CIP-2021 : G05D 1/08 : Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/08[1] › Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/08 · Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA DE APROXIMACION A UNA PLATAFORMA DE UN VEHICULO NO TRIPULADO MEDIANTE ANALISIS VISUAL.
(14/09/2012) Sistema de aproximación a una plataforma de un vehículo no tripulado mediante análisis visual.
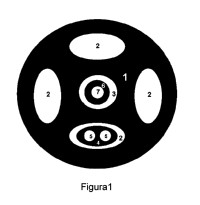
Se reivindica un dispositivo y un sistema de aterrizaje/despegue de vehículos aéreos no tripulados o de atraque/partida de vehículos marinos no tripulados utilizando métodos de análisis visual. La solución consiste en el diseño de plataforma que contiene una figura geométrica de características inusuales. La imagen de esta plataforma se obtiene mediante una cámara digital, situada en el vehículo no tripulado y conectada a un dispositivo dotado con técnicas de tratamiento de imágenes, lo que permite conocer la orientación y posición relativas entre el…
SISTEMA DE APROXIMACIÓN A UNA PLATAFORMA DE UN VEHÍCULO NO TRIPULADO MEDIANTE ANÁLISIS VISUAL.
(28/06/2012). Ver ilustración. Solicitante/s: UNIVERSIDAD COMPLUTENSE DE MADRID. Inventor/es: CRUZ GARCIA,Jesús Manuel de la, SÁNCHEZ BENITEZ,David, PAJARES MARTINSANZ,Gonzalo.
Se reivindica un dispositivo y un sistema de aterrizaje/despegue de vehículos aéreos no tripulados o de atraque/partida de vehículos marinos no tripulados utilizando métodos de análisis visual. La solución consiste en el diseño de plataforma que contiene una figura geométrica de características inusuales. La imagen de esta plataforma se obtiene mediante una cámara digital, situada en el vehículo no tripulado y conectada a un dispositivo dotado con técnicas de tratamiento de imágenes, lo que permite conocer la orientación y posición relativas entre el vehículo y la plataforma con la figura que se reivindica.
Control adaptable para un sistema de refrigeración que usa un compresor de espiral de ciclo de trabajo modulado en anchura de pulso.
(23/05/2012) Sistema de refrigeración que comprende, una caja de refrigeración ;
un evaporador dispuesto en dicha caja ;
un condensador y compresor emparejados en comunicación de fluidos con dicho evaporador ;
estando dicho condensador dispuesto en dicha caja y provisto de unos medios para transferir calor (H) al ambiente;
siendo dicho compresor un compresor de capacidad variable modulado en anchura de pulso;
un sensor de temperatura dispuesto en dicha caja y configurado para detectar una temperatura real dentro de dicha caja de refrigeración ; y
un controlador que reacciona ante dicho…
Procedimiento de caracterización de las vibraciones para un satélite de observación.
(04/05/2012) Procedimiento de caracterización de las vibraciones que afectan a un satélite de observación equipado con un sistema generador de imágenes que tiene un eje de puntería (Z) y con un sistema de actitud que permite orientar el eje de puntería (Z) del sistema generador de imágenes, caracterizado porque comprende las etapas que consisten en:
- seleccionar una estrella en una lista de estrellas observables por medio del sistema generador de imágenes;
- extraer una primera y una segunda coordenada (X0, Y0) de la estrella seleccionada según una primera y una segunda dirección (X, Y);
- orientar el satélite por medio del sistema de actitud de manera que el eje de puntería (Z)…
SISTEMA PARA CONTROLAR LA OPERACIÓN DE UNA AERONAVE CONVERTIBLE ENTRE MODOS HELICÓPTERO, AUTOGIRO Y AVIÓN.
(23/03/2012) Sistema para controlar la operación de una aeronave convertible entre modos helicóptero, autogiro y avión.
Sistema para controlar la operación de una aeronave convertible entre modos helicóptero, autogiro y avión. El sistema está dotado de un control de vuelo activo "multimodo" (CAVM) , que comprende un dispositivo de control de configuración , que recibe información de los sensores de todas y cada una de las superficies de control y potencia , y sobre la posición de los órganos de mando ; un selector del modo de vuelo (FMS), para modificar el modo de vuelo si se verifica ciertas condiciones captadas por dichos sensores , que informa al piloto sobre sí se verifican las condiciones seguras para un cambio de modo; y un computador…
Sistema de estabilización para cuerpos voladores.
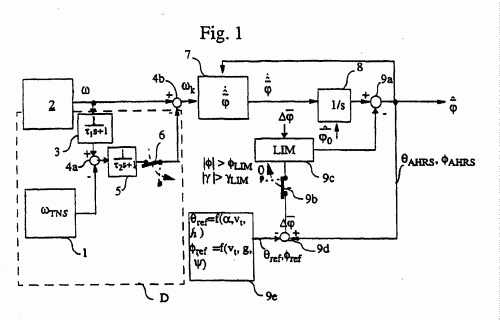
(14/03/2012) Procedimiento de estabilización de un vehículo con un motor propio o diseñado como un cuerpo volador que se puede controlar mecánicamente mediante un circuito de regulación con una comparación entre valor objetivo y valor real y control en al menos uno de los ejes de inclinación en el que
- para medir el movimiento y/o la posición según al menos uno de los seis grados de libertad espaciales se utiliza un sistema de sensores optoelectrónico que registra con ayuda de una óptica de imagen que lleva el vehículo una imagen parcial del entorno visible en la posición actual
- la dirección visual óptica de la imagen con una componente prácticamente vertical está orientada hacia abajo
- se adopta una señal de medición óptica del desplazamiento de…
PROCEDIMIENTO Y DISPOSITIVO DE PILOTAJE DE LA ACTITUD Y DE GUIADO DE UN SATELITE MEDIANTE UN RACIMO DE GIRONDINOS.
(16/05/2007) Procedimiento de pilotaje de la actitud de un satélite que incluye un racimo de por lo menos cuatro accionadores giroscópicos (10a, 10b, 10c, 10d) con ruedas respectivas montadas en cardanes orientables alrededor de ejes paralelos a una u otra de sólo dos direcciones distintas y fijas con relación al satélite, formando así dos grupos de accionadores de los que uno tiene por lo menos dos accionadores, según el cual: - se mide la actitud del satélite por medio de sensores embarcados en el satélite, - se calcula la necesidad de par de comando para efectuar una maniobra de reorientación de la actitud, - se efectúa un cálculo de…
PROCEDIMIENTO DE AYUDA AL DESPEGUE DE UNA AERONAVE.
(01/04/2007) Procedimiento de ayuda al despegue de una aeronave que comporta unos alerones de borde de fuga y unas aletas de borde de ataque , así como un empenaje horizontal regulable al cual están articulados unos timones de profundidad procedimiento según el cual: - se predetermina un valor VR de velocidad de la aeronave, denominada velocidad de rodadura, en la cual debe comenzar la rodadura de despegue, debiendo dicho valor VR encontrarse dentro de una gama de valores de velocidad impuesta por las disposiciones reglamentarias; y - se aplica a dicha aeronave una orden de cabeceo de ayuda al despegue que desvía dicho empenaje horizontal regulable con un ángulo cuyo valor está predeterminado, caracterizado porque: - en dicha gama de valores de velocidad, se elige arbitrariamente una velocidad de referencia VRref y se determina,…
ESTIMACION DE LA POSICION EN UN CUERPO ORIENTABLE USANDO UNA REPRESENTACION DE DATOS MEDIANTE CUATERNION MODIFICADO.
(01/03/2007) Un método de estimación de la posición de un cuerpo orientable incluyendo dicho cuerpo medios detectores de orientación y medios de detección de velocidad angular comprendiendo el método las etapas de: producir información de velocidad angular a partir de dicho medio detector de velocidad angular , y producir información de orientación a partir de dicho medio detector de orientación , caracterizado porque la transformación e integración de dicha información de velocidad angular producida para producir la primera información de posición del cuaternión de manera que dicha primera información del cuaternión está obligada a representar una rotación alrededor de un eje horizontal en el marco de tierra de referencia; procesar dicha información…
PROCEDIMIENTO DE CONTROL DE POSICION Y ESTABILIZACION DE UN SATELITE EN ORBITA BASE POR ACOPLAMIENTO CON EL CAMPO MAGNETICO TERRESTRE.
(01/11/2006) Procedimiento de comando de posición y de estabilización de un satélite en órbita terrestre baja con una pulsación orbital ùo, según el cual se miden las componentes del vector campo magnético terrestre () según los tres ejes de medición de un triedro ligado al satélite , deduciéndose de dichas componentes la orientación del campo magnético terrestre () medido en el triedro y la derivada del vector de dicho campo, y comandándose magneto-acopladores llevados por el satélite a partir de dicha orientación y derivada del campo magnético terrestre () para generar un par de puesta en rotación del satélite en una pulsación (ùc) alrededor de un eje de spin (Zs) determinado del…
PROCEDIMIENTO DE CONTROL DE LA SITUACION DE UN SATELITE EN ORBITA TERRESTRE BAJA.
(01/10/2006). Solicitante/s: EADS ASTRIUM SAS. Inventor/es: LAURENS, PHILIPPE.
Procedimiento para el control de la situación de un satélite situado en una órbita terrestre baja, según el cual: - se crea, con ayuda como mínimo de tres magneto-acopladores , un momento magnético M, caracterizado porque dicho momento magnético M es colineal con lo que sería una dirección de consigna, constituida por la dirección del campo geomagnético en ejes satélites (bo), si éste estuviera direccionado de manera ideal, con la finalidad de alinear de forma permanente la dirección magnética de consigna (bo) con respecto a la dirección magnética corriente (b), y - se controla la posición angular alrededor de la dirección magnética corriente instantánea (b) por un momento cinético.
PROCEDIDMIENTO Y DISPOSITIVO PARA CONTRARRESTAR LAS VIBRACIONES INDUCIDAS EN UNA AERONAVE POR FUNCIONAMIENTO EN MOLINETE DE UN SOPLANTE DE UN TURBORREACTOR.
(01/05/2006) Procedimiento que permite contrarrestar las vibraciones inducidas, en una aeronave equipada con motores (5 a 8) del tipo turborreactor, debido al funcionamiento en molinete de al menos uno de los soplantes de dichos motores, comportando dicha aeronave un sistema de órdenes de vuelo eléctricas que: - genera unas órdenes eléctricas de mando de vuelo (dZ, dY) destinadas a unos servomandos de vuelo (25A, 25B, 26A, 26B) aptos para accionar los timones de dicha aeronave; y - subordina dichos servomandos a dichas órdenes eléctricas de mando de vuelo, limitando el funcionamiento de dichos servomandos a una banda de frecuencias reducida, procedimiento según el cual: - se vigila la aparición de dichas vibraciones inducidas;…
AERONAVE CON MANDOS DE VUELO ELECTRICOS, PROVISTA DE UN FUSELAJE SUSCEPTIBLE DE DEFORMARSE Y DE VIBRAR.
(16/03/2006) Aeronave con mandos de vuelo eléctricos, provista de timones aptos para ser desplazados por unos accionadores (16.1 a 16.n) controlados eléctricamente, la cual comporta: - unos órganos de pilotaje y al menos un ordenador de mandos de vuelo , estando dichos órganos de pilotaje accionados por un piloto y generando las consignas eléctricas de pilotaje, que son dirigidas a dicho ordenador de mandos de vuelo, generando este último ordenador, a partir de dichas consignas eléctricas de pilotaje y de parámetros de pilotaje, las órdenes de mando en balanceo, en cabeceo y en guiñada, que son dirigidas a dichos accionadores…
PROCEDIMIENTO Y DISPOSITIVO DE CONTROL DEL COMPORTAMIENTO DE UN SATELITE.
(01/03/2006) Procedimiento de control del comportamiento de un satélite mediante el gobierno de la velocidad de los cardanes de los girodinos de un grupo de girodinos, que presentan giroscopios respectivos montados sobre cardanes rotativos en una plataforma del satélite, alrededor de ejes de orientaciones diferentes, según el cual: - se determina, a partir de las condiciones iniciales de comportamiento y de velocidad angular del satélite, a partir de las condiciones finales deseadas en términos de comportamiento y de velocidad angular del satélite, y a partir de una duración de tiempo asignada al paso de las condiciones iniciales a las condiciones finales, denominándose este paso maniobra, una configuración de grupo, llamada configuración de referencia, alejada de toda configuración singular de tal modo…
SISTEMA REDUNDANTE PARA INDICAR EL RUMBO Y LA POSICION DE VUELO EN UN AVION.
(01/03/2005). Ver ilustración. Solicitante/s: SAAB AB. Inventor/es: ADEBJIRK, PETER, NORDLUND, PER-JOHAN, CARLSSON, CARL-OLOF.
Método para calcular sintéticamente la posición de vuelo redundante de un avión cuando el rumbo del avión es conocido, con la ayuda de datos existentes en el avión, como las velocidades angulares, p, q, r alrededor de las coordenadas x, y, y z de un sistema de coordenadas fijado al avión (chasis del cuerpo), la información de los datos aerodinámicos en forma de velocidad, altitud y ángulo de ataque, así como la información del rumbo, caracterizado por el hecho de que el método incluye las fases: - cálculo de la posición de vuelo basándose en las velocidades angulares fijadas al avión p, q, r, y - corrección de la posición de vuelo calculada mediante los datos aerodinámicos y de rumbo.
SISTEMA PARA EL ACCIONAMIENTO EN GUIÑADA DE UNA AERONAVE.
(01/12/2004) Sistema para el accionamiento en guiñada de una aeronave provisto de una pluralidad de motores , comportando dicho sistema (SC): - al menos un órgano de accionamiento , para el accionamiento en guiñada, susceptible de ser accionado por un piloto de la aeronave ; - unos primeros medios que emiten unas señales eléctricas representativas respectivamente de la actitud lateral accionada Öc, de la velocidad de balanceo p, de la actitud lateral efectiva Ö, de la velocidad de guiñada r y del derrape lateral â de dicha aeronave ; - una unidad de cálculo que elabora una orden eléctrica dr de accionamiento en guiñada, a partir de la relación: dr=Ka.Öc+Kb.p+Kc.Ö+Kd.r+Ke.â en la que: . Öc, p, Ö, r y â son los valores emitidos por dichos primeros medios, y . Ka, Kb, Kc, Kd y Ke son unas ganancias, cuyos valores son susceptibles…
CONTROL DE ALCANCE DE UN PROYECTIL PROPUYLSADO POR COHETE.
(16/06/2004). Ver ilustración. Solicitante/s: SAAB DYNAMICS AKTIEBOLAG. Inventor/es: KOMSTADIUS, SVEN.
Procedimiento para controlar el alcance de un proyectil propulsado por un motor de cohete, en el cual un valor real de una cantidad, que se correlaciona claramente con la distancia cubierta por el proyectil, se determina de forma continua durante la propulsión, el valor real determinado de esta forma se compara de forma continua con un valor establecido predefinido, caracterizado porque el valor establecido se corresponde con un alcance predeterminado para el proyectil, y porque la capacidad de propulsión del motor de cohete se suprime de forma instantánea, cuando el valor real se encuentra que es al menos igual al valor establecido.
SISTEMA DE CONTROL DE VUELO PARA AERONAVE.
(01/06/2004) Un avión con un sistema de control de vuelo que comprende medios que generan un empuje ascensional aerodinámico, y medios para controlar en uso el empuje ascensional proporcionado por los medios generadores de empuje ascensional, comprendiendo los medios de control de empuje ascensional: - una masa concentrada montada dentro de un cuerpo longitudinal del avión, comprendiendo la masa concentrada al menos una función y/o sistema de avión existente, montados en un soporte en un área confinada, - apoyos (24, 26; 24, 26) que permiten el desplazamiento relativo entre la masa concentrada y al menos una porción de los medios que…
PROCEDIMIENTO DE MANDO DE POSICION DE UN SATELITE EN ORBITA BAJA, CON ADQUISICION SOLAR.
(01/02/2002). Solicitante/s: MATRA MARCONI SPACE FRANCE. Inventor/es: DAMILANO, PATRICE.
PARA CONTROLAR EL COMPORTAMIENTO DE UN SATELITE COLOCADO EN UNA ORBITA BAJA , SE MIDE EL CAMPO MAGNETICO TERRESTRE SEGUN LOS TRES EJES DE UN PUNTO DE REFERENCIA ASOCIADO AL SATELITE, SE DERIVAN LAS MEDICIONES RESPECTO AL TIEMPO, SE MULTIPLICAN LAS DERIVADAS POR UNA GANANCIA Y SE HACE PASAR UNA CORRIENTE REPRESENTATIVA DEL RESULTADO EN MAGNETOACOPLADORES PARA CREAR MOMENTOS MAGNETICOS QUE TIENDEN A MANTENER EL SATELITE EN UNA ORIENTACION INVARIABLE RESPECTO DE LAS LINEAS DE FUERZA DEL CAMPO MAGNETICO TERRESTRE. FUERA DE LOS PERIODOS DE ECLIPSE, SE CONTROL EN CABECEO EL SATELITE POR MODIFICACION DEL MOMENTO DE INERCIA INTERNA EN RESPUESTA A UNA SEÑAL EMITIDA POR UN DETECTOR SOLAR , DE MANERA QUE MANTENGA GENERADORES SOLARES QUE LLEVA ORIENTADOS HACIA EL SOL, PARA LAS ORBITAS QUE LLEVAN NUDOS CERCANOS A MEDIODIA Y A MEDIANOCHE EN HORA LOCAL TERRESTRE.
Procedimiento para la regulación de la inclinación, con relación a la tierra, de una caja de un vagón de un vehículo ferroviario.
(01/09/2001) Procedimiento para la regulación de la inclinación, con relación a la tierra,de la caja del vagón de un vehículo ferroviario con al menos un vagón , cuya caja de vagón se asienta, en cada caso, al menos sobre una suspensión primaria , una suspensión secundaria y un soporte pendular de forma elástica y giratoria alrededor del eje longitudinal, sobre al menos un mecanismo de traslación con al menos una pareja de ruedas , comprendiendo el procedimiento las siguientes etapas: a) determinación de la aceleración centrífuga (aq) en el plano horizontal del primer vagón en la dirección de la marcha, b) provisión de un valor límite superior, dependiente de la situación de la marcha, para la aceleración transversal…
PROCEDIMIENTO ADAPTATIVO DE CONTROL DE POSICION PARA ESTABILIZAR MAGNETICAMENTE UN SATELITE EN AL MENOS BALANCEO-GUIÑADA.
(16/10/1999). Solicitante/s: ALCATEL. Inventor/es: CELERIER, BRUNO, DOUILLET, FRANCIS.
PARA DETERMINAR EL PAR DE CORRECCION A APLICAR MAGNETICAMENTE A UN SATELITE PARA SU CONTROL DE COMPORTAMIENTO AL MENOS UN BALANCEO-GUIÑADA: - SE DETERMINAN LA DIRECCION DEL PLANO DE BALANCEO-GUIÑADA EN LA QUE ES POSIBLE GENERAR UN PAR DE CORRECCION PURAMENTE EN ESTE PLANO, POR INTERACCION DE UN MOMENTO MAGNETICO GENERADO A BORDO, EN EL PLANO DEL EJE DE CABECEO Y DEL CAMPO MAGNETICO TERRESTRE, CON ESTE ULTIMO, - SE UTILIZA UNA LEY DE CONTROL CUYAS GANANCIAS VARIAN EN FUNCION DEL CAMPO MAGNETICO TERRESTRE LOCAL DE MANERA A RESPECTAR TENSIONES PREDETERMINADAS APLICADAS A LOS POLOS DEL SISTEMA.
SISTEMA PARA INHIBIR EL CONTROL DE LA COORDINACION DE VIRAJE PARA UN SISTEMA DE CONTROL DE AVION DE ALAS ROTATIVAS.
(16/11/1998). Solicitante/s: UNITED TECHNOLOGIES CORPORATION. Inventor/es: GOLD, PHILLIP, J., FOGLER, DONALD, L., JR., SKONIECZNY, JOSEPH, KELLER, JAMES, F.
UN SISTEMA INHIBIDOR DE LA COORDINACION DE CURVAS INHIBE UN SISTEMA DE CONTROL DE UN AVION CON ALAS GIRATORIAS DE SU UTILIZACION EN UN MODO DE COORDINACION DE CURVAS AUTOMATICO CUANDO UN PILOTO DESEA REALIZAR UNA MANIOBRA DE DESPLAZAMIENTO HACIA UN LADO, COMO POR EJEMPLO, UN CURVA PLANA. CUANDO LA COORDINACION DE CURVAS AUTOMATICA NO ESTA CONECTADA , POR EJEMPLO, EL AEROPLANO NO ESTA EN UN CURVA COORDINADA, Y O BIEN EL ANGULO DEL BANCO DEL AEROPLANO SUPERA UNA MAGNITUD LIMITE INHIBIDA O BIEN UN MANDO DE DESVIO DEL PILOTO PROVISTO POR UN CONTROLADOR DE BRAZO LATERAL DEL PILOTO EXCEDE UN VALOR LIMITE MINIMO , POR EJEMPLO, EL CONTROLADOR DE BRAZO LATERAL ES INCAPAZ DE FIJARSE EN EL EJE DE DESVIO, LA COORDINACION DE CURVAS AUTOMATICA ES INHIBIDA . LA COORDINACION DE CURVAS AUTOMATICA PERMANECE INHIBIDA HASTA QUE AMBOS EL ANGULO DEL BANCO DEL AEROPLANO CAE POR DEBAJO DE UNA MAGNITUD LIMITE PROGRAMADA Y EL CONTROLADOR DE BRAZO LATERAL VUELVE A SU POSICION DE DETENCION DEL EJE DE DESVIO.
PROCEDIMIENTO Y DISPOSITIVO PARA LA REGULACION DE LA INCLINACION CON RELACION A TIERRA DE UN VEHICULO FERROVIARIO.
(16/02/1998) LA INVENCION SE REFIERE A UN PROCEDIMIENTO PARA LA REGULACION DE LA POSICION CON RELACION A TIERRA EN UN VEHICULO FERROVIARIO CON AL MENOS UN VAGON, CUYA CAJA DE VAGON SE ASIENTA DE FORMA ELASTICA Y OSCILABLE ALREDEDOR DEL EJE LONGITUDINAL SOBRE EL MECANISMO DE DESPLAZAMIENTO CON AL MENOS UN PAR DE RUEDAS, ASI COMO UN DISPOSITIVO PARA ELLO. EL PROCEDIMIENTO DESCRITO TIENE LAS SIGUIENTES ETAPAS: SE DETERMINA LA ACELERACION CENTRIFUGA EN EL PLANO HORIZONTAL, SE CALCULA UN CONJUNTO DE VALORES PARA LA INCLINACION ABSOLUTA DE LA CAJA EN RELACION A TIERRA, CONSIDERADO COMO UN SISTEMA INERCIAL, SE DETERMINA EL VALOR REAL DE LA INCLINACION ABSOLUTA DE LA CAJA EN RELACION A LA TIERRA, CONSIDERADA COMO UN SISTEMA INERCIAL, GENERANDOSE AL MENOS UNA SEÑAL DE REGULACION A PARTIR DE LA DIFERENCIA…
COORDINACION DE VIRAJE A BAJA VELOCIDAD PARA HELICOPTERO.
(16/02/1998). Solicitante/s: UNITED TECHNOLOGIES CORPORATION. Inventor/es: GOLD, PHILLIP, J., FAULL, WALTER, R.
UN SISTEMA DE CONTROL DEL VUELO DE UN HELICOPTERO QUE INCLUYE UNA ARQUITECTURA DE UN SISTEMA DE CONTROL SEGUIDOR DEL MODELISMO QUE PROPORCIONA AUTOMATICAMENTE UNA SEÑAL DE COMANDO DE GUIÑADA DE COORDINACION AL ROTOR DE COLA DEL HELICOPTERO PARA COORDINAR EL VUELO DEL HELICOPTERO DURANTE UN VIRAJE LADEADO A BAJA VELOCIDAD. EL SISTEMA DE CONTROL PROCESA LA INFORMACION PROCEDENTE DE UNA VARIEDAD DE DETECTORES DEL HELICOPTERO PARA EMITIR LA SEÑAL DE COMANDO DE GUIÑADA DE COORDINACION A TRAVES DE UNA LINEA DE SALIDA AL ROTOR DE COLA DEL HELICOPTERO.
MEJORAS EN EL OBJETO DE LA PATENTE 9101455 PRESENTADA EL 18.6.91, RELATIVA A UN "SISTEMA PARA CONTRARRESTAR EL EFECTO DE LA FUERZA CENTRIFUGA EN EL HABITACULO DE VEHICULOS.
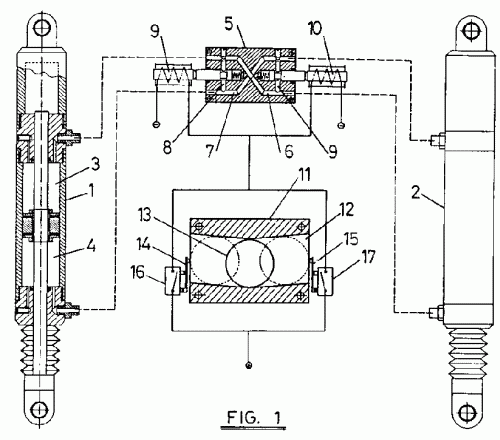
(16/06/1997). Ver ilustración. Solicitante/s: SANTIAGO SABADELL, LUIS.
MEJORAS EN EL OBJETO DE LA PATENTE NUMERO 9101455, PRESENTADA EL 18.6.91, RELATIVA A UN "SISTEMA PARA CONTRARRESTAR EL EFECTO DE LA FUERZA CENTRIFUGA EN EL HABITACULO DE VEHICULOS", CUYO SISTEMA COMPRENDE EL MONTAJE DEL HABITACULO SOBRE EL BASTIDOR O ESTRUCTURA PORTANTE POR INTERMEDIO DE APOYOS REGULABLES. ESTOS APOYOS CONSISTEN EN CILINDROS DE DOBLE EFECTO, CUYAS CAMARAS SE RELACIONAN A TRAVES DE UN DISPOSITIVO DE INTERCOMUNICACION, EL CUAL CONECTA LA CAMARA DE AVANCE DE LOS CILINDROS DE UN LADO DEL VEHICULO CON LA CAMARA DE RETROCESO DE CILINDROS DEL LADO OPUESTO Y VICEVERSA, CUANDO EL VEHICULO DESCRIBE TRAYECTORIAS CURVAS, CONECTANDO ENTRE SI LA CAMARA DE AVANCE Y RETROCESO DE CADA CILINDRO CUANDO EL VEHICULO CIRCULA SEGUN TRAYECTORIAS RECTAS.
SISTEMA PARA CONTROLAR EL GIRO DE UN CUERPO EN UN VEHICULO DE FERROCARRIL ALREDEDOR DE SU EJE LONGITUDINAL.
(01/03/1997) EL SISTEMA DE LA INVENCION COMPRENDE UN GIROSCOPIO QUE TIENE DOS GRADOS DE LIBERTAD FIJADO A UN SOPORTE RODANTE DE UN VEHICULO Y QUE TIENE UN PRIMER EJE DE SENSIBILIDAD DISPUESTO EN LA DIRECCION LONGITUDINAL DEL CARRO RODANTE Y UN SEGUNDO EJE DE SENSIBILIDAD DISPUESTO EN LA DIRECCION VERTICAL; EL GIROSCOPIO ES ACCIONABLE PARA GENERAR UNA PRIMERA SEÑAL INDICATIVA DE LA VELOCIDAD ANGULAR (OMEGA) SUB X ALREDEDOR DE UN PRIMER EJE DISPUESTO EN DICHA DIRECCION LONGITUDINAL Y UNA SEGUNDA SEÑAL INDICATIVA DE LA VELOCIDAD ANGULAR (OMEGA) SUB Z DEL SOPORTE RODANTE ALREDEDOR DE UN SEGUNDO EJE VERTICAL; EL SISTEMA INCLUYE…
COORDINACION DE VIRAJE A ALTA VELOCIDAD PARA AVION DE ALA ROTATIVA.
(01/02/1996). Solicitante/s: UNITED TECHNOLOGIES CORPORATION. Inventor/es: FOGLER, DONALD, L., JR., DRYFOOS, JAMES, B., KELLER, JAMES, F., SKONIECZNY, JOSEPH, P., GOLD, PHILIPP, J.
UN SISTEMA DE CONTROL DEL VUELO DE UN HELICOPTERO QUE INCLUYE UNA ARQUITECTURA DE UN SISTEMA DE CONTROL SEGUIDOR DEL MODELISMO QUE PROPORCIONA AUTOMATICAMENTE UNA SEÑAL DE COMANDO DE GUIÑADA DE COORDINACION AL ROTOR DE COLA DEL HELICOPTERO PARA COORDINAR EL VUELO DEL HELICOPTERO DURANTE UN VIRAJE LADEADO. EL SISTEMA DE CONTROL PROCESA LA INFORMACION PROCEDENTE DE UNA VARIEDAD DE DETECTORES DEL HELICOPTERO PARA EMITIR LA SEÑAL DE COMANDO DE GUIÑADA DE COORDINACION A TRAVES DE UNA LINEA DE SALIDA AL ROTOR DE COLA DEL HELICOPTERO.
SISTEMA DE COMANDOS DE VELOCIDAD QUE SIGUE UN MODELO DE BAJA VELOCIDAD PARA AERONAVE DE ALAS GIRATORIAS.
(16/12/1995). Solicitante/s: UNITED TECHNOLOGIES CORPORATION. Inventor/es: GOLD, PHILLIP, J., FOGLER, DONALD, L., JR., RICHARD, JAMES, L., GLUSMAN, STEVEN, I.
UN ALGORITMO DE MODELISMO DE VELOCIDAD QUE RESPECTO A UNA SEÑAL DE COMANDO DE POSICION EN VUELO DEL PILOTO, UNOS DETECTORES DE LOS PARAMETROS DE VUELO Y UN ALGORITMO DEL MODELISMO DEL VEHICULO INVERSO PROPORCIONAN SEÑALES AL COMANDO DE VUELO DE UNA AERONAVE DE ALAS ROTATIVAS PARA OBTENER LA RESPUESTA AERODINAMICA AL COMANDO DEL PILOTO.
SISTEMA DE ESTABILIZACION MECANICA DE CONTRA-ROTACION DE ROTORES EMBUTIDOS.
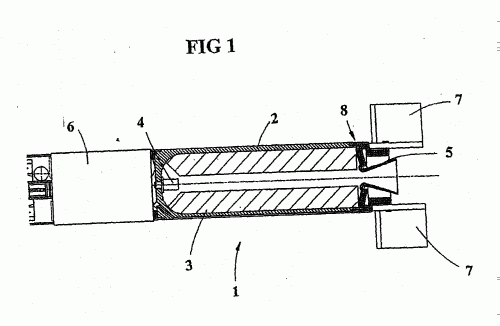
(01/08/1995). Solicitante/s: SOCIETE EUROPEENNE DE PROPULSION. Inventor/es: ATLAS, GERARD.
EL SISTEMA DE ESTABILIZACION MECANICA DE UN SOPORTE CONSTA DE UNROTOR UTIL MONTADO EN EL SOPORTE MEDIANTE COJINETES Y SOLIDARIO DE UN ORGANO UTIL AL MENOS UNO DE CUYOS PARAMETROS ASOCIADO A LA ROTACION DEL ROTOR UTIL ES VARIABLE EN FUNCION DEL TIEMPO, UN ROTOR ANTAGONISTA CONCENTRICO AL ROTOR UTIL , MONTADO EN EL ROTOR UTIL MEDIANTE COJINETES Y SOLIDARIO DE UN ORGANO DE INERCIA ANTAGONISTA , UN PRIMER MOTOR ELECTRICO RETROALIMENTADO INTERPUESTO ENTRE EL ROTOR UTIL Y EL ROTOR ANTAGONISTA Y QUE PROPORCIONA EL ARRASTRE ENROTACION EN SENTIDOS INVERSOS DEL ROTOR UTIL Y DEL ROTOR ANTAGONISTA , Y UN SEGUNDO MOTOR ELECTRICO DE POCA POTENCIA INTERPUESTO ENTRE EL ROTOR UTIL Y ELSOPORTE , RETROALIMENTADO DE FORMA QUE PROPORCIONE UN REPOSICIONAMIENTO DEL ROTOR ANTAGONISTA Y CORRIJA LAS DERIVAS INTRODUCIDAS EN EL MOVIMIENTO CORRECTOR DEL ROTOR ANTAGONISTA EN ESPECIAL POR LOS ROZAMIENTOS DE LOS COJINETES.
PROCESO DE READQUISICION DE COMPORTAMIENTO POR RECONOCIMIENTO DE ESTRELLA PARA SATELITE ESTABILIZADO DE TRES EJES.
(01/06/1995) PARA LA READQUISICION DEL COMPORTAMIENTO DE UN SATELITE TOTAL O PARCIALMENTE ESTABILIZADO DE TRES EJES, SE PRUEBA SI UN DETECTOR TERRESTRE DETECTA LA TIERRA (PRUEBA 1) Y SI UN DETECTOR DE ESTRELLA DETECTA UNA ESTRELLA DE MAGNITUD AL MENOS APROXIMADAMENTE IGUAL A LA DE UNA ESTRELLA DE REFERENCIA DADA (PRUEBA 2): * CASO A: SI LAS PRUEBAS 1 Y 2 SON POSITIVAS, SE DETECTA LA TIERRA Y DICHA ESTRELLA, Y SE PRUEBA LA COHERENCIA DURANTE EL TIEMPO DE LA INFORMACION DE ROLLIDO POR LOS DETECTORES DE TIERRA Y DE ESTRELLA: EN CASO DE INCOHERENCIA SE PASA AL CASO B; * CASO B: SI SOLO LA PRUEBA 1 ES POSITIVA, SE DETECTA LA TIERRA Y SE CONTROLA EN ROTACION EN GUIÑADA DEL SATELITE HASTA LA VERIFICACION DE LA PRUEBA 2; SE DETECTA DICHA ESTRELLA Y SE PROCEDE A LA PRUEBA DE COHERENCIA PREVISTA EN EL CASO A; * CASOS C Y D: SI LA PRUEBA 1 ES NEGATIVA, SE…
SISTEMA QUE INCLUYE UN PILOTO AUTOMATICO CON UN SIMULADOR PARA SUBMARINO.
(01/02/1995) SISTEMA (FIG. 1) QUE TIENE UN PILOTO AUTOMATICO, CON UN SIMULADOR Y PARA UN SUBMARINO, QUE INCLUYE UNA PARTE FISICA , CON ELEMENTOS QUE REPRESENTAN LA DINAMICA EN RELACION A VARIABLES DE ESTADO, PARA LA OBTENCION DE UNA PROFUNDIDAD ESTABLECIDA, SIENDO AFECTADA ASIMISMO LA DINAMICA POR FUERZAS PERTURBADORAS EXTERNAS, Y UN ELEMENTO DE MEDICION QUE PROPORCIONA SEÑALES CADA UNA DE LAS CUALES REPRESENTA LOS VALORES OBSERVADOS DE LAS VARIABLES DE OBSERVACION. EL SIMULADOR, O ESTIMADOR DE ESTADO , PROPORCIONA SEÑALES CADA UNA DE LAS CUALES REPRESENTA LOS VALORES ESTIMADOS DE LAS VARIABLES DE ESTADO, Y SE CONSIDERA QUE ESTA CONECTADO AL ELEMENTO DE MEDICION …
SISTEMA DE ESTABILIZACION MECANICA DE CONTRA-ROTACION DE ROTORES SEPARADOS.
(16/10/1994) EL SISTEMA DE ESTABILIZACION DE UN SOPORTE A ESTABILIZAR CONSTA DE UN ROTOR UTIL MONTADO EN SOPORTE MEDIANTE UNOS COJINETES Y SOLIDARIO DE UN ORGANO UTIL , AL MENOS UNO DE CUYOS PARAMETROS ASOCIADO A LA ROTACION DEL ROTOR UTIL ES VARIABLE EN FUNCION DEL TIEMPO, UN PRIMER MOTOR ELECTRICO RETROALIMENTADO INTERPUESTO ENTRE EL SOPORTE Y EL ROTOR UTIL PARA PROPORCIONAR EL ARRASTRE EN ROTACION DEL ROTOR UTIL EN UN PRIMER SENTIDO, UN ROTOR ANTAGONISTA QUE ESTA MONTADO SOBRE EL SOPORTE MEDIANTE UNOS COJINETES INDEPENDIENTEMENTE DEL ROTOR UTIL AUNQUE COAXIAL AL MISMO, Y QUE SOPORTA UN ORGANO DE INERCIA ANTAGONISTA , Y UN SEGUNDO MOTOR ELECTRICO RETROALIMENTADO INTERPUESTO ENTRE EL ROTOR ANTAGONISTA Y EL SOPORTE PARA ARRASTRAR AL ROTOR ANTAGONISTA EN SENTIDO INVERSO AL ROTOR UTIL…
{kind=link}
{kind=link}
{kind=link}
{kind=link}