CIP-2021 : G05D 1/02 : Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/02[1] › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/02 · Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP2021: Invenciones publicadas en esta sección.
Modificación activa de un campo de visión de un vehículo autónomo en vista de restricciones.
(04/09/2019). Solicitante/s: WAYMO LLC. Inventor/es: FERGUSON,DAVID I, ZHU,JIAJUN.
Un método implementado por un ordenador que comprende:
hacer que un sensor en un vehículo autónomo detecte información sobre un entorno en un primer campo de visión , en donde una parte del entorno está bloqueada en el primer campo de visión;
determinar un campo de visión deseado en el que la parte del entorno no está bloqueada;
basado en el campo de visión deseado y un conjunto de restricciones para el vehículo, determinar un segundo campo de visión en el que la parte del entorno está menos bloqueada que en el primer campo de visión, en donde el conjunto de restricciones comprende al menos una de las restricciones basadas en las leyes de tránsito y las restricciones basadas en la comodidad del pasajero; y
modificar una posición del vehículo, haciendo de esta manera que el sensor detecte información en el segundo campo de visión.
PDF original: ES-2749698_T3.pdf
Sistema de transporte, particularmente vehículo de transporte sin conductor.
(24/07/2019) Un sistema para transportar cargas en una superficie ondulada,
que comprende al menos un conductor primario y un vehículo que puede ser alimentado por el mismo sin contacto que comprende una bobina secundaria, acoplada inductivamente con el conductor primario , para la alimentación del vehículo,
caracterizado porque
un condensador está asociado a la bobina secundaria de modo que la frecuencia de resonancia asociada corresponde a la frecuencia media de la corriente inyectada en el conductor primario ,
en donde está dispuesto un medio de resorte entre una unidad de transmisión, que comprende una rueda de transmisión respectiva y una transmisión asociada , y un varillaje del vehículo,
en donde las ruedas con una separación fija del varillaje están dispuestas…
Movimiento restrictivo de un robot móvil.
(24/07/2019). Ver ilustración. Solicitante/s: IROBOT CORPORATION. Inventor/es: WILLIAMS,MARCUS, LU,PING-HONG, JOHNSON,JOSEPH M.
Un robot que comprende:
un cuerpo que se puede mover en relación con una superficie ;
uno o más dispositivos de medición dentro del cuerpo para emitir información basándose en una orientación del cuerpo en una ubicación inicial en la superficie ; y
un controlador dentro del cuerpo para determinar la orientación del cuerpo basándose en la información, y
caracterizado por que el controlador está configurado además para restringir el movimiento del cuerpo a un área impidiendo el movimiento del cuerpo más allá de una barrera virtual que define un límite que el robot no puede cruzar que es creado basándose en la orientación del cuerpo y la ubicación inicial, y
el controlador está configurado además para almacenar la barrera virtual que ha de ser utilizada subsiguientemente para restringir el movimiento del robot.
PDF original: ES-2746498_T3.pdf
Método y sistema de acoplamiento de aeronave.
(10/07/2019) Un método para acoplar físicamente una primera aeronave y una segunda aeronave, la primera aeronave es una aeronave en vuelo, la segunda aeronave es una aeronave en vuelo, el método comprende:
enviar, a partir de un transmisor ubicado en la primera aeronave, una señal electromagnética;
recibir, mediante un receptor ubicado en la segunda aeronave, la señal;
determinar, mediante uno o más procesadores, el uso de la señal recibida por la segunda aeronave, determinar la posición de una aeronave en relación con la otra aeronave;
controlar, mediante uno o más procesadores, utilizando la posición determinada de una aeronave con respecto a la otra aeronave, al menos una de la primera y segunda aeronave de manera que la primera y la segunda aeronave estén en una configuración predeterminada en donde la primera…
SISTEMA ROBÓTICO AUTÓNOMO PARA EL MONITOREO AUTOMÁTICO DEL ESTADO DE ESTANTERÍAS EN TIENDAS.
(04/07/2019) La invención se refiere a un sistema robótico autónomo, para el monitoreo automático del estado de estanterías en tiendas, que comprende: un robot móvil formado por un cuerpo que comprende: una base móvil que comprende un sistema motriz conectado a medios de desplazamiento y dirección; una estructura superior dispuesta para alojar sensores, al menos una unidad de procesamiento y medios de comunicaciones, en donde dichos sensores comprenden: al menos un sensor láser; al menos un sensor de distancia o profundidad o proximidad; y al menos un sensor de imagen; un sistema de navegación en comunicación con al menos un sensor láser, con al menos un sensor de imagen, con al menos un sensor de distancia o proximidad…
Procedimiento para el funcionamiento de un aparato de limpieza de desplazamiento automático.
(03/07/2019). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: HAHN,PIA.
Procedimiento para el funcionamiento de un aparato de limpieza de desplazamiento automático , en particular de un robot para aspirar y/o limpiar, desplazándose el aparato de limpieza en base a un mapa espacial almacenado en una o varias habitaciones y realizando en éstas dado el caso tareas de limpieza, recibiendo el aparato de limpieza además información de un sensor de incendios , dando lugar en particular en caso de una alarma de incendio a una llamada de emergencia, caracterizado por que el aparato de limpieza en caso de una alarma de incendio emite una señal acústica y/u óptica y partiendo de su ubicación actual se mueve hacia una salida de emergencia o una ubicación más segura.
PDF original: ES-2746863_T3.pdf
Sistema de comunicación inalámbrica para vehículos agrícolas.
(26/06/2019) Un sistema de comunicación inalámbrica para coordinar el movimiento de una pluralidad de vehículos agrícolas, comprendiendo cada vehículo un sistema de posicionamiento global (GPS), un módulo transmisor/receptor (Tx/Rx) multicanal que tiene un rango de comunicación limitado, y un procesador de señal conectado al módulo transmisor/receptor Tx/Rx multicanal, en donde:
- el transmisor está controlado por el procesador de señal y es operable para transmitir por un canal de comunicación predeterminado una señal que comprende, al menos, un identificador de vehículo único y una señal indicativa de las coordenadas de posición actuales del vehículo, y
- el procesador de señal es operable para:
…
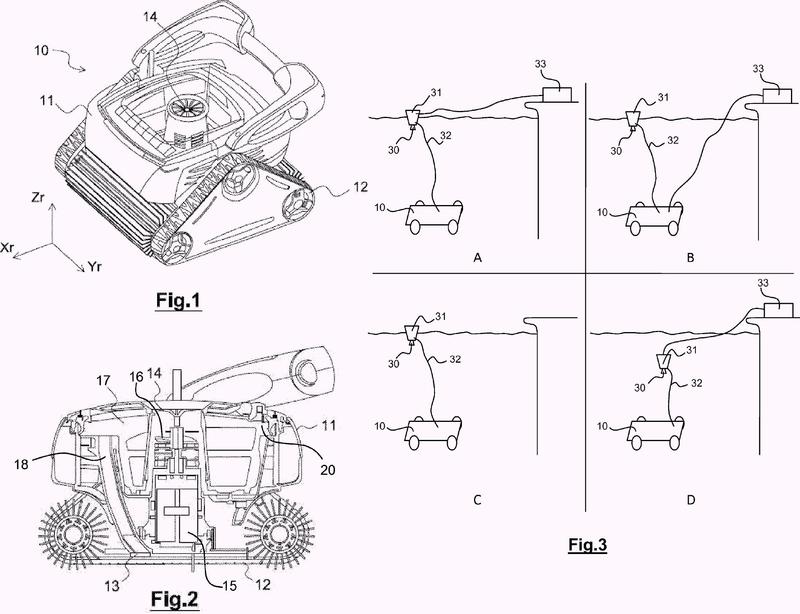
Sistema de limpieza de piscina con dispositivo de toma de imágenes.
(26/06/2019). Ver ilustración. Solicitante/s: ZODIAC POOL CARE EUROPE. Inventor/es: PICHON, PHILIPPE.
Sistema de limpieza de piscina que comprende un aparato de limpieza destinado a ser sumergido en la piscina, caracterizado por que el sistema comprende igualmente un medio de adquisición de imágenes solidarizado a un flotador por intermedio de un enlace flexible fijado al aparato de limpieza sumergido.
PDF original: ES-2743026_T3.pdf
Un sistema para reposicionar de forma autónoma un dispositivo unido a dispositivos rodantes.
(26/06/2019) Un sistema para controlar de forma autónoma los movimientos de al menos un dispositivo desde una primera posición a una segunda posición a lo largo de una superficie, el sistema comprende dispositivos de rodillo unidos al dispositivo, cada dispositivo de rodillo tiene un elemento rodante, donde al menos uno de los dispositivos de rodillo es una disposición rodante que comprende una carcasa parcialmente hueca adaptada para integrarse en el dispositivo a mover y, donde el elemento rodante está dispuesto en una primera porción extrema de la carcasa y el elemento rodante está conectado a un pistón dispuesto recíprocamente…
Procedimiento de tratamiento de un suelo.
(12/06/2019) Procedimiento de tratamiento, especialmente limpieza, de un suelo de una habitación por medio de un aparato de tratamiento automáticamente desplazable , en el que se confecciona un mapa de la habitación y se visualiza este mapa para un usuario del aparato de tratamiento , en el que el usuario puede seleccionar en el mapa confeccionado al menos una zona parcial de la habitación en la que el aparato de tratamiento deba realizar u omitir un tratamiento del suelo , en el que se confecciona el mapa de la habitación a partir de coordenadas tridimensionales de un sistema de coordenadas mundiales y en el que se asigna una coordenada tridimensional dentro del sistema de coordenadas mundiales a cada punto de una multiplicidad de puntos de la habitación y/o de un obstáculo dispuesto en la habitación, caracterizado por que se visualiza el…
Aparato y método para determinar elementos de referencia de un entorno.
(12/06/2019) Un método para determinar elementos de referencia de un entorno para asociar un mapa predeterminado con un mapa del entorno en tiempo real, comprendiendo el método al menos las etapas de:
- proporcionar un valor de techo y un valor de suelo, correspondiendo estos valores respectivamente a un techo virtual o real y a un suelo virtual o real en el entorno ;
- medir, utilizando un sensor de medición de distancia, conjuntos de posiciones de puntos del entorno, comprendiendo cada una de dichas posiciones al menos una primera coordenada a lo largo de una primera dirección (X) y una segunda coordenada a lo largo de una segunda dirección (Y) no colineal con la primera dirección (X), donde cada conjunto de posiciones de puntos del entorno está alineado a lo largo de una línea recta;
- determinar elementos de referencia…
Vehículo autónomo que minimiza las reacciones humanas.
(05/06/2019) Vehículo de carretera que puede conducir de manera autónoma, presentando el vehículo un parabrisas que incorpora uno o más moduladores de luz conmutables y una o más capas que aumentan la reflexión de luz visible para un espectador externo, y un sistema de control que está configurado para hacer funcionar selectivamente dicho parabrisas como un espejo unidireccional que controla una transmitancia de luz visible regular de los moduladores de luz del parabrisas entre dos o más estados de luz eléctricamente conmutables que proporcionan niveles respectivos de acceso visual a través del parabrisas desde el exterior del vehículo,
en el que el parabrisas presenta un primer estado de luz que proporciona acceso…
Procedimiento y dispositivo para coordinar una logística de transporte, así como sistema logístico de transporte.
(03/06/2019) Procedimiento para coordinar una logística de transporte, donde el procedimiento comprende los siguientes pasos:
recepción de una señal de petición de una máquina de trabajo mediante una interfaz de un dispositivo para coordinar, donde la señal de petición señaliza un requerimiento de transporte de la máquina de trabajo ;
emisión de una señal de control mediante una interfaz del dispositivo a una máquina de transporte , para guiar la máquina de transporte hacia la máquina de trabajo cuando la señal de petición fue recibida,
donde la señal de control comprende una información de recorrido sobre un recorrido de la máquina de trabajo…
Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor, sistema de asistencia al conductor así como vehículo de motor.
(29/05/2019) Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor , en el que se establece una posición relativa entre el vehículo de motor y al menos un objeto en un área del entorno del vehículo de motor por medio de un equipo sensor del vehículo de motor , con ayuda de la posición relativa establecida se determina una trayectoria de desplazamiento para un desplazamiento del vehículo de motor pasando junto al al menos un objeto y se determina una distancia de colisión, que describe una distancia entre el vehículo de motor y el al menos un objeto durante el desplazamiento a lo largo de la…
Vehículo guiado automático.
(23/05/2019) Un vehículo guiado automático que comprende:
- un carro de horquilla con al menos una horquilla de soporte de carga ,
- un sistema de accionamiento de propulsión para impulsar el vehículo,
- un sensor para adquirir datos de posición de objetos ubicados en un campo de detección del sensor, y
- un ordenador que recibe datos de posición del sensor y que controla el sistema de accionamiento de propulsión para guiar automáticamente el vehículo,
caracterizado por que el vehículo comprende además al menos un miembro de referencia ubicado en el campo de detección del sensor, el al menos un miembro de referencia y el sensor sujetos rígidamente a un bastidor rígido común ,
por que el sensor es operativo para al menos adquirir periódicamente datos de posición de control indicativos…
Procedimiento para el atraque operado a motor.
(22/05/2019) Procedimiento para el atraque operado a motor con un barco , en particular un yate, en un punto de atraque en una zona de atraque, donde en una etapa de elaboración del mapa se elabora un mapa real de un entorno de la zona de atraque, donde en una etapa de determinación de la posición de atraque se determina el punto de atraque y una posición de atraque del barco en el punto de atraque en la zona de atraque, donde en una etapa de planificación de la trayectoria se elaboran una pluralidad de trayectorias provisionales desde la posición real del barco a la posición de atraque del barco , donde las trayectorias provisionales se evalúan según al menos un criterio de evaluación y en base a él se asocia un valor de calidad, donde la trayectoria provisional con el mejor valor de calidad se selecciona como una trayectoria…
Robot autónomo de limpieza de superficies.
(16/05/2019) Un robot móvil de limpieza de suelos que comprende:
un cuerpo de robot que define una dirección (F) de accionamiento hacia delante;
un sistema de accionamiento que soporta el cuerpo de robot para maniobrar el robot a través de una superficie , comprendiendo el sistema de accionamiento ruedas de accionamiento derecha e izquierda (124a, 124b) dispuestas en las partes derecha e izquierda correspondientes del cuerpo de robot; y
un conjunto de limpieza dispuesto sobre el cuerpo de robot, comprendiendo el conjunto de limpieza:
un soporte de almohadilla dispuesto delante de las ruedas motrices (124a, 124b) y que tiene…
Cobertura multimodal para un robot autónomo.
(16/05/2019) Un robot móvil , que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento;
en el que dicho sistema de control tiene un modo de seguimiento de obstáculos, mediante el cual dicho robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación;
dicho sistema de control está configurado para hacer funcionar el robot en uno o varios comportamientos que incluyen un comportamiento de cobertura en el que el sistema de control alterna cíclicamente entre…
Aparato de desplazamiento automático así como procedimiento para la orientación de un aparato de este tipo.
(08/05/2019). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: MEYER, FRANK, SCHLISCHKA, PATRICK, SAUERWALD,ANDRES, MEGGLE,MARTIN, WALLMEYER,MARIO.
Procedimiento para la orientación de un aparato de desplazamiento automático , en particular de un aparato de limpieza para la limpieza de un suelo como un robot para aspirar y/o barrer, llevando a cabo el aparato al menos automáticamente un mapeo de un área completa (G) por ejemplo mediante una medición de distancias en todas las direcciones, llevando a cabo el aparato al mismo tiempo durante el mapeo del área completa o después una subdivisión automática del área completa (G) en subáreas (T1 a T8), llevándose a cabo la subdivisión en subáreas con respecto a diferentes recubrimientos de suelo (B1 a B5), caracterizado por que se juntan y almacenan las áreas contiguas con la misma rugosidad y/u orientación del pelo en una subárea.
PDF original: ES-2729749_T3.pdf
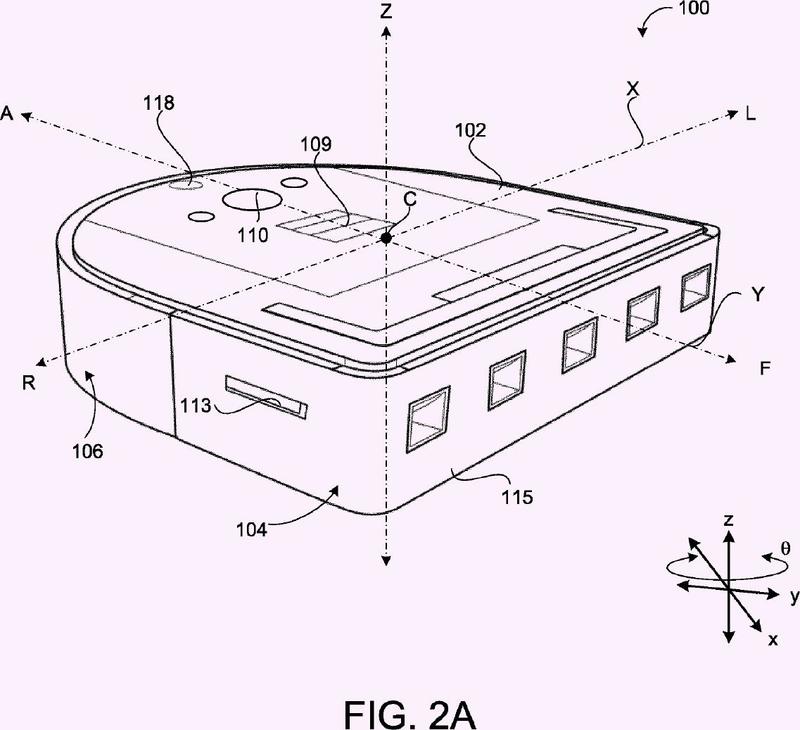
Estación de acoplamiento posicionable en campo para robots móviles.
(08/05/2019) Una estación de acoplamiento posicionable acoplable a al menos un robot móvil para proporcionar servicios de apoyo y al menos un recurso al al menos un robot móvil cuando está acoplado a la misma mediante un acoplamiento, siendo el al menos un robot móvil del tipo que es capaz de recorrer una superficie , comprendiendo la estación de acoplamiento posicionable
- una carcasa ;
caracterizada por que la estación de acoplamiento posicionable comprende además
- un anclaje conectado a la carcasa configurado para acoplarse selectivamente con la superficie ,
en donde la estación de acoplamiento posicionable está configurada para alternar, selectivamente, entre una primera condición en la que el…
Aparato de control para vehículo utilitario que navega de manera autónoma.
(11/04/2019) Un aparato para controlar la operación de un vehículo utilitario de navegación autónoma adaptado para desplazarse alrededor de un área de trabajo , definida por un cable limitador que genera un campo magnético alrededor del mismo cuando se le suministra corriente eléctrica, para que funcione de manera autónoma, y que tiene un sensor magnético que está adaptado para producir una salida que indica la intensidad del campo magnético generado por el cable limitador y una unidad de determinación de posición que está adaptada para determinar una posición del vehículo con respecto al área de trabajo basada en la salida del sensor…
Procedimiento para la puesta a disposición de un vehículo definida por el usuario.
(10/04/2019) Procedimiento para la puesta a disposición definida por el usuario de un vehículo en el que el vehículo identifica autónomamente, a partir de un punto de bajada (B) de un usuario en una zona de aparcamiento, una posición de aparcamiento (C) en la zona de aparcamiento y se dirige a la misma, conduciendo el vehículo a solicitud del usuario automáticamente a un punto de transferencia (D) en la zona de aparcamiento para su uso posterior, almacenándose un trayecto recorrido dentro de la zona de aparcamiento hasta la posición de aparcamiento (C) y pudiéndose definir el punto de transferencia (D) en cualquier punto de este trayecto , caracterizado por que se almacena la posición del punto de bajada (B) en el trayecto , por que el vehículo se comunica a través de un dispositivo…
Sistema de seguimiento dinámico y método de guiado automático basado en cámaras 3D de tiempo de vuelo.
(03/04/2019) Un sistema [Fig. 1, ] de seguimiento dinámico que comprende:
- una cámara [Fig. 1, ] tridimensional basada en tecnología de tiempo de vuelo, que comprende:
un receptor sensible a las emisiones de luz comprendidas en un cierto intervalo de longitudes de onda, un primer emisor [Fig. 1, (2c)] de señales luminosas;
un microcomputador [Fig. 1, 2a] que conecta y calcula la información tridimensional procedente del receptor [Fig. 1, (2b)] y que controla al emisor [Fig. 1, (2c)], y
un computador [Fig. 1, (2d)] secundario interno o externo que incorpora análisis de datos, servicios de base de datos, controles y comunicación externa con servicios de comunicación de datos locales o globales y vehículos;
caracterizado por que el sistema de seguimiento dinámico comprende adicionalmente:
- una baliza [Fig. 1, ] sensible a…
(02/04/2019) Un sistema de robot de cobertura autónomo que comprende:
un contestador de límite activo que comprende un cable alimentado con una corriente modulada colocado a lo largo de un perímetro (1006A,1006B) de una propiedad ; al menos un contestador de límite pasivo (600,600A,600B,600C,600D,600E,600F,600G,600H,600I,6010,6010A,6010B,6010C) colocado en el interior de una propiedad (1001 A) limitado por el contestador de límite activo ; y
un robot para el cuidado del césped autónomo que comprende:
un cuerpo ; un sistema de accionamiento transportado por el cuerpo y configurado para maniobrar el robot a lo largo del interior de la propiedad (1001A);
y
un sistema…
(01/04/2019) Un sistema de robot de limpieza que comprende:
un puente de datos de red que comprende:
una interfaz de red de banda ancha que se puede conectar a una red de protocolo de Internet que transporta comunicaciones transferidas cumpliendo un protocolo de Internet;
una interfaz de comandos inalámbrica que se puede conectar a una red de protocolo de comandos inalámbricos y que transporta comunicaciones transferidas según un protocolo de comandos; y
un componente de puente de datos adaptado para extraer los comandos en serie recibidos mediante la interfaz de red de banda ancha desde el protocolo de internet y para aplicar el protocolo de comandos al mismo, y para enviar los comandos en serie mediante la interfaz inalámbrica de banda estrecha; y
un robot de limpieza móvil que comprende:
un sistema de dirección…
(01/04/2019). Solicitante/s: IROBOT CORPORATION. Inventor/es: SANDIN,PAUL E, Campbell,Tony L, HALLORAN,Michael J, MAMMEN,Jeffry W, WALKER,Jason S, BILLINGTON,John N. JR, OZICK,DANIEL M.
Un sistema de distribución de contenido tematizado para distribuir datos a un robot , incluyendo el sistema:
un primer servidor configurado para funcionar en conjunto y en comunicación con una primera red;
un nodo del lado del usuario configurado para transmitir datos al robot ;
un servidor de contenido configurado para funcionar en conjunto y en comunicación con la primera red y para transmitir contenido tematizado al robot a través del nodo del lado del usuario utilizando la primera red, caracterizado por que,
el contenido tematizado incluye una agrupación de movimientos o comportamientos de robot funcionales, en donde el contenido tematizado se selecciona basándose en la monitorización y análisis de los datos generados por el robot.
PDF original: ES-2706729_T3.pdf
Procedimiento para la localización y el modelado simultáneos de mapas.
(27/03/2019) Procedimiento para la localización y el modelado simultáneos de mapas para la auto-localización de un aparato de desplazamiento automático, especialmente de un aparato de recogida de polvo del suelo que se desplaza automáticamente, con ruedas de desplazamiento accionadas preferiblemente por medio de un motor eléctrico, estando el aparato provisto de un dispositivo de detección de obstáculos (H) compuesto por unidades ópticas de emisión y de recepción, calculándose además una pluralidad de posibles posiciones , es decir, de posiciones y orientaciones, partiendo de una primera posición supuesta previamente calculada del aparato y considerándose,…
Estimación de posiciones de un dispositivo y de al menos un objetivo en un entorno.
(27/03/2019) Un procedimiento para estimar una posición de un dispositivo y de al menos un objetivo (204A, 204B) en un entorno, incluyendo el procedimiento definir un marco de referencia de coordenadas globales, un marco de referencia de coordenadas locales estimadas, y un marco de referencia de coordenadas locales sin corrección en el cual la posición del dispositivo se supone sin error, e incluyendo el procedimiento, además, computar un vector de estado definido por:
un vector que representa una posición del dispositivo con respecto al origen del marco de referencia de coordenadas globales (g);
un vector que representa una posición estimada del al menos un objetivo con respecto al origen del marco de referencia de coordenadas locales sin corrección (L); y
una forma de estado de error basada en una diferencia entre el origen del marco de referencia…
Aparato de limpieza de suelos autopropulsado.
(27/02/2019) Aparato de limpieza de suelos autopropulsado que comprende un chasis con un plano central que está orientado paralelo a un sentido de desplazamiento hacia delante en línea recta y en el que está dispuesto o formado un extremo delantero del aparato de limpieza de suelos , con respecto al sentido de desplazamiento hacia delante en línea recta , siendo el extremo delantero un extremo del aparato de limpieza de suelos que más sobresale hacia delante, y un dispositivo de sensor óptico que está dispuesto en el chasis , presentando el dispositivo de sensor óptico una primera unidad de emisor/receptor que con…
Sistemas y métodos para controlar la transportación de vehículos.
(27/02/2019) Un sistema de transportación de vehículos, que comprende:
una pluralidad de elementos de agarre ;
un sistema analítico ;
un sistema de control ; y
un sistema de seguimiento de posición
en donde la pluralidad de elementos de agarre son para la instalación en un área de conducción dinámica dentro de una atracción de parque de diversiones y se configuran para ejecutarse según las instrucciones de comando recibidas desde el sistema de control , donde el desempeño de la pluralidad de los elementos de agarre se configuran para controlar el movimiento de un vehículo dispuesto sobre la pluralidad de elementos de agarre ,
el sistema analítico se configura para rastrear,…
Procedimiento y dispositivo de determinación de la posición.
(27/02/2019) Procedimiento para determinar una posición de un objeto móvil dentro de una representación virtual de un espacio, que comprende las etapas:
a. proporcionar una representación virtual de un espacio, incluyendo información sobre la posición de al menos un punto de referencia (m1, m2, m3, m4) que se corresponde sustancialmente con la posición de una marca de referencia (M1, M2, M3, M4) respectiva en el espacio; caracterizado por las siguientes etapas adicionales:
b. calcular una segunda posición esperada (Pexp) del objeto dentro de la representación virtual, en base a una primera posición actual (P1) y en uno o varios parámetros de accionamiento de una o varias unidades de accionamiento del objeto móvil;
…
Sistema de monumento montado en robótica para sistemas de metrología.
(14/02/2019) Un aparato que comprende:
uno o más vehículos robóticos, en donde cada uno del uno o más vehículos robóticos está configurado para moverse a una posición respectiva dentro de un área de fabricación;
uno o más puntos de referencia asociados con el uno o más vehículos robóticos, en donde cada uno del uno o más vehículos robóticos comprende:
una base ; y
una estructura asociada de manera removible con la base , en donde la estructura está configurada para soportar y mantener uno o más del uno o más puntos de referencia;
uno o más sistemas de medición en el área de fabricación, en donde cada uno del uno o más sistemas de medición está configurado para generar una o más mediciones de posición para el uno o más puntos de referencia para usar en la alineación del uno o más…
{kind=link}
{kind=link}