Vuelo autónomo para plataformas de vuelo.
Un sistema para un vuelo autónomo o semiautónomo de una plataforma de vuelo con accionamientos del vuelo,
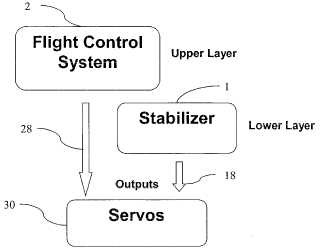
el sistema comprendiendo un subsistema de estabilización para controlar los accionamientos del vuelo paramantener la estabilización de la plataforma de vuelo en vuelo y un subsistema de control del vuelo para controlar losaccionamientos del vuelo para implantar el control del vuelo de la plataforma de vuelo en vuelo, los dos subsistemasfuncionando separadamente, caracterizado por el hecho de que el subsistema de control del vuelo es anulado por elsubsistema de estabilización en un acontecimiento en el que la plataforma de vuelo exceda de un umbral deestabilización previamente determinado hasta que la plataforma de vuelo vuelva a ganar la estabilidad.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IL2005/001026.
Solicitante: Steadicopter Ltd.
Nacionalidad solicitante: Israel.
Dirección: P.O. Box 567 20692 Yoqneam lillit ISRAEL.
Inventor/es: SEGAL,TUVIA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C13/18 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 13/00 Sistemas de control o sistemas de transmisión para la actuación de superficies de control de vuelo, flaps hipersustentadores, aerofrenos, o desprendedores de capa límite (spoilers). › utilizando piloto automático (pilotos automáticos en sí G05D 1/00).
- B64C13/50 B64C 13/00 […] › que utilizan energía eléctrica.
- B64C39/02 B64C […] › B64C 39/00 Aeronaves no previstas en otro lugar. › caracterizadas por un uso especial.
- G05D1/08 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
- G05D1/10 G05D 1/00 […] › Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
PDF original: ES-2398165_T3.pdf
Fragmento de la descripción:
Vuelo autónomo para plataformas de vuelo
CAMPO DE LA INVENCIÓN
La presente invención se refiere al control y la estabilización del vuelo. Más particularmente se refiere a proporcionar capacidades de vuelo autónomo completo o parcial a plataformas de vuelo.
ANTECEDENTES DE LA INVENCIÓN
Para un vuelo autónomo con éxito, una plataforma de vuelo debe ser capaz de mantener la estabilidad mientras lleva a cabo un plan de vuelo. Esto significa todas las tareas del vuelo tales como: despegue, vuelo estacionario, vuelo en una ruta definida y aterrizaje. Los parámetros físicos del vuelo tales como: posición, velocidad, aceleración o más específicamente: altitud, vertical (eje z) , velocidad o aceleración de ascenso o descenso, posición horizontal
(ejes x, y) , velocidad o aceleración. Esta capacidad es particularmente difícil de lograr para plataformas de vuelo relativamente inestables, tales como helicópteros modelos de corta escala o bien otros vehículos de despegue y aterrizaje vertical (VTOL) .
Además de la inestabilidad inherente de la plataforma, es difícil calcular los niveles de los valores de salida correctos 20 a los servos/accionamientos que gobiernan la plataforma a fin de controlar y conseguir los parámetros de vuelo requeridos. Esta dificultad está causada por el hecho de que:
-las plataformas no estables, especialmente las plataformas de corta escala son muy sensibles a cualquier
cambio en la condición de estabilización incluso un pequeño cambio durante un periodo muy corto en la salida, o en 25 un factor medioambiental tal como la velocidad del viento, puede causar una condición no estable inmediata,
-la entrada a partir de los sensores con respecto a las condiciones de vuelo de la plataforma que se utilizan para calcular las salidas y la propia señal de salida, no siempre son suficientemente precisas, o pueden tener un tiempo de respuesta o un tiempo de actualización (frecuencia) insuficiente, especialmente con sensores de baja
frecuencia (tamaño pequeño, bajo peso y coste) ,
-la gama de salida o la resolución y la precisión del servo o del accionamiento puede ser relativamente estrecha, especialmente en plataformas de corta escala, las cuales son muy sensibles a cambios incluso muy pequeños en la salida, y
-existe un desfase (retraso entre la salida y la respuesta real de la plataforma) , la cantidad del desfase estando sujeta a los parámetros del vuelo y la naturaleza de la plataforma.
La presente invención proporciona un sistema (y un procedimiento) para vuelo autónomo (o semiautónomo) estable de plataformas de vuelo no estables. La mayoría de las plataformas de alas fijas están diseñadas para mantener la estabilidad durante el vuelo y mantendrán su condición de vuelo en todos los seis ejes con una mínima corrección del piloto. Las plataformas no estables, tales como las alas giratorias, no pueden mantener su condición de vuelo y sin un pilotaje activo volcarán inmediatamente, especialmente durante el vuelo estacionario. Este problema se exacerba en las plataformas no estables de corta escala. El documento US 3549108 describe el preámbulo de la 45 reivindicación 1.
Mientras la presente invención es particularmente ventajosa para plataformas de vuelo no estables, también se puede aplicar para mejorar el vuelo de plataformas de vuelo inherentemente estables.
La invención introduce las siguientes innovaciones.
-El sistema de estabilización y el sistema de control del vuelo están separados y funcionan de forma cooperativa uno con el otro.
-El sistema de estabilización puede tener un ajuste dinámico del parámetro que ajuste los parámetros de estabilización de acuerdo con las condiciones climáticas o los cambios en el peso de la plataforma, mejorando de ese modo la flexibilidad (amplitud) de la plataforma y el tiempo requerido para recuperar el tiempo de estabilidad de la plataforma.
-En lugar de una señal de salida de control incremental individual, el sistema proporciona en cada ciclo un grupo de salidas. La longitud y magnitud del ciclo de salida a los servos/accionamientos está modulada.
-Si ocurre una condición de no estabilidad extrema, el sistema de control del vuelo se desacopla de la
plataforma hasta que el sistema de estabilización vuelve a ganar una estabilidad aceptable. 65
-En el caso de un fallo temporal o importante en el sistema de control del vuelo, el sistema de estabilización mantendrá la plataforma equilibrada hasta la recuperación o realizará un aterrizaje de autorrotación de emergencia.
-Un usuario tiene la opción de anular temporalmente el sistema de control del vuelo con los mandos de vuelo manual o seleccionar el modo semiautomático para un funcionamiento continuo con los mandos de vuelo manual.
Estas innovaciones se describen ahora con más detalle.
La presente invención comprende un sistema de estabilización ajustable subyacente que proporciona la estabilización aerodinámica básica de la plataforma. La invención adicionalmente comprende un sistema de control del vuelo encima del sistema de estabilización para controlar diversos parámetros del vuelo y la navegación. Este sistema (y el procedimiento correspondiente) supera el problema de controlar el vuelo de plataformas no estables (y mejora el vuelo de las plataformas estables) .
La invención adicionalmente proporciona una modificación dinámica del parámetro de estabilización a fin de adaptar el comportamiento, la flexibilidad y el tiempo de recuperación de la estabilización de la plataforma dinámicamente según los cambios en las condiciones externas tales como la magnitud y la dirección del viento o los cambios en el peso de la plataforma. Estos parámetros externos son supervisados, evaluados y si es necesario modificados para mantener la flexibilidad y el tiempo de recuperación requeridos de la plataforma.
La invención adicionalmente proporciona un procedimiento de salida cíclico único para el control de los parámetros de vuelo requeridos a través de los servos/accionamientos de la plataforma, el cual controla los parámetros de vuelo de la plataforma (en el caso de plataformas de ala giratoria, este control se expresa en el paso de la pala, el ángulo del plano de giro y el paso del rotor de cola) . El procedimiento de salida cíclico implica la modulación de la longitud del ciclo y la magnitud de las salidas a los servos/accionamientos de tal modo que, en lugar de una salida incremental individual calculada por el algoritmo de control, la salida comprende un grupo (un ciclo) de una o más salidas con una magnitud mayor que la salida calculada y seguida por una o más salidas de magnitud menor que la salida calculada, las magnitudes menores son una función de las salidas mayores. Esto supera el problema de la precisión de la señal de salida y el tiempo de desfase de respuesta requerido para un control apropiado de los diversos parámetros del vuelo. Este procedimiento innovador único puede ser implantado, utilizando diversos algoritmos de control básicos tales como control proporcional, integral y diferencial (PID) o un algoritmo de control de lógica difusa, como una capa intermedia entre las salidas calculadas del algoritmo de control básico y las salidas reales a los servos/accionamientos.
La invención adicionalmente proporciona el desacoplamiento del sistema de control del vuelo si un acontecimiento no estable extremo es detectado por el sistema de desacoplamiento. En ese acontecimiento, el sistema de control es computado al modo neutro durante tanto tiempo como sea requerido hasta que el sistema de estabilización recupere la plataforma a un estado de estabilidad aceptable. Después de la recuperación, el sistema de control del vuelo se vuelve a acoplar automáticamente.
La invención adicionalmente proporciona un nivel más elevado de seguridad de funcionamiento debido a la arquitectura de la invención de dos sistemas separados. En caso de un fallo temporal o importante del sistema de control del vuelo, uno de sus componentes, o sensores tales como un GPS (sistema de navegación global) , el sistema de estabilización mantendrá la plataforma equilibrada hasta la recuperación o realizará un aterrizaje de autorrotación de emergencia.
La invención adicionalmente proporciona al usuario una interfaz de control remoto al sistema de control del vuelo, que permite al usuario poner la plataforma en un modo semiautomático. En el modo semiautomático el sistema de control del vuelo recibe sus parámetros de vuelo en tiempo real desde los mandatos del usuario en lugar de desde el plan de vuelo previamente programado. En este modo incluso un usuario no experto puede pilotar la nave... [Seguir leyendo]
Reivindicaciones:
1. Un sistema para un vuelo autónomo o semiautónomo de una plataforma de vuelo con accionamientos del vuelo, el sistema comprendiendo un subsistema de estabilización para controlar los accionamientos del vuelo para mantener la estabilización de la plataforma de vuelo en vuelo y un subsistema de control del vuelo para controlar los accionamientos del vuelo para implantar el control del vuelo de la plataforma de vuelo en vuelo, los dos subsistemas funcionando separadamente, caracterizado por el hecho de que el subsistema de control del vuelo es anulado por el subsistema de estabilización en un acontecimiento en el que la plataforma de vuelo exceda de un umbral de estabilización previamente determinado hasta que la plataforma de vuelo vuelva a ganar la estabilidad.
2. El sistema de la reivindicación 1 en el que el subsistema de estabilización comprende sensores de medición de la estabilidad, los sensores proporcionando una entrada a un conjunto de procesamiento de control de la estabilización que implanta un algoritmo de control de la estabilización, el conjunto de procesamiento de control de la estabilización proporcionando salidas de estabilización a los accionamientos del vuelo de la plataforma de vuelo.
3. El sistema de la reivindicación 2 en el que se utiliza un conjunto de parámetros de auto ajuste del algoritmo de control de la estabilización.
4. El sistema de la reivindicación 2 en el que se utiliza un conjunto de parámetros previamente establecidos del 20 algoritmo de control de la estabilización.
5. El sistema de la reivindicación 1 en el que el subsistema de control del vuelo comprende sensores del vuelo que miden los parámetros del vuelo, los sensores del vuelo proporcionando una entrada a un conjunto de procesamiento de control del vuelo que implanta un algoritmo de control del vuelo, el conjunto de procesamiento de control del
vuelo proporcionando salidas de control del vuelo a los accionamientos del vuelo de la plataforma de vuelo.
6. El sistema de la reivindicación 5 en el que el algoritmo de control del vuelo calcula las magnitudes requeridas de las salidas de control del vuelo y produce, para cada magnitud requerida, un grupo de salidas que comprende por lo menos una de una pluralidad de salidas de magnitudes mayores que la magnitud requerida y por lo menos una de una pluralidad de salidas de magnitudes menores que la magnitud requerida.
7. El sistema de la reivindicación 6 en el que, en por lo menos algunos de los grupos de salidas, dicha por lo menos una de una pluralidad de salidas de magnitudes mayores precede a dicha por lo menos una de una pluralidad de salidas de magnitudes menores.
8. El sistema de la reivindicación 6 en el que las magnitudes de las salidas menores están relacionadas mediante una función con las magnitudes de las salidas mayores.
9. El sistema de la reivindicación 6 en el que el número total de salidas por grupo es constante. 40
10. El sistema de la reivindicación 6 en el que el número total de salidas por grupo de magnitudes mayores es constante.
11. El sistema de la reivindicación 6 en el que el número total de salidas por grupo de magnitudes menores es 45 constante.
12. El sistema de la reivindicación 1 en el que, en el momento en el que ocurre un fallo previamente definido en el subsistema de control del vuelo, el subsistema de estabilización mantiene la plataforma de vuelo equilibrada hasta que el subsistema de control del vuelo se recupera.
13. El sistema de la reivindicación 12 en el que el subsistema de estabilización mantiene la estabilización de la plataforma de vuelo hasta que el subsistema de control del vuelo realiza un aterrizaje de emergencia.
14. El sistema de la reivindicación 1 adicionalmente provisto de una estación de tierra en comunicación con el
subsistema de control del vuelo, por lo que un operario puede anular el sistema de control del vuelo con mandatos manuales del vuelo.
15. Un procedimiento para un vuelo autónomo o semiautónomo de una plataforma de vuelo con accionamientos del vuelo, el procedimiento comprendiendo:
proporcionar un subsistema de estabilización para controlar los accionamientos del vuelo y un subsistema de control del vuelo para controlar los accionamientos del vuelo, los dos subsistemas funcionando separadamente,
caracterizado por las siguientes etapas de mantenimiento de la estabilización de la plataforma de vuelo en vuelo 65 mediante el control de los accionamientos del vuelo utilizando el subsistema de estabilización y la implantación del control del vuelo de la plataforma de vuelo en vuelo mediante el control de los accionamientos del vuelo utilizando la ejecución del control del vuelo del subsistema de control del vuelo, la anulación del subsistema de control del vuelo por el subsistema de estabilización en un acontecimiento en el que la plataforma de vuelo exceda de un umbral de estabilización previamente determinado hasta que la plataforma de vuelo vuelva a ganar estabilidad.
16. El procedimiento de la reivindicación 15 en el que el mantenimiento de la estabilización se consigue utilizando un algoritmo de control de la estabilización con un conjunto de parámetros de auto ajuste.
17. El procedimiento de la reivindicación 15 en el que el mantenimiento de la estabilización se consigue utilizando un 10 algoritmo de control de la estabilización con un conjunto de parámetros previamente establecidos.
18. El procedimiento de la reivindicación 15 en el que la implantación del control del vuelo se lleva a cabo utilizando un algoritmo de control del vuelo que genera salidas de control del vuelo.
19. El procedimiento de la reivindicación 18 en el que el algoritmo de control del vuelo calcula las magnitudes requeridas de las salidas de control del vuelo y produce, para cada magnitud requerida, un grupo de salidas que comprende por lo menos una de una pluralidad de salidas de magnitudes mayores que la magnitud requerida y por lo menos una de una pluralidad de salidas de magnitudes menores que la magnitud requerida.
20. El procedimiento de la reivindicación 19 en el que, en por lo menos algunos de los grupos de salidas, dicha por lo menos una de una pluralidad de salidas de magnitudes mayores precede a dicha por lo menos una de una pluralidad de salidas de magnitudes menores.
21. El procedimiento de la reivindicación 19 en el que las magnitudes de las salidas menores están relacionadas 25 mediante una función con las magnitudes de las salidas mayores.
22. El procedimiento de la reivindicación 19 en el que el número total de salidas por grupo es constante.
23. El procedimiento de la reivindicación 19 en el que el número total de salidas por grupo de magnitudes mayores 30 es constante.
24. El procedimiento de la reivindicación 19 en el que el número total de salidas por grupo de magnitudes menores es constante.
25. El procedimiento de la reivindicación 15 en el que, en el momento en el que ocurre un fallo previamente definido en el subsistema de control del vuelo, la estabilización es mantenida por el subsistema de estabilización hasta que el subsistema de control del vuelo se recupera.
26. El procedimiento de la reivindicación 25 en el que la estabilización es mantenida por el subsistema de 40 estabilización hasta que el subsistema de control del vuelo realiza un aterrizaje de emergencia.
F IURA5
Sistema de Capa superior control del
vuelo Estabilizado y control vuelo OK?
Sí Estabilizador Capa básica Salidas Salidas posición proceso de fallo Salidas Servos/Accionamientos
Patentes similares o relacionadas:
Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático, del 11 de Marzo de 2020, de SCHOTTEL GMBH: Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático alrededor del eje longitudinal (L) del mismo, en el que el vehículo acuático presenta […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Filtro de Kalman modificado para la generación de correcciones de error de actitud, del 5 de Junio de 2019, de THE BOEING COMPANY: Medio de almacenamiento legible por ordenador que comprende instrucciones ejecutables por ordenador que, cuando se ejecutan por un ordenador , provocan que el ordenador: […]
Sistema de formación de imágenes espaciales en tres dimensiones, del 3 de Junio de 2019, de THALES: Sistema de formación de imágenes espaciales en tres dimensiones que comprende: - al menos dos satélites (Sat1, Sat2) en órbita geocéntrica en un mismo […]
 Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Métodos y aparatos de notificación de una asimetría de vuelo que influye en una aeronave, del 15 de Mayo de 2019, de THE BOEING COMPANY: Un método, que comprende: monitorizar una característica de balanceo de una aeronave ; determinar una salida de un sistema de piloto automático […]
Piloto automático de vehículo volador, del 24 de Abril de 2019, de THE BOEING COMPANY: Un metodo implementado por ordenador para controlar un vehiculo volador, que comprende: recibir, por un piloto automatico (218A) del vehiculo […]