CIP-2021 : G05D 1/08 : Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/08[1] › Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/08 · Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático.
(11/03/2020) Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático alrededor del eje longitudinal (L) del mismo, en el que el vehículo acuático presenta al menos un accionamiento para generar un chorro de empuje para el vehículo acuático , en el que se mide al menos una magnitud de medida que caracteriza el movimiento de balanceo y, en función de la magnitud de medida obtenida, se genera una fuerza transversal que contrarresta el movimiento de balanceo, caracterizado por que se miden como magnitudes de medida la duración del movimiento de balanceo y/o la velocidad y la dirección del movimiento de balanceo y el accionamiento que genera el chorro de empuje puede hacerse pivotar alrededor del eje vertical del vehículo acuático y conforme a un control se le hace pivotar…
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X.
(04/03/2020) Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino,
en donde el procedimiento exhibe las siguientes etapas:
a) probar si una pala de timón está bloqueada,
b) determinar cuál pala de timón está bloqueada,
c) determinar en cual ángulo está bloqueada la pala de timón bloqueada,
d) compensar el ángulo de control para las tres palas de timón remanentes,
m) actuar sobre las palas de timón,
en el que después de la etapa d) se ejecutan las siguientes etapas:
e) probar si uno de los ángulos de control que compensan es mayor que el máximo ángulo permisible de control,
f) cuando e) es positivo, entonces determinar cuál ángulo de control…
Guía de aproximación de director de vuelo.
(06/11/2019) Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método:
determinar una trayectoria de vuelo previa a la aproximación a una pista ;
calcular una altitud de activación de activación a lo largo de la trayectoria de vuelo previa a la aproximación ;
calcular una trayectoria de comando de aproximación que comprende una trayectoria lineal que se cruza con la pista en una ubicación de contacto con el suelo deseada y que tiene una pendiente asociada con una velocidad de altitud deseada en la ubicación de contacto con el suelo deseada , comprendiendo el cálculo:
una intersección de una trayectoria de vuelo de avión extrapolada y la pista ,
la ubicación de contacto con el suelo deseada en relación con la intersección de la trayectoria de vuelo del…
Filtro de Kalman modificado para la generación de correcciones de error de actitud.
(05/06/2019). Solicitante/s: THE BOEING COMPANY. Inventor/es: LI,RONGSHENG, TSAO,TUNG-CHING, NAYAK,ARUNKUMAR P.
Medio de almacenamiento legible por ordenador que comprende instrucciones ejecutables por ordenador que, cuando se ejecutan por un ordenador , provocan que el ordenador:
reciba mediciones (106B) de actitud a partir de sensores de actitud secundarios; y
genere valores de corrección de error de actitud para mediciones (106A) de actitud a partir de sensores de actitud principales basándose en las mediciones (106B) de actitud procedentes de los sensores de actitud secundarios usando ecuaciones ampliadas derivadas para un subconjunto de una pluralidad de submatrices por bloques divididas en bloques de 3x3, 3x2, 2x3 y 2x2 a partir de las matrices de 8x8 de un filtro de Kalman de 8 estados, calculándose previamente un resto de la pluralidad de submatrices por bloque.
PDF original: ES-2744473_T3.pdf
Sistema de formación de imágenes espaciales en tres dimensiones.
(03/06/2019) Sistema de formación de imágenes espaciales en tres dimensiones que comprende:
- al menos dos satélites (Sat1, Sat2) en órbita geocéntrica en un mismo plano orbital, de altitud inferior o igual a 2000 km, estando al menos dos de dichos satélites (Sat1, Sat2) provisto de un equipo de formación de imágenes ópticas de dos dimensiones y de medios de transmisión a tierra de las imágenes adquiridas en dos dimensiones en una configuración de adquisición estereoscópica entre los satélites,
- al menos una estación de recepción de datos en tierra, conectada a una red de comunicaciones,
- al menos un centro de procesamiento de imágenes recibidas…
Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable.
(29/05/2019) Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer eje acoplado mecánicamente a y alejado de un segundo eje , definiendo los ejes y pudiendo girarse alrededor de ejes longitudinales independientes, en el que un enlace de conexión permite la rotación de uno de los primeros ejes para hacer rotar uno correspondiente de los segundos ejes ; caracterizado porque el sistema de control de aeronave comprende además:
una pluralidad de transductores de posición, en el que uno respectivo de dicha pluralidad de transductores…
Métodos y aparatos de notificación de una asimetría de vuelo que influye en una aeronave.
(15/05/2019). Solicitante/s: THE BOEING COMPANY. Inventor/es: FONG,DICKSON, LUDTKE II,FREDERICK EMIL.
Un método, que comprende:
monitorizar una característica de balanceo de una aeronave ;
determinar una salida de un sistema de piloto automático de la aeronave para controlar la característica de balanceo; y
generar una alerta con base en la salida y una autoridad del sistema de piloto automático para controlar la característica de balanceo, en donde la característica de balanceo de la aeronave se selecciona del grupo que consiste en la actitud de balanceo, la velocidad de balanceo, la dirección de balanceo, y cambio de rumbo,
en donde generar la alerta comprende mostrar un gráfico a través de una pantalla de vuelo, el gráfico que indica una corrección que un piloto de la aeronave debe tomar y/o una dirección en la cual un piloto debe girar un yugo de la aeronave.
PDF original: ES-2741954_T3.pdf
Piloto automático de vehículo volador.
(24/04/2019) Un metodo implementado por ordenador para controlar un vehiculo volador, que comprende:
recibir, por un piloto automatico (218A) del vehiculo volador, una orden de guiado generada por un sistema de guiado del vehiculo volador; recibir, por el piloto automatico (218A) del vehiculo volador, una medicion de movimiento medida por un dispositivo de medicion de movimiento del vehiculo volador;
generar, por el piloto automatico (218A) del vehiculo volador, una pluralidad de estimadas de estado (230A) utilizando la medicion de movimiento cuando no se encuentra disponible equipo para realizar mediciones de estado real, en donde la pluralidad de estimadas de estado (230A) comprende una estimada de error, una estimada de un angulo de ataque y una estimada del regimen de cabeceo;
utilizar, por el piloto automatico (218A) del…
Métodos de control de actitud de aeronaves.
(10/04/2019) Un método para controlar la actitud de la aeronave, comprendiendo dicho método:
(a) calcular uno o más parámetros de configuración de la aeronave con base en una o más características físicas de una aeronave ;
(b) recibir, en un procesador, una señal indicativa de una actitud objetivo de la aeronave ;
(c) generar, con la ayuda del procesador, una señal de comando que se entregará a al menos un actuador de la aeronave acoplado operativamente a una o más unidades de propulsión de la aeronave , en donde dicha generación se basa en
la señal indicativa de la actitud objetivo de (b), y
el uno o más parámetros de configuración de la aeronave de (a), y donde dicha generación adicional utiliza un esquema de control de retroalimentación que incluye un circuito de aceleración angular con retroalimentación…
Control de excentricidad para satélites geosíncronos.
(20/02/2019) Un método de control de excentricidad para un satélite geosíncrono que tiene una órbita geosíncrona con una línea de órbita de nodos, comprendiendo el procedimiento:
establecer un cronograma para el control de excentricidad de la órbita geosíncrona utilizando una elipse de vector de excentricidad bidimensional que describe los componentes del vector de excentricidad objetivo durante un período anual, cada uno de los componentes del vector de excentricidad indica una magnitud y dirección para los vectores de excentricidad de la órbita geosíncrona;
definir una pluralidad de parámetros para la elipse del vector de excentricidad bidimensional que incluye un centroide para un locus de control, donde el locus de control define los componentes…
Sistema de gestión de detención.
(01/02/2019). Solicitante/s: THE BOEING COMPANY. Inventor/es: LYMAN, FRANK J., SMYTH,IV JOSEPH MICHAEL.
Un método para gestionar una aeronave durante el vuelo, que comprende:
identificar un ángulo de ataque de alerta para la aeronave utilizando una velocidad de alerta previamente identificada para la aeronave ;
identificar un coeficiente de sustentación de alerta para la aeronave utilizando un ángulo de ataque de alerta para la aeronave ; e
identificar una velocidad de alerta para la aeronave utilizando un coeficiente de sustentación de alerta para la aeronave y un coeficiente de sustentación actual para la aeronave.
PDF original: ES-2698249_T3.pdf
Sistemas y métodos para evitar que la cola de una aeronave entre en contacto con el suelo.
(08/01/2019). Solicitante/s: THE BOEING COMPANY. Inventor/es: EGGOLD,DAVID P, FLANZER,TRISTAN C.
Un método que comprende:
determinar un perfil de descenso sobre la base de una altitud actual y una velocidad vertical actual de una aeronave ;
determinar un perfil de cabeceo máximo que está asociado con el perfil de descenso ;
determinar un perfil de cabeceo actual sobre la base de una actitud de cabeceo actual y una tasa de cabeceo actual de la aeronave ;
comparar el perfil de cabeceo actual con el perfil de cabeceo máximo para determinar un perfil de cabeceo actual en exceso ; y
limitar una señal de orden de timón de profundidad sobre la base de la comparación para reducir una probabilidad de un golpe de cola de aeronave.
PDF original: ES-2695535_T3.pdf
Control de posición para aplicaciones ágiles de satélite.
(26/12/2018). Solicitante/s: Thales Alenia Space Italia S.p.A. Con Unico Socio. Inventor/es: ANANIA,MARCO, CASCONE,DOMENICO.
Un conjunto de giróscopo de momento de control , que incluye varios giróscopos de momento de control , y que está caracterizado por que cada giróscopo de momento de control tiene un respectivo cardán que está mecánicamente restringido para ser operable para realizar un número limitado de revoluciones completas sobre un respectivo eje de cardán.
PDF original: ES-2694691_T3.pdf
Método y sistema de control de velocidad de la aeronave.
(20/12/2018) Un sistema para el control de la velocidad de una aeronave, que comprende:
al menos un dispositivo de control de bucle externo , en el que el/cada dispositivo de control de bucle externo está dispuesto para recibir una o más variables de vuelo objetivo y para emitir un cabeceo objetivo nominal;
un dispositivo de control de bucle interno dispuesto para recibir un cabeceo objetivo y emitir una señal de control para controlar al menos un dispositivo de control de aeronave; y
un módulo de saturación dispuesto para recibir el cabeceo objetivo nominal y para emitir un cabeceo objetivo para el dispositivo de control de bucle interno ,
en el que…
Sistema de sustentación y estabilización para aeronaves UAV o Drones mediante fanes o aletas oscilantes accionadas eléctricamente.
(04/10/2018). Solicitante/s: MUÑOZ SAIZ,MANUEL. Inventor/es: MUÑOZ SAIZ,MANUEL.
El sistema de sustentación y estabilización para aeronaves uav o drones mediante fanes o aletas oscilantes accionadas eléctricamente, consiste en utilizar para la sustentación fanes o aletas oscilantes accionadas mediante señales o voltajes fijos y para la estabilización estas mismas señales variadas en función de las señales de error producidas por las inclinaciones respecto a los distintos ejes de giro alabeo, cabeceo y dirección de las aeronaves, uav o drones. Para el ascenso o descenso las señales que actúan para el alabeo y el cabeceo se incrementarán o reducirán simultáneamente.
PDF original: ES-2684859_A1.pdf
CONJUNTO DE ESCANEO POR LÁSER, VEHÍCULO Y PROCEDIMIENTO DE ESCANEO POR LÁSER CORRESPONDIENTES.
(27/09/2018). Solicitante/s: UNIVERSITAT DE GIRONA. Inventor/es: PALOMER VILA,Albert, RIBAS ROMAGÒS,David, RIDAO RODRÍGUEZ,Pere, FOREST COLLADO,Josep.
Conjunto de escaneo por láser, vehículo y procedimiento de escaneo por láser correspondientes. La invención obtiene una caracterización geométrica de la forma de una superficie a partir del principio de triangulación. El conjunto comprende: un emisor de luz láser, unos medios de difracción que transforman la luz láser en una configuración de abanico plano, unos medios de redireccionamiento que redirigen el haz y lo proyectan sobre la superficie , un receptor de luz que capta un área de escaneo que incluye el abanico y unos medios de control que controlan todos estos elementos. El receptor presenta unos medios de procesamiento propios para detectar los puntos iluminados en la imagen captada. Los medios de redireccionamiento están montados rotativos alrededor de al menos un eje fijo. El giro de los primeros medios de redireccionamiento está controlado por dichos medios de control de forma sincronizada con el resto de elementos.
Procedimiento y dispositivo de pilotaje de un artefacto orientable por medio de un accionador servomandado en actitud sobre una trayectoria.
(25/10/2017) Procedimiento de pilotaje en vuelo de un artefacto propulsado provisto de un accionador orientable, servomandado en actitud sobre una trayectoria y sometido a unas perturbaciones exteriores según el cual, al menos en cabeceo:
- se define previamente una ley de pilotaje que incluye un término corrector del primer orden, un término de transferencia que incluye unos parámetros característicos del artefacto y unas perturbaciones exteriores (A6, K1), una ganancia en actitud (Kp) y una ganancia en velocidad de actitud (Kv);
- se definen previamente unas relaciones de correlación entre la ganancia en velocidad de actitud y los parámetros del término corrector en función de la ganancia en actitud, unos parámetros del…
Maniobras de adquisición de una nave espacial usando un control sin giroscopio basado en la posición.
(04/10/2017) Un sistema para un control sin giroscopio de la actitud de una nave espacial basándose en mediciones de actitud y no mediciones del ritmo de cambio, caracterizado por que el sistema comprende:
una pluralidad de rastreadores de estrellas para proporcionar mediciones de la actitud de la nave espacial; un procesador de control de la actitud que produce órdenes de par; y
medios para producir pares que cambien la actitud de la nave espacial en respuesta a órdenes de par desde dicho procesador de control de la actitud ,
en el que dicho procesador de control de la actitud comprende:
un estimador para proporcionar la estimación de posición de la nave espacial en cuaternión que se calcula basándose en mediciones de la actitud de la nave…
Control de vuelo en formación.
(09/08/2017) Un aparato para controlar un vuelo en formación de una aeronave trasera con relación a un vórtice generado por una aeronave líder, que comprende:
un módulo de posición configurado para determinar una posición del vórtice con relación a la aeronave trasera con base en un vector de estado estimador que comprende una posición relativa entre el vórtice y la aeronave trasera, en donde el módulo de posición está, además, configurado para actualizar el vector de estado estimador en una comparación entre la posición del vórtice con relación a la aeronave trasera determinada por el módulo de posición y al menos una medición real de la posición relativa de la aeronave trasera con respecto al vórtice;
un módulo de posición deseada configurado para determinar una posición deseada de la aeronave trasera con relación al vórtice para suministrar…
Procedimiento y sistema para facilitar el aterrizaje autónomo de vehículos aéreos sobre una superficie.
(22/03/2017) Un sistema de aterrizaje electroóptico para facilitar el aterrizaje autónomo de vehículos aéreos sobre una superficie , que comprende medios emisores de haces dirigidos hacia abajo y medios de control para gobernar el vehículo, en el que el sistema comprende medios de captación de imágenes y medios de procesamiento para procesar los datos de imágenes, en el que los medios emisores de haces están dispuestos para emitir simultáneamente al menos cuatro haces dirigidos hacia la superficie con el fin de proyectar un patrón (4p, 5p, 6p, 7p, 8p) sobre la misma, en el que los medios de captación de imágenes captan imágenes subsiguientes del patrón, en el que el sistema…
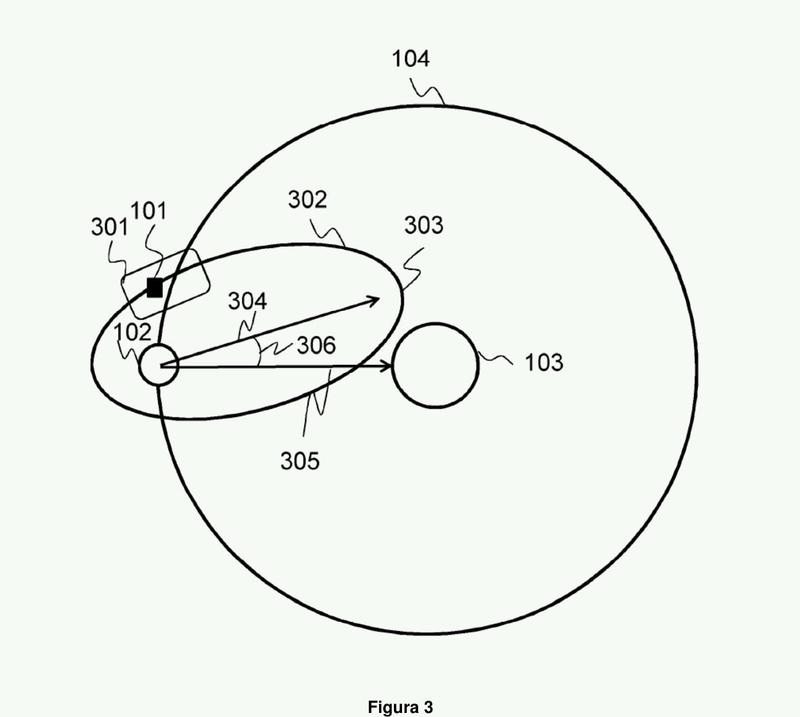
Procedimiento y dispositivo de optimización de la masa de un satélite.
(19/10/2016) Procedimiento para la optimización de la masa de un satélite destinado a una misión que consta de una fase de órbita alrededor de un cuerpo macizo a lo largo de una primera órbita elíptica cuya forma y cuya orientación están limitadas por otra fase de la misión, constando la primera órbita de un primer punto llamado periápside y de un segundo punto llamado apoápside , y estando asociada a una primera duración (D1) de eclipse máximo que necesita una primera masa (Mb1) de batería que permita mantener al satélite en funcionamiento durante dicha primera duración (D1) de eclipse máximo, caracterizándose dicho procedimiento…
Sistema de control de aeronaves no tripuladas de ala rotatoria para aterrizaje vertical en superficies móviles mediante pre-alimentación de fuerzas en el sistema de control, perfeccionado.
(06/06/2016). Solicitante/s: FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL. Inventor/es: ALARCÓN ROMERO,Francisco, BEJAR DOMINGUEZ,Manuel, SANDINO VELAZQUEZ,Luis Alberto, SANTAMARIA RUBIO,Daniel, VIGURIA JIMENEZ,Luis Antidio, JIMÉNEZ BELLIDO,Antonio, KONSTANTIN,Kondak, BELL SEILER,Allan Anderson.
Adición a la patente principal P201232073 basada en la incorporación de un sistema de control, consistente en unos sensores, que miden la tensión del cable que une la aeronave con la plataforma de aterrizaje y los ángulos de orientación de dicho cable con respecto a un sistema asociado a la aeronave, y un módulo de control que toma como entradas la tensión -tanto en magnitud como en dirección- obtenida de los sensores mencionados, además de las consignas de control generadas por el controlador de la aeronave. El módulo de control objeto de la invención calcula, a partir de la tensión en el cable, correcciones a introducir en las consignas de control.
PDF original: ES-2573152_A1.pdf
PDF original: ES-2573152_B1.pdf
Evaluación de la dinámica de un buque.
(11/05/2016). Solicitante/s: ThyssenKrupp Marine Systems GmbH. Inventor/es: DIEKMANN, ANDREAS, ZHENG,Qinghua, DIGNATH,Florian, SCHARMACHER,MANUEL.
Un procedimiento para la detección temprana del riesgo de aparición de oscilaciones de balanceo en una embarcación respecto a una resonancia del movimiento de balanceo, en el que se detecta el estado de movimiento respecto a la resonancia del movimiento de balanceo, detectándose durante la navegación al menos el movimiento de vaivén vertical, así como el movimiento de balanceo y poniéndose en relación uno al otro, detectándose el ángulo de balanceo (Ø ) o su evolución en el tiempo en una parte predeterminada del movimiento de vaivén vertical, caracterizado porque de este modo se determina la potencia de balanceo (PØ ), la energía de balanceo o la evolución en el tiempo de la potencia de balanceo o de la energía de balanceo y se usa como medida para un riesgo de aparición de la oscilación de balanceo.
PDF original: ES-2586572_T3.pdf
Un método para mantener una nave espacial en posición geoestacionaria, y un sistema para llevarlo a cabo.
(17/02/2016). Ver ilustración. Solicitante/s: Ohb Sweden AB. Inventor/es: BATTELINO,MILAN, EDFORS VANNEVIK,ANDERS GUNNAR.
Un método para mantener en posición una nave espacial en un slot definido de una órbita geoestacionaria , comprendiendo la nave espacial:
al menos dos unidades de propulsión que tienen fuerzas con componentes en una dirección este, oeste, sur y norte en un sistema de coordenadas fijado a la nave espacial, en donde el método comprende los pasos de:
situar la nave espacial en dicho slot definido de la órbita geoestacionaria,
controlar una dirección de un vector del apogeo que tiene su origen en el centro de la Tierra y apunta hacia un apogeo de la órbita geoestacionaria de la nave espacial para apuntar en una dirección con un ángulo dentro del intervalo de -90 a 90 grados desde una dirección de un vector del Sol que tiene su origen en el centro de la Tierra y que apunta hacia el Sol y controlando simultáneamente la excentricidad e inclinación de la órbita geoestacionaria para estar dentro del slot definido.
PDF original: ES-2625420_T3.pdf
Aparato y métodos para control de un vehículo.
(02/09/2015) Un método para hacer la transición de un vehículo desde un estado estáticamente estable a un estado dinámicamente balanceado, el vehículo que comprende un soporte al menos una rueda , una estructura de acoplamiento que tiene una porción (172a) de soporte acoplada al soporte y una porción (172b) de plataforma acoplada a al menos una rueda que le permite a la porción (172a) de soporte moverse o deslizarse hacia adelante y hacia atrás con respecto a la porción (172b) de plataforma, una transmisión acoplada a al menos una rueda para balancear dinámicamente el vehículo y suministrar potencia a al menos una rueda para propulsar el vehículo , un accionador acoplado a una estructura de acoplamiento para controlar la posición de la porción (172a) de soporte con relación…
Un método para estimar un ángulo de ataque y un ángulo de resbalamiento de una aeronave.
(15/07/2015) Un método para estimar un ángulo de ataque (a) y un ángulo de resbalamiento (b) de una aeronave que tiene una pluralidad de superficies de control ajustables cada una con respecto a una superficie de referencia asociada, comprendiendo el método las etapas de:
- medir cantidades (d1, d2, d3) representativas del ángulo formado por cada superficie de control con respecto a la superficie de referencia asociada;
- medir la velocidad de alabeo efectiva (pE), la velocidad de cabeceo efectiva (qE) y la velocidad de guiñada efectiva (rE) de la aeronave ;
- definir un modelo linealizado de un observador de estado de acuerdo con el siguiente sistema de ecuaciones:
donde u es un vector que contiene los valores de dichas cantidades (d1, d2, d3) de cada superficie de control , x…
Método y dispositivo para el control de estabilidad automático de paramotores radio control.
(28/05/2015) Método y dispositivo para el control de estabilidad automática de paramotores radio control.
En esta patente de invención se describen un dispositivo y un método para la estabilización automática de un paramotor radiocontrol mediante el uso de un microcontrolador y un acelerómetro, ambos equipados en una estructura adaptada para tal fin y que se encuentra suspendida de las cuerdas del parapente.
El dispositivo para la estabilización propuesto consta también de tres elementos estructurales nuevos respecto de los paramotores tradicionales encargados de favorecer la estabilidad del dispositivo mediante la correcta…
SISTEMA DE CONTROL DE AERONAVES NO TRIPULADAS DE ALA ROTATORIA PARA ATERRIZAJE VERTICAL EN SUPERFICIES MÓVILES MEDIANTE PRE-ALIMENTACION DE FUERZAS EN EL SISTEMA DE CONTROL.
(03/07/2014). Ver ilustración. Solicitante/s: UNIVERSIDAD PABLO DE OLAVIDE. Inventor/es: OLLERO BATURONE,ANIBAL, JIMENEZ, ANTONIO, DE LOS SANTOS TRIGO,Silvia, ALARCÓN ROMERO,Francisco, BEJAR DOMINGUEZ,Manuel, SANDINO VELAZQUEZ,Luis Alberto, SANTAMARIA RUBIO,Daniel, VIGURIA JIMENEZ,Luis Antidio, ALBO SANCHEZ-BEDOYA,Carlos, ANDERSON BELL SEILER,Allan, GIL MONTAÑO,Pablo.
Mejora del sistema de control para el aterrizaje de una aeronave VTOL no tripulada sobre una plataforma móvil, consistente en la adición de un sistema de control basado en unos sensores, que miden la tensión del cable que une la aeronave con la plataforma de aterrizaje y los ángulos de orientación de dicho cable con respecto a un sistema asociado a la aeronave, y un módulo de control que toma como entradas la tensión ¿tanto en magnitud como en dirección-, obtenida de los citados sensores, además de las consignas de control generadas por el controlador de la aeronave. El módulo de control objeto de la invención calcula, a partir de la tensión en el cable, correcciones a introducir en las consignas de control, que se adelantan a las perturbaciones que se producirán en la posición de la aeronave como consecuencia de los cambios en la tensión del cable.
Métodos y aparatos para mover un vehículo hacia arriba o hacia abajo por una superficie inclinada.
(23/04/2014) Sistema para mover con seguridad un vehículo hacia arriba o hacia abajo por una superficie inclinada mientras está en un modo de funcionamiento de superficie inclinada, que comprende:
al menos un elemento de contacto con el suelo para mover el vehículo por la superficie inclinada ;
un sistema de propulsión que proporciona una cantidad de par al al menos un elemento de contacto con el suelo para evitar que el vehículo se mueva de manera incontrolable hacia abajo por la superficie inclinada mientras está en el modo de funcionamiento de superficie inclinada, en el que el sistema de propulsión incluye:
un motor de accionamiento acoplado al al menos un elemento de contacto con el suelo; y
un controlador de motor acoplado al motor de accionamiento para controlar una velocidad de árbol de motor de accionamiento y…
SISTEMA COMPACTO DE GENERACION Y CONTROL DE MOMENTOS DE FUERZA CON DIRECCION CONSTANTE.
(02/07/2013) Sistema de actuadores giroscópicos dispuestos de forma que uno de los giróscopos gira dentro de la envolvente de movimiento del otro, permitiendo una reducción sustancial del volumen necesario para conseguir un momento de fuerza determinado con una dirección constante.
Vuelo autónomo para plataformas de vuelo.
(14/03/2013) Un sistema para un vuelo autónomo o semiautónomo de una plataforma de vuelo con accionamientos del vuelo,el sistema comprendiendo un subsistema de estabilización para controlar los accionamientos del vuelo paramantener la estabilización de la plataforma de vuelo en vuelo y un subsistema de control del vuelo para controlar losaccionamientos del vuelo para implantar el control del vuelo de la plataforma de vuelo en vuelo, los dos subsistemasfuncionando separadamente, caracterizado por el hecho de que el subsistema de control del vuelo es anulado por elsubsistema de estabilización en un acontecimiento en el que la plataforma de vuelo exceda de un umbral deestabilización previamente determinado hasta…
Limitación de velocidad en vehículos eléctricos.
(04/02/2013) Procedimiento para el control de la velocidad de un vehículo que tiene un dispositivo de impulsión mediantemotor eléctrico, cuyo procedimiento comprende:
determinar una señal de par en régimen estable y una señal de par en aceleración o desaceleración delvehículo en desplazamiento de descenso en una superficie con pendiente; y
controlar la velocidad del vehículo cuando se desplaza en descenso de la superficie en pendiente y cuandola corriente de regeneración medida del accionador supera un umbral, siendo generada la corriente delaccionador por un dispositivo de accionamiento a motor del vehículo que aplica par, como mínimo, a unelemento de contacto con el suelo del vehículo para el frenado;
en…
{kind=link}
{kind=link}