CIP-2021 : G05D 1/02 : Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/02[1] › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/02 · Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP2021: Invenciones publicadas en esta sección.
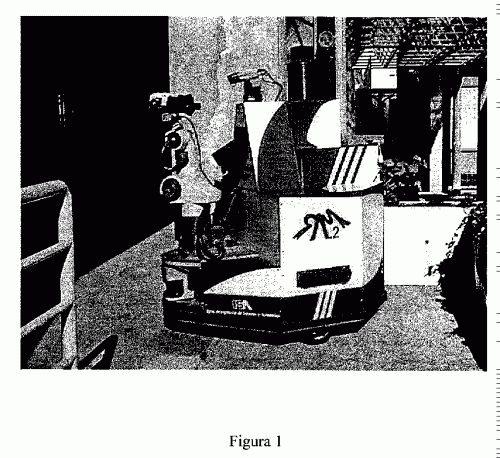
SILLA DE RUEDAS ROBOTIZADA CON CAPACIDAD OPERATIVA AUTONOMA.
(01/02/2009). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Inventor/es: GONZALEZ JIMENEZ,JAVIER, MUOZ RAMIREZ,ANTONIO, FERNANDEZ MADRIGAL,JUAN A, GALINDO ANDRADES,CIPRIANO, BLANCO CLARACO,JOSE LUIS, AREVALO ESPEJO,VICENTE M.
Silla de ruedas robotizada con capacidad operativa autónoma.#La presente invención se refiere a un sistema de navegación que permite la adaptación de una silla de ruedas eléctrica estándar para que pueda moverse de manera autónoma o semiautónoma. Tal modificación comprende la incorporación de un conjunto de sensores, un computador portátil estándar (posiblemente conectado a otros computadores de forma inalámbrica) y un sistema electrónico basado en microcontroladores. Con este equipamiento, un software procesa la información sensorial y genera comandos de movimiento que el sistema electrónico se encarga de traducir en señales a los motores de la silla. Este invento facilita el desplazamiento de personas con problemas de movilidad en entornos interiores como hospitales, oficinas, centros comerciales, etc.
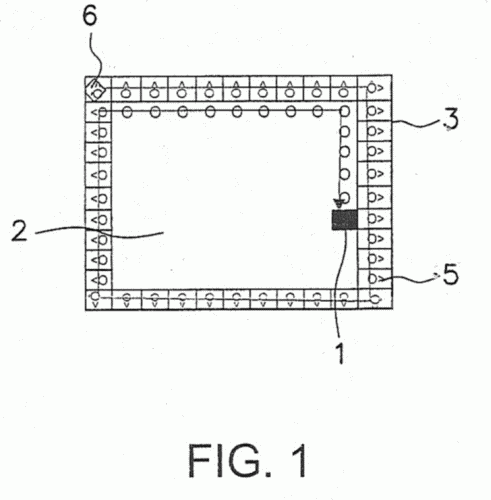
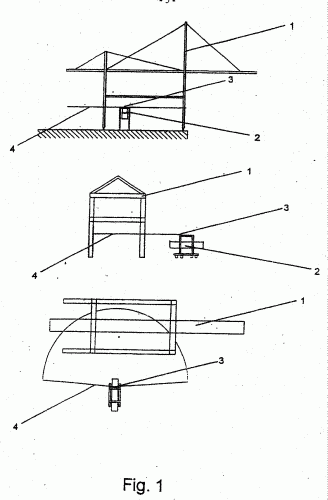
SISTEMA DE NAVEGACION PARA ELECTRODOMESTICOS Y MAQUINARIA PARA EL HOGAR.
(01/03/2007). Ver ilustración. Solicitante/s: ELECTRODOMESTICOS TAURUS, S.L.. Inventor/es: BAJONA XANDRI,JOSEP MARIA, TRENCH ROCA,LLUIS, ALET VIDAL,JOSEP.
Sistema de navegación para electrodomésticos y maquinaria para el hogar. Comprende un dispositivo móvil , autónomo, que se desplaza sobre una superficie a explorar que se caracteriza porque se compone de las siguientes fases: una primera fase en la que el dispositivo móvil identifica el perímetro de trabajo , cambiando de dirección o de sentido, según el caso, al detectar con un obstáculo o perder el contacto con el perímetro de trabajo , una segunda fase, que puede ser simultánea a la primera, en la que el referido dispositivo móvil subdivide la superficie en unas subunidades , en base a la información obtenida a su paso por la superficie de trabajo, estableciendo un mapa, y una tercera fase en la que el dispositivo móvil finaliza su navegación cuando haya detectado todo el perímetro de trabajo y trabajado por toda la superficie útil.
SISTEMA Y METODO DE CONTROL DE UN VEHICULO AEREO NO TRIPULADO.
(16/02/2007). Ver ilustración. Solicitante/s: INSTITUTO NACIONAL DE TECNICA AEROESPACIAL "ESTEBAN TERRADAS". Inventor/es: ANGEL MARTINEZ,FRANCISCO JAV., MORALES DE LA RICA,M. JESUS, IBAÑEZ COLAS,FRANCISCO JOSE, HERRERA MARTIN,ANDRES, DE LA PARRA CARQUE,SERGIO.
Un sistema y método de control de un vehículo aéreo no tripulado, configurado de manera que, en un modo de misión, el vehículo siga la ruta de misión. El sistema comprende medios para almacenar datos indicativos de al menos una ruta auxiliar , de manera que a cada uno de una pluralidad de los segmentos de la ruta de misión , esté asignada al menos una parte de al menos una ruta auxiliar. Además, el sistema comprende medios de cambio de ruta configurados para, como respuesta a un evento de abandono de misión, determinar qué parte de que ruta auxiliar está asignada al segmento de la ruta de misión en la que se encuentra el vehículo, de manera que el vehículo pueda cambiar de la ruta de misión a la ruta auxiliar que corresponda.
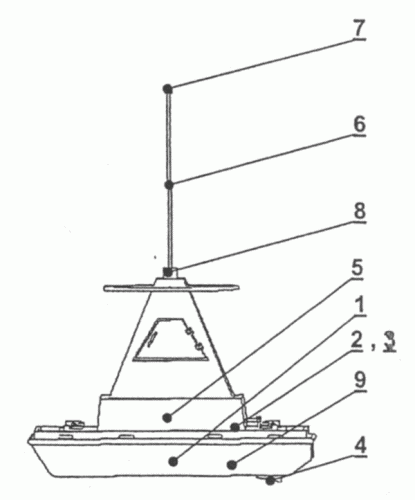
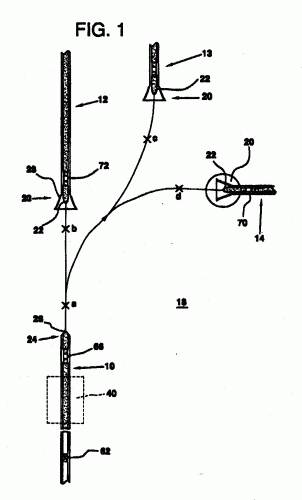
SISTEMA DE NAVEGACION CON BASE EXTERNA DE CONTROL Y BALIZA AUTOGUIADA.
(16/12/2006). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Inventor/es: TADEO BOGUMIL,FELIX, MASIP ALVAREZ,JOSE ALBERTO, SEBASTIA ROCA,JORDI, BASSA PRAT,MARC, GARCIA RELAT,MIREIA, GUTIERREZ REIXACH,XAVIER, COPETE VILELLA,ANGEL, MEDINA PEA,VICTOR.
Sistema de navegación con base externa de control y baliza autoguiada. Baliza autoguiada capaz de trazar cualquier trayectoria, enviada desde una base fija terrestre, sin que ésta sea alterada por factores externos (corrientes marinas, vientos, etc.). Mejorando la realización de tareas en diferentes campos de aplicación, tales como puertos deportivos, zonas navegables, vigilancia y seguridad, salvamento marítimo o transporte de pequeñas mercancías. La baliza está compuesta básicamente de motor eléctrico , piloto automático , bombas electro-hidráulicas , timón , baterías de servicio y de semi-motor , antena de comunicaciones con señal luminosa , videocámara , y flotadores que garantizan su flotabilidad y navegabilidad . La unidad de base terrestre consta principalmente de GPS-lector de carta, ordenador conectado al GPS, software específico y una estación emisora/receptora.
EQUIPO AUTONOMO DE MANTENIMIENTO DEL TERRENO RESPETUOSO CON EL MEDIO AMBIENTE.
(16/08/2006). Solicitante/s: MCMURTRY LTD. Inventor/es: MCMURTRY, RICHARD, MCMURTRY, BEN.
Equipo autónomo de mantenimiento del terreno que comprende un vehículo para realizar una operación de mantenimiento del terreno, y medios de control para controlar, por lo menos un parámetro de operación del vehículo , caracterizado en que los medios de control tienen medios de entrada para recibir datos relacionados con una o más condiciones de ambiente como lluvia, humedad del suelo y pendiente, en donde el parámetro de operación o por lo menos uno de los parámetros de operación puede variarse por los medios de control de forma que se modifique la operación del vehículo durante una operación de mantenimiento del terreno en respuesta a las condiciones ambientales.
EQUIPO DE ANALISIS DE IMAGENES.
(16/04/2006) Un sistema de análisis de imágenes que comprende: una fuente de luz ; los medios para iluminar el campo de visión de interés con la fuente de luz; ópticas receptoras para recibir la luz reflejada desde el campo de visión que se va a analizar: un detector de luz de región múltiple para detectar la luz recibida desde las ópticas receptoras, en el que las diferentes regiones del detector de luz se pueden actuar de manera separada; y los medios de procesamiento para medir el tiempo de viaje de las señales de luz desde la fuente de luz a la porción actuada del detector para todas las direcciones iluminadas y las derivar distancias de los tiempos de viaje;…
SISTEMA DE RECONOCIMIENTO DE UN CAMBIO DE CARRIL.
(16/04/2006). Solicitante/s: BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT. Inventor/es: PRESTL, WILLIBALD.
Sistema de asistencia al conductor en vehículos automóviles con una unidad electrónica y una cámara mediante la cual se reconoce el paso por encima de una marcación de la calzada, obteniendo la unidad electrónica, además, al menos las informaciones de un sistema de navega ción existente en el vehículo automóvil, mediante las cuales se capta, al pasar por encima de una marcación de la calzada, el entorno de la vía pública con respecto a esta marcación de la calzada, caracterizado porque, en el caso de una calzada de varios carriles, se realiza con ayuda de los datos de navegación una correlación del vehículo con un carril determinado y solamente al abandonar la limitación izquierda o derecha más exterior del carril se reconoce una desviación respecto de la vía pública.
DETECCION DE PERFIL DE RUTA.
(01/03/2006) Un aparato para la predicción del perfil de ruta por delante de un vehículo que comprende: medios de digitalización y almacenamiento operables para digitalizar y almacenar sucesivos cuadros datos de imagen de vídeo en coordenadas de pantalla (X, Y) donde cada cuadro contiene puntos característicos y un horizonte de imagen de pantalla (H), relacionados con la carretera por delante del vehículo utilizando algoritmos de detección de bordes; y medios de procesamiento operables para procesar los datos de imagen de vídeo a fin de identificar marcas de carril en la carretera, donde el procesador incluye: I) una transformación de perspectiva inversa (ecuación 1) operativa para transformar los puntos característicos según coordenadas de pantalla (X, Y) en coordenadas reales basadas en la carretera (x, z) con referencia al horizonte de la imagen de…
ROBOT DE LIMPIEZA PARA LA ELIMINACION DE EXCREMENTOS EN GRANJAS AGRICOLAS.
(16/09/2005). Ver ilustración. Solicitante/s: FALCON VEIGA JOSE LUIS Y OTRO, C.B. Inventor/es: FALCON VEIGA,JOSE LUIS.
Robot de limpieza para la eliminación de excrementos en granjas agrícolas, constituido por motor eléctrico, dos baterías, grupo reductor, dos ruedas de caucho macizas, dos brazos de chapa galvanizada, cuchilla de limpieza. El robot se acciona automáticamente por control remoto o de forma anticipada programada implementando un sistema electrónico constituido por una placa de control, placa de telemando, placa de amperímetro, puente H y placa de cargador.
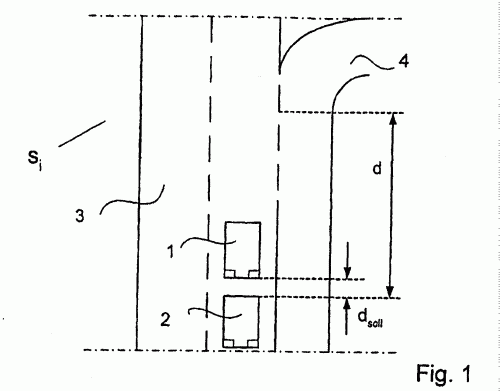
PROCEDIMIENTO Y REGULACION LONGITUDINAL DE UN VEHICULO EN EL QUE SE CAPTAN INFORMACIONES DE UN SISTEMA DE NAVEGACION.
(16/07/2005). Ver ilustración. Solicitante/s: BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT. Inventor/es: PRESTL, WILLIBALD, STEINLE, JOACHIM, DR., PRIMM, UWE, NAAB, KARL, DR.
Procedimiento para la regulación longitudinal de un vehículo en el que se captan informaciones de un sistema de navegación y en el que se determina, en función de las informaciones del sistema de navegación, un valor nominal de al menos un parámetro para la regulación longitudinal, caracterizado porque en un proceso de regulación longitudinal se establece una probabilidad de salida (w) sobre la base de una distancia nominal prefijada (dnom) a un vehículo precedente sobre una autopista por medio de las informaciones del sistema de navegación, y porque se impide una aceleración longitudinal (aveh) o al menos se realiza ésta en forma reducida cuando no se reconoce ya el vehículo precedente y la probabilidad de salida (w) es mayor que un umbral prefijado.
SISTEMA DE ESTABILIZACION DE UN AVION SIN PILOTO Y SISTEMA DE PILOTAJE DE UN AVION SIN PILOTO QUE UTILIZA UN SISTEMA DE ESTABILIZACION DE ESTE TIPO.
(16/04/2005). Ver ilustración. Solicitante/s: AEROSPATIALE MATRA MISSILES. Inventor/es: DEBOURLE, FRANCOIS.
Sistema de estabilización de un avión sin piloto, que comprende un captador óptico , dotado de cuatro ventanas transparentes y diametralmente opuestas dos a dos, fijado a una platina , que se caracteriza porque este captador está montado en un sistema tipo cardan, con dos ejes de rotación perpendiculares , siendo un bastidor móvil alrededor de un primer eje paralelo al eje longitudinal del fuselaje del avión sin piloto , estando el segundo eje , que es horizontal, fijado a este bastidor , siendo la platina móvil alrededor de este segundo eje , y porque el citado sistema comprende dos servocomandos de comando de la posición del captador óptico, estando el primero fijado al fuselaje del avión sin piloto , y siendo el segundo solidario con este bastidor.
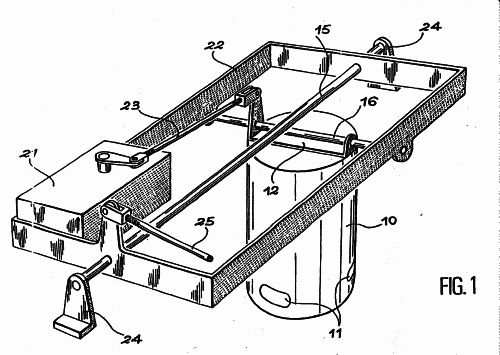
SISTEMA AUTOMATICO DE GUIADO DE UNA GRUA PORTICO PARA UNA MAQUINA DE MANIPULACION DE CONTENEDORES.
(16/03/2005) LA INVENCION SE REFIERE A UN SISTEMA AUTOMATICO DE DIRECCION DE UNA MAQUINA DE MANIPULACION DE CONTENEDORES, POR EJEMPLO, UNA GRUA PUENTE MOVIL , CON EL FIN DE HACER QUE LA MAQUINA DE MANIPULACION DE CONTENEDORES SE MUEVA A LO LARGO DE LINEAS RECTAS, DETERMINADAS POR FILAS DE CONTENEDORES O POR UNA VIA DE FERROCARRIL O EQUIVALENTE. EL SISTEMA DE DIRECCION COMPRENDE UN SISTEMA DE NAVEGACION INSTALADO EN EL CAMPO DE CONTENEDORES, EL CUAL DETERMINA LA LINEA DE FUNCIONAMIENTO DESEADA POR MEDIO DE DOS PUNTOS COLOCADOS ARBITRARIAMENTE, Y MANTIENE LA MAQUINA DE MANIPULACION DE CONTENEDORES EN LA LINEA DESEADA, A FIN DE PERMITIR UNA TRANSFERENCIA DE CONTENEDORES.…
SISTEMA ROBOTIZADO PARA SERVICIO EN INVERNADEROS.
(16/03/2005). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Inventor/es: GARCIA VACAS,FRANCISCO, SIMON MATA,ANTONIO, MUÑOZ MARTINEZ,VICTOR FERNANDO, GARCIA CEREZO,ALFONSO JOSE, OLLERO BATURONE,ANIBAL, GOMEZ DE GABRIEL,JESUS MANUEL, MARTINEZ RODRIGUEZ,JORGE LUIS, MANDOW ANDALUZ,ANTHONY, FERNANDEZ LOZANO,JESUS, MOLINA MESA,RICARDO.
Sistema robotizado para servicio en invernaderos, caracterizado por una cabeza tractora autónoma, con capacidad sensorial y una estación para carga de pago, y un remolque también para carga de pago. El sistema puede portar diversos equipos necesarios para el trabajo en los invernaderos, como aparatos de fumigación, cámaras de inspección o brazos robot para recolección u otras tareas. El sistema puede moverse dentro del invernadero, bien autónomamente, gracias a un controlador y a sus sensores, entre los que puede contarse un sistema de posicionamiento global, bien según un plan establecido previamente, bien ser controlado remotamente por un operador humano con auxilio de cámaras de a bordo.
PROCEDIMIENTO DE ENRUTADO HORIZONTAL DE UNA AERONAVE ENTRE DOS PUNTOS DE PASO OBLIGADOS.
(16/01/2005). Ver ilustración. Solicitante/s: THOMSON-CSF SEXTANT. Inventor/es: BONHOURE, F. THOMSON-CSF PROP. INT. DEP. BREVETS, INGLESE, F. THOMSON-CSF PROP. INT. DEP. BREVETS.
Procedimiento de enrutado horizontal de una aero nave entre dos puntos de paso obligados (I, F) respetando limitaciones impuestas por consignas de radio de viraje y por consignas de orientación en ruta o rumbo (rI, rF) a mantener en los puntos de paso obligados (I, F) que definen una trayectoria formada por dos arcos de círculo unidos por un segmento de recta.
PROCEDIMIENTO PARA LA GENERACION DE UNA TRAYECTORIA HORIZONTAL DE EVITACION DE ZONAS PELIGROSAS PARA UNA AERONAVE.
(16/11/2004) Procedimiento para la generación, mediante el sistema de navegación de una aeronave, de una trayectoria horizontal de evitación de zonas peligrosas entre dos puntos de paso impuestos, uno denominado inicial (I) y otro denominado final (F), que respeta las restricciones de dirección, aproximación, ruta o rumbo, radio de viraje en los puntos de paso impuestos, y de evitación de las zonas peligrosas (M1, M2, M3) delimitadas por los contornos, cuyo procedimiento comprende la generación de modelos de los contornos de cada zona peligrosa mediante una sucesión de segmentos delimitados por puntos geográficos (P11 a P19), y caracterizado porque comprende, también, las etapas siguientes: - determinación de las características de un primero y un segundo círculos de orientación…
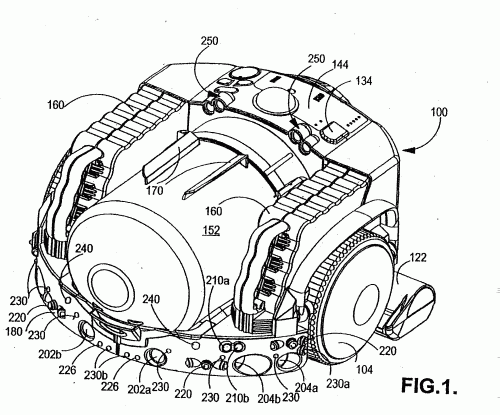
INDICADOR PARA UNA MAQUINA ROBOTICA.
(16/06/2004). Ver ilustración. Solicitante/s: DYSON LIMITED. Inventor/es: BISSET, DAVID, LINDSEY.
Una máquina robótica que tiene un conjunto de sensores por medio de los cuales la máquina robótica puede interaccionar con su entorno, un controlador para controlar la máquina robótica para llevar a cabo una tarea utilizando los sensores y una luz indicadora para indicar el estado de la interacción entre la máquina y el entorno, donde el controlador está dispuesto para hacer cambiar el color de la luz según el estado de la interacción y donde la luz indicadora consta de dos o más fuentes de luz de diferente color (R, G, B) que se activan separadamente, y medios para combinar (35B) la salida de luz de las fuentes de luz (R, G, B) para producir el efecto de una única luz de color.
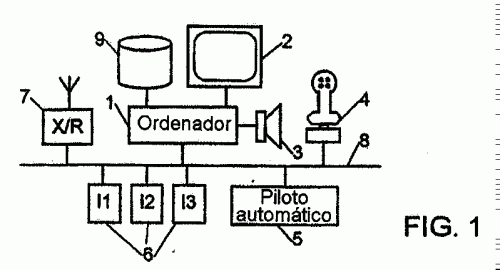
SISTEMA Y METODO PARA EL CONTROL DE LA VELOCIDAD E IDENTIFICACION DE LA POSICION DE UN VEHICULO.
(16/06/2004). Ver ilustración. Solicitante/s: UNIVERSIDAD DE ALCALA.. Inventor/es: BOQUETE VAZQUEZ,LUCIANO.
Sistema y método para el control de la velocidad e identificación de la posición de un vehículo. Consiste en un módulo portátil y un módulo fijo. El módulo portátil está formado por un tacómetro , un sistema microprocesador , un sistema de posicionamiento geográfico y un sistema de comunicación remota con el módulo fijo. El módulo fijo está formado por un sistema de comunicación remota y un ordenador personal que ejecuta la aplicación de control del sistema. El módulo fijo puede controlar a distancia un número indeterminado de módulos portátiles, cada uno a bordo de un vehículo, conociendo su velocidad y ubicación geográfica; de este modo se puede estimar si el conductor cumple las normas de tráfico relativas a la velocidad máxima, en función de que el vehículo se encuentre en entornos urbanos o no urbanos. Además se puede localizar el vehículo en cualquier momento.
(01/06/2004) Un robot autónomo, autopropulsado para movimiento sobre una superficie que ha de ser tratada, comprendiendo el robot: un suministro de potencia; un mecanismo de tracción que recibe potencia del suministro de potencia para mover el robot sobre la superficie; un mecanismo para depositar de modo controlable un material fluido sobre la superficie; una pluralidad de sensores que proporcionan señales para permitir que el robot navegue sobre la superficie; uno o más detectores destinados a detectar la presencia del material sobre la superficie y a proporcionar señales indicativas del mismo; y un sistema de control que recibe las señales de los sensores y detectores, para controlar el mecanismo de tracción y el mecanismo de deposición con dependencia de las señales recibidas de los sensores y detectores, caracterizado porque…
VEHICULO ROBOTICO CON CAPACIDAD DE NAVEGACION AUTONOMA DOTADO DE BRAZO ARTICULADO PARA LA MANIPULACION REMOTA DE OBJETOS.
(01/06/2004). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Inventor/es: SIMON MATA,ANTONIO, OLLERO BATURONE,ANIBAL, MARTINEZ RODRIGUEZ,JORGE LUIS, GONZALEZ JIMENEZ,JAVIER, MARTINEZ SANCHEZ,MARIA ALCAZAR, MUÑOZ MARTINEZ,VICTOR, REINA TEROL,ANTONIO JESUS, FERNANDEZ MADRIGAL,JUAN ANTONIO, MUÑOZ RAMIREZ,ANTONIO JOSE.
Vehículo robótico con capacidad de navegación autónoma dotado de brazo articulado para la manipulación remota de objetos. La presente invención consiste en una máquina programable de uso general compuesta de un vehículo con capacidad de navegación en interiores y de un brazo articulado dotado de una garra servo- controlada para el manejo remoto de objetos. El sistema robot comprende un sistema de manipulación autónomo, un sistema de locomoción que emplea ruedas, un sistema sensorial complejo y diverso, un sistema de control basado en una red de computadores, un sistema de alimentación eléctrica por baterías y un sistema de comunicaciones radio con estaciones remotas. El robot está preparado para desenvolverse en entornos estructurados, como edificios, almacenes o fábricas. Las tareas que es capaz de realizar el sistema robot incluyen coger, transportar y soltar pequeños objetos tales como libros o cintas de video y presionar o girar dispositivos sencillos como interruptores o picaportes.
PROCEDIMIENTO PARA LA REDUCCION DE CARGAS POR RAFAGAS EN UN AVION.
(01/05/2004) PROCEDIMIENTO PARA REDUCIR LAS CARGAS POR RAFAGAS QUE SURGEN EN UN AVION, EMPLEANDO ELEMENTOS DE AJUSTE QUE CONTRARRESTEN LAS CARGAS POR RAFAGAS QUE SE PRODUZCAN POR MEDIO DE UN AJUSTE, EN PARTICULAR DE TIMON DE DIRECCION, ALERONES EN LA PARTE INTERIOR DE LAS ALAS O SIMILARES, DONDE LA CARGA POR RAFAGA TOTAL ES EL RESULTADO DE LA SUMA DE LA CARGA BASE 1G Y DE LA CARGA ADICIONAL DEBIDA A LA RAFAGA QUE SE PRODUZCA, REGULANDOSE LOS ELEMENTOS DE AJUSTE EN FUNCION DE LA ALTURA DE VUELO, DE LA VELOCIDAD DE VUELO Y DEL PESO EN VUELO. CON EL FIN DE EVITAR LAS ALTAS VELOCIDADES DE AJUSTE NECESARIAS HASTA AHORA EN LOS ELEMENTOS DE AJUSTE SE LLEVA A CABO LA REGULACION DE LOS ELEMENTOS DE AJUSTE EN VUELO ASCENDENTE HASTA ALCANZAR…
PROCEDIMIENTO PARA DETERMINAR LA POSICION DE UN VEHICULO.
(16/04/2004). Ver ilustración. Solicitante/s: NOELL CRANE SYSTEMS GMBH. Inventor/es: KLEMENT, STEFAN.
Procedimiento para determinar la posición de un vehículo , preferiblemente de un apilador de pórtico , con relación a una grúa de contenedores, en el que un sensor sirve para la determinación de la posición del vehículo y dispositivos de evaluación están acoplados a un detector, caracterizado porque registra en ángulo y distancia, como ayuda de posicionamiento, los apoyos de una grúa de contenedores mediante como mínimo un escáner dispuesto en el vehículo y los datos registrados se retransmiten al dispositivo de evaluación, que compara estas señales con las señales existentes en su programa y por tanto, determina la posición exacta del vehículo respecto a los apoyos del contenedor, pudiendo desplazarse el vehículo, basado en esta determinación, a una posición teórica predeterminada exactamente respecto a los apoyos del contenedor.
SISTEMA Y METODO PARA EL CONTROL DE VEHICULOS.
(01/04/2004) Un sistema para conducir dos o más vehículos sobre una superficie, comprendiendo dicho sistema: - una unidad de control central provista al menos de un computador con memoria y un transmisor/receptor para comunicación con cada uno de los vehículos ; - elementos marcadores pasivos que son dispuestos en o sobre la superficie y que marcan posiciones (x, y) relativas a la superficie; y - dos o más vehículos que están, cada uno, provistos de medios de accionamiento para propulsar el vehículo, medios de dirección para el gobierno del mismo, medios de guiado para dirigir el vehículo, un transmisor/receptor para la comunicación con la unidad de control central, y medios…
PROCEDIMIENTO PARA LA GENERACION DE TRAYECTORIAS DE ACOPLAMIENTO, QUE PUEDE UTILIZARSE PARA GUIAR UN VEHICULO A UNA TRAYECTORIA FINAL PREDETERMINADA.
(16/03/2004) Procedimiento para la producción de al menos una trayectoria de acoplamiento para guiar un vehículo a una trayectoria final predeterminada, con: (a) Una producción de datos mediante una unidad dinámica de trayectorias, los cuales están en correlación funcional con datos de la al menos una trayectoria de acoplamiento. (b) Un mando de la unidad dinámica de trayectorias, mediante una unidad de regulación de la dinámica de trayectorias. (c) Una transmisión de los datos que están en correlación funcional con datos de la al menos una trayectoria de acoplamiento, desde la unidad dinámica de trayectorias a la unidad de regulación de la dinámica de trayectorias, para la formación de un circuito regulador cerrado. (d) Un cálculo de magnitudes de la trayectoria final en un módulo de conversión que está unido con la…
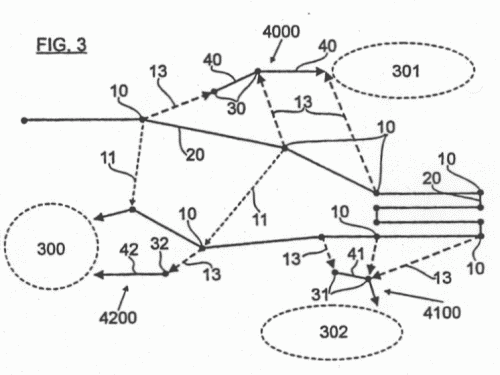
PROCEDIMIENTO DE REALIZACION QUE UTILIZA UN SISTEMA DE POSICIONAMIENTO GLOBAL.
(01/03/2004) Procedimiento de realización de una forma útil proyectada, tal como una capa de proyecto de carretera, a partir de un cuerpo existente delimitado por una envuelta tridimensional, tal como un terreno, construcción o una envuelta análoga, con la ayuda de una herramienta montada en una máquina , por ejemplo, una explanadora de tierra o análoga; cooperando esta máquina con un sistema de posicionamiento global por satélite de tipo bifrecuencia, diferencial, cinemático y en tiempo real, tal como el GPS; teniendo la máquina , al menos, un receptor de posicionamiento global (10; 10A; 10B), por ejemplo, en su herramienta , a fin de ser desplazada según un modelo teórico de la forma ;…
PROCEDIMIENTO Y DISPOSITIVO PARA LA DETECCION DE LA POSICION DE UN VEHICULO EN UNA ZONA ESPECIFICADA.
(01/02/2004) Procedimiento para la detección de la posición de un vehículo (F1-F4) en una zona especificada , en particular en una instalación de almacenamiento, que comprende estas etapas: detección de la magnitud y el ángulo de los vectores de movimientos incrementales del movimiento del vehículo (F1-F4) por medio de un primer dispositivo captador ; determinación automática de una posición de referencia respectiva del vehículo (F1-F4) en lugares predeterminados (O1-O4) dentro de la zona especificada cada vez que el vehículo (F1-F4) pasa por un lugar correspondiente (O1-O4); y detección de la posición actual del vehículo…
(01/01/2004). Ver ilustración. Solicitante/s: DYSON LIMITED. Inventor/es: BISSET, DAVID, LINDSEY, CLARK, ALAN, GERARD.
Vehículo autónomo que comprende ruedas para soportar el vehículo y para permitir al vehículo recorrer una superficie, sensores de rueda que miran hacia abajo para detectar la presencia de una superficie delante de las ruedas, un sensor adicional en un borde anterior del vehículo o cerca del mismo para detectar la presencia de una superficie debajo del borde anterior del vehículo y un aparato de control para controlar el movimiento del vehículo, estando el aparato de control preparado para permitir el movimiento del vehículo cuando el sensor del borde anterior detecta la ausencia de una superficie debajo del borde anterior del vehículo, siempre que los sensores de rueda indiquen la presencia de una superficie junto a la rueda.
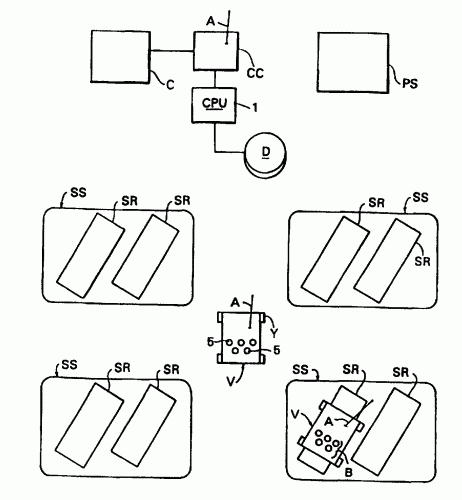
INSTALACION DE FABRICACION Y OPERACIONES DE PROCESO.
(16/03/2003). Ver ilustración. Solicitante/s: HECKETT MULTISERV PLC. Inventor/es: EVANS, DARREL, HECKETT MULTISERV PLC, KIRKWOOD, CLYDE, ALEXANDER, HECKETT MULTISERV PLC.
LA POSICION ABSOLUTA DE UN VEHICULO (V) QUE TRANSPORTA ARTICULOS ENTRE PUESTOS (SS) DE UNA INSTALACION, P. EJ. LOS TALLERES DE UNA ACERIA, SE DETERMINA POR MEDIO DE UNA SEÑAL DE NAVEGACION POR SATELITE Y SE REGISTRA EN UNA UNIDAD CENTRAL DE PROCESO CON UNA BASE DE DATOS PARA ASEGURAR QUE LOS ARTICULOS PREVISTOS (SR) SE PROCESEN EN LOS DIFERENTES PUESTOS SEGUN CORRESPONDA.
(16/03/2003). Solicitante/s: BAIL GMBH. Inventor/es: BAIL, GUNTHER, DR.
Sistema para el mando de un vehículo autopropulsado, caracterizado por los siguientes pasos: a) en la memoria de datos del vehículo se introducen los datos de posición de un trayecto seleccionado desde un lugar inicial a uno de destino; b) el vehículo recorre después automáticamente el trayecto predefinido, en el que b1) en un punto de partida recibe de un sistema de posicionamiento, la correspondiente señal actual de posición, compara esta con la posición almacenada del lugar inicial, y cuando los datos de posición no coinciden calcula a partir de estos la dirección y distancia al lugar inicial, y recorre este trayecto, y b2) acto seguido recibe datos sucesivos actuales de posición, y calcula para cada uno, la dirección y distancia a la siguiente posición almacenada, y recorre el trayecto correspondiente.
APARATO DE SEGUIMIENTO DEL MOVIMIENTO PARA VEHICULO AUTOGUIADO.
(01/01/2003). Solicitante/s: JERVIS B. WEBB INTERNATIONAL COMPANY. Inventor/es: ALOFS, DRENTH.
LA INVENCION SE REFIERE A UNA RUEDA GIRATORIA AJUSTADA CON SENSORES DE MEDIDA DEL ANGULO ROTACIONAL Y DE GIRO MONTADA EN UN VEHICULO SIN CONDUCTOR DE MANERA QUE EL MOVIMIENTO LATERAL DEL VEHICULO PUEDE SER DETECTADO Y ANOTADO MEDIANTE EL SISTEMA DE NAVEGACION Y GUIA DEL VEHICULO. UNA REALIZACION PREFERIDA DE LA INVENCION ES UN VEHICULO SIN CONDUCTOR QUE COMPRENDE UNA SISTEMA DE NAVEGACION Y GUIA QUE TIENE UN SENSOR DEL MOVIMIENTO ANGULAR Y UN DISPOSITIVO DE RUEDA GIRATORIA PARA EL SEGUIMIENTO DE LA TRAYECTORIA EQUIPADO CON UN SENSOR DE PIVOTADO DE LA RUEDA GIRATORIA Y UN SENSOR DE GIRO DE LA RUEDA PARA DETERMINAR LA POSICION RELATIVA DEL VEHICULO TENIENDO EN CUENTA SUBSTANCIALMENTE TODO EL MOVIMIENTO DEL VEHICULO A LO LARGO DE LA SUPERFICIE SOBRE LA CUAL SE ESTA MOVIENDO EL VEHICULO. ESTOS SENSORES HACEN POSIBLE QUE EL SISTEMA DE NAVEGACION DETERMINE MAS EXACTAMENTE LA POSICION ACTUAL DE LOS VEHICULOS Y HACEN POSIBLE QUE EL SISTEMA DE GUIA GUIE MEJOR EL VEHICULO.
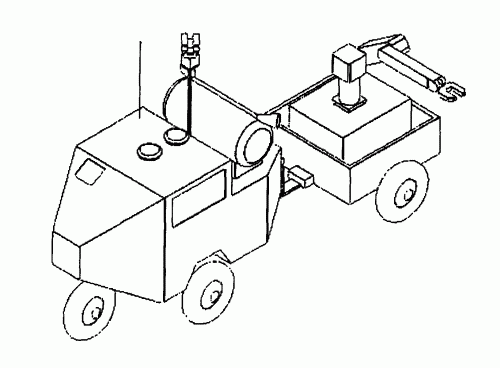
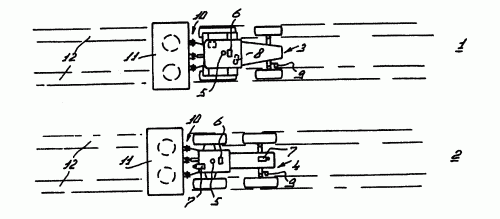
UNA COMBINACION DE VEHICULOS.
(01/12/2002). Ver ilustración. Solicitante/s: MAASLAND N.V.. Inventor/es: VAN DER LELY, OLAF.
ESTA INVENCION SE REFIERE A UN VEHICULO COMBINADO QUE COMPRENDE UN VEHICULO PRINCIPAL, COMO POR EJEMPLO UN TRACTOR AGRICOLA , CON UN SISTEMA DE CONTROL PARA CONTROLAR UNO O VARIOS VEHICULOS SATELITES . EL VEHICULO SATELITE ES UN VEHICULO SIN PILOTAR. MEDIANTE UN SISTEMA DE CONTROL, SE PUEDE CONTROLAR EL VEHICULO SATELITE RADIOGRAFICAMENTE. MEDIANTE EL SISTEMA DE CONTROL, QUE COMPRENDE MEDIOS DE CONMUTACION, SE PUEDE LANZAR EL PROGRAMA DE INSTRUCCIONES PARA HACER FUNCIONAR EL VEHICULO SATELITE.
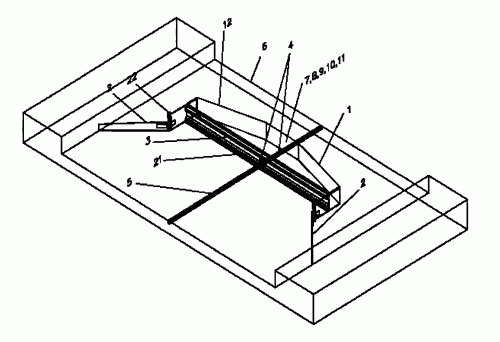
SISTEMA DE GUIADO PARA UN VEHICULO GUIADO DE FORMA AUTOMATICA.
(01/12/2002). Ver ilustración. Solicitante/s: JERVIS B. WEBB INTERNATIONAL COMPANY. Inventor/es: ALOFS, CORNELL W., DRENTH, RONALD R.
SE DESCRIBE UN SISTEMA DE GUIA PARA GUIAR UN VEHICULO GUIADO AUTOMATICAMENTE A LO LARGO DE UNA TRAYECTORIA, QUE INCLUYE RAILES PARA SUSTENTAR EL AGV A LAS PARTES GENERALMENTE RECTAS DEL RECORRIDO Y UN SISTEMA DE GUIA SIN RAILES PARA DIRIGIR EL AGV DESDE EL EXTREMO DE UN PRIMER SEGMENTO DE RAIL AL COMIENZO DE OTRO. LOS RAILES PROPORCIONAN EL NECESARIO NIVEL DE CONTROL PARA PERMITIR QUE UN VEHICULO AUTOMATICO SE DESPLACE A ALTAS VELOCIDADES, EN TANTO QUE EL SISTEMA DE GUIA SIN RAILES ELIMINA LA NECESIDAD DE UTILIZAR CAMBIOS DE RAIL QUE SERIAN NECESARIOS EN CASO CONTRARIO PARA DESPLAZAR UN VEHICULO GUIADO EN UN RAIL DE UNA PARTE DE RAIL A OTRA.
MEJORAS EN LOS ROBOTS MOVILES Y EN SU SISTEMA DE MANDO.
(01/10/2002) Sistema de guiado y de posicionamiento con respecto a una estación fija para robot móvil autónomo que hace intervenir por lo menos un haz infrarrojo direccional (2) emitido por la estación fija, estando provisto el robot móvil de un sistema de detección (10a, 10b) direccional de emisión infrarroja conectado a un microordenador incorporado en el mencionado robot, desplazándose el robot sobre una superficie de trabajo de forma esencialmente aleatoria, comprendiendo el microordenador un algoritmo apto para gobernar el retorno a la estación fija por desplazamiento del robot hacia la dirección…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}