente del sensor de movimiento indicativa de un cambio en el cabeceo provocado por el robot al atravesar una discontinuidad del solado.
PDF original: ES-2634251_T3.pdf
(10/08/2016) Un robot móvil , que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento; en el que
dicho sistema de control tiene un modo de seguimiento de obstáculos, mediante el cual dicho robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación, mediante el cual el robot se desplaza sustancialmente en una dirección alejándose del obstáculo;
dicho sistema de control está configurado para hacer funcionar el robot en uno o varios comportamientos que incluyen…
Procedimiento y sistema de cobertura plurimodal para un robot autónomo.
(10/08/2016) Un robot móvil, que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento;
teniendo dicho sistema de control un comportamiento de cobertura, en el que el sistema de control alterna en un ciclo entre un modo de seguimiento de obstáculos, en el que el robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación, en el que el robot se desplaza sustancialmente en una dirección alejándose del obstáculo;
caracterizado por que el sistema de control está configurado de modo que haga funcionar el robot en una pluralidad de comportamientos que incluyen…
Eliminación de residuos de robots de limpieza.
Sección de la CIP Necesidades corrientes de la vida
(20/04/2016). Inventor/es: WON,CHIKYUNG, SVENDSEN,SELMA, SCHNITTMAN,MARK, DUBROVSKY,ZIVTHAN A, HICKEY,STEPHEN A, LOWRY,JED, SWETT,DAVID, DEVLIN,JOHN. Clasificación: A47L11/40, A47L9/10, A47L11/33.
Una estación de mantenimiento para mantener un limpiador robótico que comprende:
un alojamiento de estación y una plataforma sobre la que el limpiador robótico está soportado durante su servicio de mantenimiento;
un contenedor de recogida fijado de manera amovible al alojamiento en el que el contenedor de recogida es diferente de un contenedor de limpiador situado en el limpiador robótico porque su propósito principal es recoger y acumular a partir del contenedor de limpiador del limpiador robótico ; y
una interfaz de usuario amovible y utilizable a distancia externamente a la estación de mantenimiento y configurada para comunicar inalámbricamente a un módulo de comunicación sobre la estación de mantenimiento y/o a una instalación de comunicación compatible sobre el limpiador robótico , en que la interfaz de usuario incluye un indicador de contenedor de recogida lleno de la estación de mantenimiento.
PDF original: ES-2583374_T3.pdf
Robot autónomo de cubrimiento compacto.
(08/03/2016) Robot autónomo de cubrimiento que comprende:
un chasis que tiene partes delantera y posterior , definiendo la parte delantera una forma sustancialmente rectangular y definiendo la parte posterior una forma arqueada;
un sistema de accionamiento portado por el chasis configurado para maniobrar el robot sobre una superficie de limpieza;
ruedas motrices accionadas de manera diferencial derecha e izquierda ;
un conjunto de limpieza montado en la parte delantera del chasis ;
un compartimento de basura dispuesto adyacente al conjunto de limpieza y configurado para recibir residuos agitados por el conjunto de limpieza ;
un sensor antichoque configurado para detectar movimiento en múltiples direcciones;
caracterizado por que…
{kind=link}