CIP-2021 : G05D 1/02 : Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/02[1] › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/02 · Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP2021: Invenciones publicadas en esta sección.
(01/09/2002). Solicitante/s: HEATEC THERMOTECHNIK GMBH. Inventor/es: SCHWARZ, HANS-JOCHEN, DR., STENGEL, PETER.
Sensor de flujo , especialmente para la determinación de caudales de agua, con una carcasa en la que se han configurado un canal de circulación y un recinto interior , el cual está dividido en dos cámaras mediante una membrana , que se comunican con el canal de circulación a través de canales de control , con un imán sujeto a la membrana , el cual es portado y posicionado por la membrana , y con un elemento sensor colocado fuera del recinto interior , y que reacciona al desplazamiento del imán , caracterizado porque el canal de circulación está configurado como una tobera de venturi que forma un estrechamiento, y porque un canal de control se deriva del estrechamiento de la tobera de venturi, el cual está conectado con una de las cámaras.
METODO Y SISTEMA PARA DESCRIBIR, GENERAR Y COMPROBAR TRAYECTORIAS SIN CABLES PARA AUTOMOVILES GUIADOS DE FORMA AUTOMATICA.
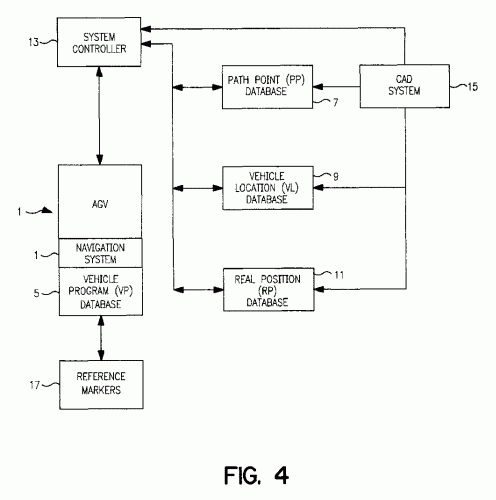
(01/07/2002). Ver ilustración. Solicitante/s: JERVIS B. WEBB INTERNATIONAL COMPANY. Inventor/es: ALOFS, CORNELL W., DRENTH, RONALD R., DRENTH, JUSTIN R.
PROCEDIMIENTO Y SISTEMA PARA CONTROLAR EL MOVIMIENTO DE UNO O MAS VEHICULOS GUIADOS AUTOMATICAMENTE, QUE INCLUYEN UN CONTROLADOR DE SISTEMA, UN NUMERO DE VEHICULOS GUIADOS AUTOMATICAMENTE SIN HILOS (AGV) Y MARCADORES DE POSICION COLOCADOS EN UN SUELO. EL CONTROLADOR DE SISTEMA SIRVE COMO DISTRIBUIDOR Y CONTROLADOR DEL TRAFICO DEL SISTEMA PROPORCIONANDO, EN UNA REALIZACION, COMUNICACION INALAMBRICA BIDIRECCIONAL A CADA AGV DEL SISTEMA. CADA AGV VA EQUIPADO CON UN SISTEMA DE NAVEGACION Y GUIA PARA CONTROLAR EL MOVIMIENTO DE LOS AGV A LO LARGO DE UN RECORRIDO DE GUIA PREESTABLECIDO. A LAS COORDENADAS Y LAS ABSCISAS DIFERENCIALES A PARTIR DE UNA BASE DE DATOS DE PUNTOS DEL RECORRIDO, ALMACENADA EN EL CONTROL DEL SISTEMA, SE COMUNICAN A UN DETERMINADO AGV, QUE PUEDE SEGUIR ENTONCES EL RECORRIDO DE GUIA PREESTABLECIDO. LA COMUNICACION DE SOLO LAS COORDENADAS Y ABSCISAS DIFERENCIALES PERMITE UN CONTROL PERFECCIONADO RESPECTO A SISTEMAS QUE UTILIZAN UN GRAN NUMERO DE AGV.
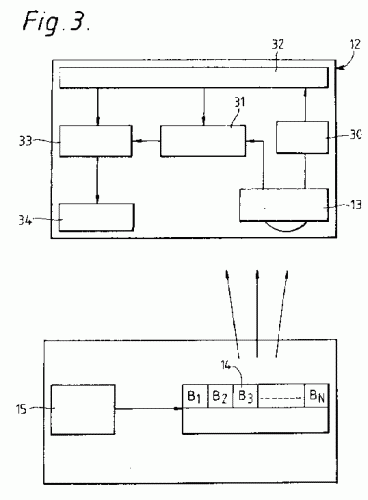
PROCEDIMIENTO Y DISPOSITIVO PARA LA REDUCCION DE UNA SERIE DE DATOS A SER TRANSMITIDA A PARTIR DE UN VEHICULO.
(16/03/2002). Solicitante/s: MANNESMANN AKTIENGESELLSCHAFT. Inventor/es: WIDL, ANDREAS.
EN UN PROCEDIMIENTO Y UN DISPOSITIVO PARA LA REDUCCION DE UNA CANTIDAD DE DATOS A SER TRANSMITIDOS A PARTIR DE UN VEHICULO, TALES COMO INFORMACIONES A TRAVES DE LA SITUACION DE OPERACION Y/O CONTENIENDO INFORMACION SOBRE EL MEDIO AMBIENTE DEL VEHICULO, Y DATOS DE POSICIONAMIENTO, QUE CONTIENEN INFORMACIONES A TRAVES DE LA POSICION DEL VEHICULO EN UN SISTEMA DE COORDINADAS PREDETERMINADO CON RESPECTO A UN PUNTO DE TIEMPO DETERMINADO, SE REDUCE DE TAL MODO EN CUANTO A LOS DATOS DE POSICION A SER TRANSMITIDOS, QUE DETERMINAN UNA PRIMERA RELACION DE VECTOR, QUE DESCRIBE LA VIA ELEGIDA POR EL VEHICULO EN EL INTERVALO, REDUCIENDOSE DE TAL MODO, QUE LOS DATOS DE POSICION REDUCIDOS DETERMINAN UNA SEGUNDA RELACION DE VECTOR Y SE VALORA LA DISTANCIA VERTICAL MAXIMA DE LOS VECTORES DE LA SEGUNDA RELACION DE VECTORES CON RESPECTO A LA PRIMERA RELACION DE VECTORES QUE ES MENOR QUE UN VALOR UMBRAL PREVIAMENTE DADO, Y ESTOS DATOS DE POSICION REDUCIDOS SE TRANSMITEN CON UNA ELECCION DE LOS DATOS DE VEHICULO ALMACENADOS.
SISTEMA PARA EL GUIADO AUTOMATICO DE VEHICULOS EN UN ENTORNO CONTROLADO.
(01/12/2001) El sistema propuesto hace posible el guiado automático de vehículos, convenientemente equipados, a través de un entorno conocido y dotado de sensores fijos. La función de guiado automático residirá en una unidad de proceso que tiene almacenados los datos sobre la geometría del lugar y que posee un sistema de comunicación bidireccional con el móvil. La invención se basa en dos enlaces de distinta naturaleza, uno vía radio y otro vía ultrasonidos. Los retardos de propagación de los ultrasonidos desde el emisor móvil hasta los sensores serán empleados por una unidad central de proceso para calcular las distancias a cada uno de los sensores; a partir de…
SISTEMA DE REFERENCIA PARA POSICIONAR UN VEHICULO BASADO EN LA COMUNICACION.
(16/11/2001) ESTA INVENCION SE REFIERE A UN SISTEMA DE REFERENCIA PARA POSICIONAR UN VEHICULO BASADO EN LA COMUNICACION QUE COMPRENDE UN TRAYECTO DE VEHICULO. ESTE TRAYECTO DE VEHICULO ESTA DIVIDIDO EN REGIONES, QUE COMPRENDEN UNA PARTE DEL TRAYECTO DE VEHICULO. CADA PARTE DEL TRAYECTO DE VEHICULO CONTENIDA EN UNA REGION RESPECTIVA ESTA DEFINIDA POR UNO O VARIOS SEGMENTOS. SE IDENTIFICA LA POSICION DE UN VEHICULO SOBRE EL TRAYECTO DE VEHICULO POR UN SISTEMA DE COORDENADAS LOCAL S XYZ , REPRESENT ANDO S UN IDENTIFICADOR DE VEHICULO, REPRESENTANDO X UNA REGION ESPECIFICA, REPRESENTADO Y UN SEGMENTO ESPECIFICO CONTENIDO EN DICHA REGION, Y REPRESNETANDO Z LA POSI CION DEL VEHICULO EN ESTE SEGMENTO ESPECIFICO. EL TRAYECTO DE VEHICULO PUEDE SER REPRESENTADO…
PROCEDIMIENTO PARA LA CREACION DE UN MAPA DE ENTORNO Y PARA LA DETERMINACION DE UNA POSICION PROPIA EN EL ENTORNO POR MEDIO DE UNA UNIDAD AUTOMOTRIZ.
(01/01/2000) LA INVENCION DESCRIBE UN PROCEDIMIENTO DE ORIENTACION Y DE ELABORACION DE MAPA PARA UNIDADES MOVILES, QUE SE MUEVEN EN UN ENTORNO DESCONOCIDO. PARA LA CORRECCION DE LA POSICION DE UNA UNIDAD MOVIL EN EL MAPA DEL ENTORNO Y LA SITUACION DE UNA MARCA DE TIERRA EN EL MAPA DEL ENTORNO SE PREDICE A PARTIR DE UNA POSICION DETERMINADA, EN BASE A LA HISTORIA PREVIA DE MOVIMIENTO, UNA DISTANCIA DETERMINADA CON RESPECTO A LA MARCA DE TIERRA, Y BASADO EN LA POSICION ACTUAL SE MIDE UNA DISTANCIA DETERMINADA CON RESPECTO A LA MARCA DE TIERRA. ESTA DIFERENCIA, QUE APARECE ENTRE LA DISTANCIA PREDECIDA Y MEDIDA CON RESPECTO A LA MARCA DE TIERRA, SE CARACTERIZA COMO FALLO DE SISTEMA.…
SISTEMA PARA EL CONTROL AUTOMATICO DEL RECORRIDO EN LOS CARROS DE TRANSPORTE AUTOPROPULSADOS DE GUIADO AUTOMATICO.
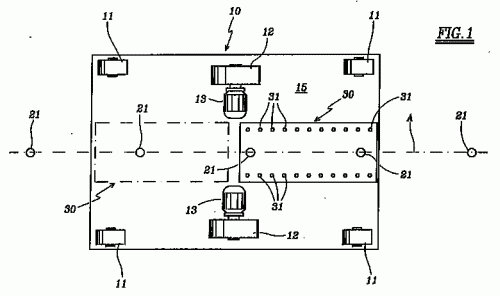
(16/11/1999). Ver ilustración. Solicitante/s: FERRARI,PAOLA. Inventor/es: FERRARI,PAOLA.
Sistema para el control automático del recorrido en los carros de transporte autopropulsados de guiado automático. El carro comprende unos medios adecuados para variar su dirección de avance, de manera que se mantenga en una posición en la que un eje de referencia (A) del mismo queda alineado con un recorrido preestablecido definido por medios colocados en posición fija, y comprende una pista fija constituida por una pluralidad de imanes uniformemente distanciados entre sí, dispuestos en posición fija a lo largo del recorrido preestablecido, por lo menos un dispositivo de detección , solidario al carro, dispuesto a uno y otro lado del eje de referencia (A), adecuado para detectar el desplazamiento de este eje (A) con respecto a la posición de los imanes más cercanos y para activar los medios de variación de la dirección a fin de anular el desplazamiento.
SISTEMA DE GUIA PARA UN VEHICULO AUTOPROPULSADO CON DISPOSITIVO EMISOR MOVIL SEPARADO Y PROCEDIMIENTO PARA EL MANDO DEL VEHICULO.
(16/04/1999) LA INVENCION SE REFIERE A UN VEHICULO DE GOLF Y A UNA UNIDAD DE EMISION MOVIL QUE ES OPERADA POR LA PERSONA QUE JUEGA AL GOLF. EL VEHICULO Y LA UNIDAD TRANSMISORA COMPRENDE CADA UNA DE ELLAS UN RECEPTOR Y UNA UNIDAD DE EVALUACION PROVISTO CON UN ORDENADOR PARA SISTEMA DE POSICIONAMIENTO CONTROLADO CON SATELITE. EL SEGUNDO RECEPTOR Y LAS UNIDADES DE EVALUACION CALCULAN LA POSICION RESPECTIVA DEL JUGADOR DE GOLF Y EL VEHICULO CON RESPECTO A LAS SEÑALES RECIBIDAS CICLICAMENTE A PARTIR DEL SISTEMA SATELITE. LA UNIDAD DE TRANSMISOR MOVIL ESTA PROVISTA CON UN TRANSMISOR SOPORTADO MANUALMENTE DE ALTA FRECUENCIA POR MEDIO DEL CUAL PUEDEN SER TRANSMITIDAS CICLICAMENTE LAS POSICIONES DEL JUGADOR DE GOLF AL VEHICULO. EN CADA CASO EL ORDENADOR DEL VEHICULO CALCULA LA DIRECCION Y DISTANCIA DEL JUGADOR DE GOLF Y ACUMULA ESTOS DATOS HASTA QUE SE DESPLAZA…
TRANSMISION DE SEÑALES DE CONTROL EN UN VEHICULO CON INTERRUPTORES DE CHOQUE.
(16/03/1999). Solicitante/s: TELELIFT GMBH. Inventor/es: TYLER, TOMMY N.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO PARA LA UTILIZACION DE UN DISPOSITIVO DE DETECCION DE OBSTACULOS, QUE ESTA PREVISTO EN UN VEHICULO DE TRANSPORTE AUTOMATICO, PARA SU UTILIZACION COMO DISPOSITIVO DE INICIACION EN LA GUIA DE UNA MULTIPLICIDAD DE CODIGOS DE CONTROL PREDETERMINADOS PARA UN CONTROL DEL VEHICULO. CADA CODIGO SE REFIERE A UN COMPORTAMIENTO DEL VEHICULO PREDETERMINADO, QUE SE REGULA POR MEDIO DEL CONTROL. SE DA A CONOCER UN CONJUNTO INDUDABLE DE TALES CODIGOS PARA EL PRINCIPIO DE UN MOVIMIENTO HACIA ADELANTE, QUE ES EL PRINCIPIO DE UN MOVIMIENTO HACIA ATRAS Y LA PARADA DEL VEHICULO. ABARCA ADEMAS EL CONJUNTO UNA CANTIDAD DE CODIGOS QUE ESTAN DETERMINADOS EXCLUSIVAMENTE PARA EL PERSONAL DE MANTENIMIENTO. ESTOS CODIGOS APARECEN SOLAMENTE DE FORMA IMPROBABLE DE UN FUNCIONAMIENTO NORMAL DE VEHICULO.
UN SISTEMA DE AYUDA AL CONDUCTOR PARA UN VEHICULO.
(16/05/1997). Solicitante/s: LUCAS INDUSTRIES PUBLIC LIMITED COMPANY. Inventor/es: APPLEYARD, MICHAEL, WILSON JONES, RUSSELL, TRIBE, RAGLAN HORATIO ANDREW HAROLD.
SE MONTAN UNA CAMARA DE VIDEO O DETECTOR EQUIVALENTE EN UN VEHICULO Y SE UTILIZAN PARA DETECTAR LAS MARCAS VIALES COLOCADAS EN LA CARRETERA (NORMALMENTE LAS LINEAS PINTADAS DE BLANCO). UN PROCESADOR DE SEÑALES ASOCIADO ESTIMA LA POSICION LATERAL DEL VEHICULO EN RELACION A LAS MARCAS VIALES. SE UTILIZA UN MOTOR ELECTRICO ACOPLADO AL MECANISMO DE LA DIRECCION PARA PROPORCIONAR UNA ENTRADA DE PAR A LA DIRECCION QUE PUEDE BIEN AYUDAR U OPONERSE AL PAR DE LA DIRECCION DEL CONDUCTOR. EL PROCESADOR ESTA DISEÑADO PARA QUE AYUDE AL CONDUCTOR A MANTENER LA POSICION VIAL DEL VEHICULO A BASE DE MANTENER AL VEHICULO EN UN PUNTO PREESTABLECIDO UTILIZANDO UN PAR DE POLARIZACION. ESTO SIMULA EL EFECTO DE QUE LA VIA SE INCLINA HACIA ARRIBA HACIA LOS BORDES VIALES. NO OBSTANTE EL CONDUCTOR PUEDE ANULAR O CANCELAR EL EFECTO SI APLICA UN PAR DE DIRECCION QUE SOBREPASE UN VALOR UMBRAL DEL PAR PREDETERMINADO.
SISTEMA DE GUIA Y DE SEGUIMIENTO DEL DESTINO PARA VEHICULOS.
(16/01/1997). Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: SIEGLE, GERT, BRAEGAS, PETER, ZECHNALL, WOLF.
SE PROPONE UN SISTEMA DE CONDUCCION Y DE GUIA PARA VEHICULOS, EN EL QUE EL DESTINO PUEDE SER INTRODUCIDO EN UN APARATO DEL VEHICULO POR MEDIO DE LA INTRODUCCION DEL DATO DEL LUGAR DEL DESTINO Y DE LA CALLE. EL APARATO DEL VEHICULO ESTA EN CONTACTO CON UN EQUIPO BALIZA, EN EL QUE ESTAN MEMORIZADOS, RESPECTO A LOS DIFERENTES LUGARES DE DESTINO, LOS NOMBRES DE LAS CALLES ASI COMO LOS CORRESPONDIENTES PARES DE COORDENADAS. EN CASO DE DEMANDA DEL APARATO DEL VEHICULO, EL EQUIPO BALIZA BUSCA LOS CORRESPONDIENTES PARES DE COORDENADAS Y LOS TRANSMITE AL APARATO DEL VEHICULO. JUNTO CON EL TELEGRAMA TRANSMITIDO PUEDEN SER TRANSMITIDOS OTROS DATOS, QUE CONTIENEN POR EJEMPLO INFORMACION SOBRE EL TRAFICO O PLANOS DE LAS CALLES. EL SISTEMA TAMBIEN ES APLICABLE PARA EL CALCULO AUTOMATICO DEL PEAJE.
PROCESO DE CALZADO, SOBRE UNA TRAYECTORIA TEORICA, PARA UN VEHICULO MODIFICANDO LA CURVATURA DE LA TRAYECTORIA REAL.
(01/11/1996). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: DETRICHE, JEAN-MARIE, MICAELLI, ALAIN.
PROCESO DE CALZADO DE UN VEHICULO SOBRE UNA TRAYECTORIA TEORICA (T SUB TH2) QUE CONSISTE, DURANTE UN TRAMO DE REUNION S SUB 1, EN MODIFICAR PROGRESIVAMENTE LA CURVATURA DE LA TRAYECTORIA DEL VEHICULO EN FUNCION DEL RUMBO (THETA) Y DE LA CURVATURA INSTANTANEOS. NO HAY PUES DISCONTINUIDADES DE ORIENTACION A LO LARGO DE LA TRAYECTORIA, LO QUE NO IMPONE CONDICIONES DE FUNCIONAMIENTO IMPOSIBLES A LOS ORGANOS DEL VEHICULO Y PERMITE SIN EMBARGO CONVERGER RAPIDAMENTE SOBRE DICHA TRAYECTORIA TEORICA. APLICACION, ESPECIALMENTE EN LOS VEHICULOS ROBOTIZADOS SIN PILOTO.
SISTEMA DE CONTROL DE UN VEHICULO PARA VIAS CON MULTIPLES RAMIFICACIONES.
(01/03/1996). Solicitante/s: DAIFUKU CO., LTD.. Inventor/es: TANIZAWA, HIDEICHI, WATANABE, YOSHITAKA.
SE DESCRIBE UN SISTEMA DE CONTROL DE UN VEHICULO PARA UNA VIA CON RAMIFICACIONES MULTIPLES. EL SISTEMA TIENE UNA VIA DE TRANSPORTE PRINCIPAL PARA GUIAR A UN VEHICULO, UNA UNIDAD DE ALMACENAMIENTO DISPUESTA ANTES DE UN PUNTO DE RAMIFICACION Y DATOS ALMACENADOS PARA GUIAR SELECTIVAMENTE GUIAR AL VEHICULO A UNA DE UNA PLURALIDAD DE VIAS RAMIFICADAS, Y UNA UNIDAD RECTORA DE DATOS MONTADO EN EL VEHICULO Y PARA LEER LOS DATOS ALMACENADOS EN LA UNIDAD DE ALMACENAMIENTO. LA UNIDAD DE ALMACENAMIENTO, ALMACENA DATOS DE DIRECCIONES DE RAMIFICACION DE LAS VIAS RAMIFICADAS Y MAS DATOS DE DIRECCIONES DE ESTACIONES INCLUIDAS EN LAS RESPECTIVAS VIAS RAMIFICADAS, ESTANDO LOS DATOS Y DATOS POSTERIORES, RELACIONADOS UNOS CON OTROS.
PROCEDIMIENTO PARA EL MANDO DE UNA CAJA DE CAMBIO DE MANIOBRA AUTOMATICA DE UN VEHICULO AUTOMOVIL.
(01/02/1996). Solicitante/s: DR.ING. H.C.F. PORSCHE AKTIENGESELLSCHAFT. Inventor/es: PETERSMANN, JOSEPH, SEIDEL, WILLI.
SE DESCRIBE UN PROCESO PARA EL CONTROL DE UNA CAJA DE CAMBIOS ACCIONADA ELECTRO-HIDRAULICAMENTE DE UN VEHICULO EQUIPADO CON UN MOTOR DE COMBUSTION INTERNA. DE ACUERDO CON ESTE PROCESO, DURANTE EL FRENADO TIENE LUGAR UN GRADUAL CAMBIO A VELOCIDAD MAS BAJA. EL CAMBIO A VELOCIDAD MAS BAJA SE REALIZA, EN PARTICULAR, CUANDO EN EL APROXIMADO A CURVAS SE ACTIVA UN ESTADO PARA EL BLOQUEO DE CAMBIO A MARCHA MAS ALTA. EL BLOQUEO DE CAMBIO A MARCHA MAS ALTA SE INTRODUCE CON RETIRADA RAPIDA DEL PIE DEL PEDAL DE ACELERACION DURANTE LA ACELERACION. EL BLOQUEO DE CAMBIO A MARCHA MAS ALTA SE SUPRIME TAN PRONTO COMO DESPUES DE TRANSCURRIDO UN PERIODO DE TIEMPO Y DESPUES DE RECONOCIDO EL MODO DE SERVICIO DE TRACCION SIN QUE SE HAYA RECORRIDO CURVA ALGUNA. AL FINALIZAR EL BLOQUEO DE CAMBIO A MARCHAS MAS ALTAS, SE REALIZA UNA ADAPTACION ESCALONADA DE LA VELOCIDAD AL ESTANDAR DADO EN EL DIAGRAMA CARACTERISTICO DEL CAMBIO DE VELOCIDADES.
SISTEMA Y PROCEDIMIENTO DE NAVEGACION PARA CONDUCCION SIN ALAMBRE CONDUCTOR DE TRANSPORTADORES SOBRE SUELO SIN CONDUCTOR.
(01/08/1995) EN UN SISTEMA Y PROCEDIMIENTO PARA CONDUCCION SIN ALAMBRE CONDUCTOR DE TRANSPORTADORES SOBRE SUELO SIN CONDUCTOR DE CUALQUIER CONFIGURACION DE RUEDAS, SE COLOCAN A LO LARGO DE UNA VIA DE REFERENCIA PUNTOS DE APOYO DE NAVEGACION (P) EN CADENA DE FORMACION LINEAL, CUYAS DISTANCIAS REGULARES Y/O IRREGULARES ASCIENDEN A UN MULTIPLO DEL ESTADO DE LA RUEDA DEL VEHICULO . LOS PUNTOS DE APOYO DE NAVEGACION (P) ESTAN FORMADOS COMO ACTIVOS Y/O PASIVOS SOPORTES DE DATOS DE UN SISTEMA DE IDENTIFICACION Y SE SUMERGEN EN LA SUPERFICIE DE LA CALZADA . LAS CURVAS DE VIA TEORICO ASI COMO COORDINADAS DE LOS PUNTOS DE APOYO DE NAVEGACION (P) SE ALMACENAN EN UN SISTEMA DE COORDENADAS (X,Y, ) FIJO COMO JUEGO DE DATOS GEOMETRICOS Y MEDIANTE UN SENSOR INTERNO EN EL VEHICULO, MAGNETOSTRICTIVO SE MIDE LA ABSOLUTA SITUACION DEL ANGULO GAMMA DEL TRANSPORTADOR SOBRE…
PROCEDIMIENTO DE CREACION O DE RESTITUCION DE UN TRAYECTO POR UN VEHICULO Y VEHICULO ADAPTADO A ESTE PROCEDIMIENTO.
(16/01/1995). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: DETRICHE, JEAN-MARIE.
PROCESO DE CREACION O DE RESTITUCION DE UN TRAYECTO POR UN VEHICULO ENTRE OBSTACULOS (B). EL VEHICULO PASA POR MOJONES DE REFERENCIA (M) POCO NUMEROSOS, EVENTUALMENTE SEMEJANTES ENTRE SI Y QUE SIRVEN PARA ACTIVAR FUNCIONES DE CONDUCCION QUE COMPRENDEN EN PARTICULAR EL SEGUIMIENTO LATERAL A DISTANCIA DETERMINADA DE LOS OBSTACULOS (B). EL VEHICULO ESTA DOTADO DE DETECTORES DE PROXIMIDAD PARA LOS OBSTACULOS Y DE DETECTORES DE REFERENCIA PARA LOS MOJONES ASI COMO DE UN SISTEMA DE CONTROL. APLICACION EN LA ROBOTICA.
AUTOPILOTO CON AJUSTE DE TIEMPO ADAPTATIVO PARA VASOS MARINOS.
(01/11/1994). Solicitante/s: SPERRY MARINE INC. Inventor/es: WESNER, CHARLES R.
EL INVENTO TRATA DE UN APARATO PARA MANTENER LA DIRECCION DE AUTOPILOTOS DE NAVIOS MARINOS QUE COMPARA EL RMS DE LA GUIÑADA A UNA DIVERSIDAD DE INCREMENTOS DE GUIÑADA Y COMPARA LA GUIÑADA INSTANTANEA A UNA DIVERSIDAD DE INCREMENTOS DE GUIÑADA PARA PROPORCIONAR RESPECTIVAMENTE SEÑALES DE CONTROL DE LA GANANCIA DE ACUERDO CON LOS INCREMENTOS EN LOS QUE RESIDE EL RMS DE LA GUIÑADA Y DE LA GUIÑADA INSTANTANEA. LA SEÑAL DE CONTROL DE LA GANANCIA REPRESENTATIVA DE LA MAYOR GANANCIA ES SELECCIONADA PARA CONTROLAR LA GANANCIA DEL AUTOPILOTO.
DISPOSITIVO AUTOCORRECTOR DE TRAYECTORIA.
(16/09/1994). Solicitante/s: ARGILES VILALTA,ENRIC.
DISPOSITIVO AUTOCORRECTOR DE TRAYECTORIA, PARA GUIAR UN VEHICULO SIN CONDUCTOR A LO LARGO DE UN RECORRIDO BALIZADO, CARACTERIZADO POR EL HECHO DE QUE COMPRENDE MEDIOS DE CONTROL, MEDIOS DE DETECCION DE LA PROXIMIDAD DEL VEHICULO A UNA BALIZA, Y MEDIOS DE DETECCION DEL GIRO DE LA DIRECCION DEL VEHICULO, ACTUANDO LOS MEDIOS DE CONTROL SOBRE EL ACCIONAMIENTO DE LA DIRECCION DE ACUERDO CON LAS SEÑALES RECIBIDAS DE DICHOS MEDIOS DE DETECCION DE LA PROXIMIDAD DEL VEHICULO A UNA BALIZA Y DE DICHOS MEDIOS DE DETECCION DEL GIRO DE LA DIRECCION, DE FORMA QUE LOS PRIMEROS PROVOCAN UNA DESVIACION DE LA TRAYECTORIA DEL VEHICULO EN ALEJAMIENTO DE LA BALIZA Y LOS SEGUNDOS CORRIGEN DICHA DESVIACION, MANTENIENDOLA DENTRO DE UNOS LIMITES PREDETERMINADOS.
METODO Y APARATO PARA LA NAVEGACION OPTICA POR LASER.
(16/07/1994). Solicitante/s: ARNEX HANDELSBOLAG. Inventor/es: OLSEN, BENGT OLOF.
DE ACUERDO CON UN METODO DE NAVEGACION OPTICA POR LASER Y HAZ DE LUZ GIRATORIO EN FORMA DE UN DISCO VERTICAL SE EMITE DESDE UNA UNIDAD SENSORA . LA LUZ REFLEJADA DE LOS REFLECTORES SE REGISTRA POR LA UNIDAD SENSORA Y SE PROCESA MEDIANTE UN COMPUTADOR PARA LA DETERMINACION DE LA POSICION. EN UN DISPOSITIVO DISEÑADO PARA IMPLEMENTAR EL METODO LA UNIDAD SENSORA COMPRENDE MEDIOS (6, 6A, 7) QUE ESTAN DISPUESTOS PARA EMITIR UN HAZ DE LUZ EN FORMA DE DISCO VERTICAL. EL DISPOSITIVO TAMBIEN COMPRENDE MEDIOS PARA MEDIR LA POSICION DEL ANGULO DE ELEVACION DEL DISPOSITIVO DE UN TRANSDUCTOR DE ANGULOS PARA DETERMINAR LA POSICION DEL ANGULO LATERAL. UN PRIMER COMPUTADOR EFECTUA UNA OPERACION DE ANALISIS DE IMAGEN Y UN SEGUNDO COMPUTADOR EJECUTA LOS CALCULOS DE DETERMINACION DE NAVEGACION SOBRE LA BASE DE LA INFORMACION RECIBIDA DEL PRIMER COMPUTADOR.
CONTROL DE VEHICULO AUTOMATIZADO.
(01/01/1994). Solicitante/s: THE GENERAL ELECTRIC COMPANY, P.L.C. Inventor/es: ROBERTS, MALCOLM THOMAS, ROBINS, MICHAEL PHILIP, SHARROTT, IAN EDWARD.
UN SISTEMA DE GUIADO DE VEHICULO AUTOMATIZADO QUE INCLUYE UN COMPUTADOR PARA GENERAR SEÑALES PARA CONTROLAR UN NUMERO DE VEHICULOS PARA LLEVAR A CABO MOVIMIENTOS DENTRO DE UN AREA PREFIJADA . LAS SITUACIONES DE IDENTIFICACION DE LOS DATOS DE PUNTOS HIPOTETICOS (16-22; A-D) SOBRE EL PISO DEL AREA SE INTRODUCEN DENTRO DEL COMPUTADOR JUNTO CON PARES DE ESPECIFICACIONES DE TABLAS DE ESTOS PUNTOS ENTRE CUYOS MOVIMIENTOS PUEDEN SER REQUERIDOS, Y QUE ESPECIFICAN CUAL DE LOS OTROS MOVIMIENTOS ENTRE PARES DE PUNTOS SE PUEDE CONSIDERAR COMO POTENCIAL PARA UNA COLISION ENTRE VEHICULOS CUANDO SE EFECTUA ALGUN MOVIMIENTO EN PARTICULAR. CUANDO SE SOLICITA UN MOVIMIENTO AL VEHICULO, EL COMPUTADOR DETERMINA DESDE LA TABLA OTROS MOVIMIENTOS QUE SE PUEDEEN CONSIDERAR, Y AVERIGUA SI ALGUNO DE TALES MOVIMIENTOS SE EFECTUA EN ESTE INSTANTE. ASI, EL COMPUTADOR INHIBE EL MOVIMIENTO SOLICITADO POR EL VEHICULO O PERMITE TAL MOVIMIENTO.
DISTRIBUIDOR HIDRAULICO ROTATIVO.
(16/12/1993) DISTRIBUIDOR HIDRAULICO ROTATIVO. COMPRENDE UN ELEMENTO ROTATIVO PRIMARIO , ACOPLADO A UN DISPOSITIVO DE ACCIONAMIENTO Y CONECTADO EN ROTACION CON UN ROTOR DE VALVULA, Y UN ELEMENTO ROTATIVO SECUNDARIO , ACOPLADO A UN DISPOSITIVO ACCIONADO Y CONECTADO EN ROTACION CON UN ESTATOR DE VALVULA, PERMITIENDOSE UN LIMITADO DESPLAZAMIENTO ANGULAR RELATIVO ENTRE DICHOS ELEMENTOS PRIMARIO Y SECUNDARIO , HACIA AMBOS LADOS CON RESPECTO A UNA POSICION CENTRAL DE REPOSO, ESTANDO PREVISTOS MEDIOS DE REACCION PARA EMPUJAR EL ELEMENTO PRIMARIO HACIA LA POSICION CENTRAL DE REPOSO, Y SE CARACTERIZA POR EL HECHO DE QUE LOS MEDIOS DE REACCION CONSISTEN EN UN PAR DE PISTONES INDEPENDIENTES, SUSTANCIALMENTE EN FORMA DE ,…
SISTEMA PARA EL MANDO DE UNA AERONAVE EN ROTACION Y CABEZADA.
(01/07/1993). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE, SOCIETE ANONYME DITE:. Inventor/es: FARINEAU, JACQUES.
SEGUN EL INVENTO, ESTE SISTEMA TIENE: - UN DISPOSITIVO SUSCEPTIBLE DE ELABORAR A PARTIR DE LAS SEÑALES ELECTRICAS RESPECTIVAMENTE REPRESENTATIVAS DE LA POSICION DE UN PRIMER ORGANO DE ACCIONAMIENTO VOLUNTARIO DE LA VELOCIDAD DE GIRO, DE LA SUSTENTACION, DE LA VELOCIDAD DE CABECEO, DEL DESLIZAMIENTO LATERAL Y DE LA POSICION DE UN SEGUNDO ORGANO DE ACCIONAMIENTO VOLUNTARIO ; - UNA ORDEN ELECTRICA UNICA DE MANDO EN GIRO FORMADA POR UNA COMBINACION LINEAL DE DICHAS SEÑALES ELECTRICAS; - UN DISPOSITIVO SUSCEPTIBLE DE ELABORAR, A PARTIR DE DICHAS SEÑALES ELECTRICAS, UNA ORDEN ELECTRICA DE MANDO EN CABECEO FORMADA POR UNA COMBINACION LINEAL DE DICHAS SEÑALES ELECTRICAS; Y UN DISPOSITIVO QUE PERMITE COMBINAR DICHA ORDEN ELECTRICA DE MANDO EN CABECEO Y UNA ORDEN MECANICA QUE PROVIENE DIRECTAMENTE DE DICHO SEGUNDO ORGANO DE ACCIONAMIENTO VOLUNTARIO.
PROCEDIMIENTO Y SISTEMA DE CONTROL DE POSICION Y DIRECCION DE VEHICULOS.
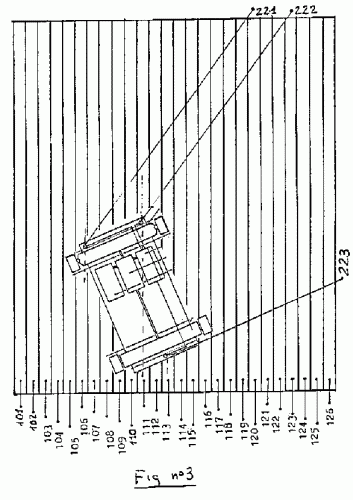
(16/10/1992). Ver ilustración. Solicitante/s: CARAMES JIMENEZ,JOSE ANTONIO.
PROCEDIMIENTO Y SISTEMA DE CONTROL DE POSICION Y DIRECCION DE VEHICULOS. EL PROCEDIMIENTO UTILIZA UN SISTEMA FORMADO POR UN CIRCUITO CUYOS TRAMOS ESTAN DOTADOS DE UN SUELO DIVIDIDO EN BANDAS LONGITUDINALES (101 A 126) DOTADAS CADA UNA DE UNA CARACTERISTICA PECULIAR QUE LAS DIFERENCIA, UNA UNIDAD DE ORDENES O GRUPO DE MANDOS, Y POR UN VEHICULO DOTADO DE SISTEMAS DE IMPULSION, CAMBIO DE DIRECCION Y DE LECTURA Y DETECCION DE LA POSICION, DOTADO ESTE DE UNOS SENSORES (221, 222 Y 223) QUE DETECTAN LA CARACTERISTICA PECULIAR DE LA BANDA SOBRE LA QUE ESTAN SITUADOS CADA UNO. ESTOS DIFERENTES SISTEMAS ESTAN CONTROLADOS POR UNA UNIDAD DE PROCESO Y CONTROL, QUE OPERA BASANDOSE EN LA INFORMACION DEL SISTEMA DE LECTURA SOBRE LA POSICION DEL VEHICULO Y LAS ORDENES DE LA UNIDAD DE ORDENES. DE APLICACION EN USOS QUE REQUIERAN UN CONTROL DINAMICO DEL VEHICULO.
UN METODO PARA CONTROLAR UNO O MAS VEHICULOS GUIADOS AUTOMATICAMENTE Y SISTEMA AUTOMATICO DE GUIA DE ESTOS VEHICULOS.
(16/04/1990). Ver ilustración. Solicitante/s: THE SECRETARY OF STATE FOR TRADE AND INDUSTRY IN HER BRITANNIC MAJESTY'S GOVERNMENTOF THE GB. Inventor/es: JACKSON, DOUGLAS, ROBERTSON, ANDREW RAE.
METODO PARA CONTROLAR UNO O MAS VEHICULOS GUIADOS AUTOMATICAMENTE Y SISTEMA AUTOMATICO DE GUIA DE ESTOS VEHICULOS. SE UTILIZAN FAROS , RECEPTORES Y UN SISTEMA DE CONMUTACION SECUENCIAL DE FORMA QUE PUEDEN TOLERARSE LOS EFECTOS DE AVERIAS O DE FAROS O RECEPTORES ENMASCARADOS. LOS FAROS EMITEN SEÑALES SECUENCIALMENTE, SIENDO IGUALES LOS INTERVALOS ENTRE SEÑALES CONSECUTIVAS HASTA QUE SE HA HECHO QUE TODOS LOS FAROS EMITAN SEÑALES, ENTONCES, DESPUES DE UN PRIMER TIEMPO DE PAUSA DE UN PRIMER NUMERO ENTERO DE INTERVALOS, LOS FAROS EMITEN SEÑALES EN ORDEN INVERSO, Y DESPUES DE QUE SE HA HECHO QUE TODOS LOS FAROS EMITAN SEÑALES, TRAS UN SEGUNDO TIEMPO DE PAUSA DE UN SEGUNDO NUMERO ENTERO DE INTERVALOS, SE REPITEN LAS ETAPAS. LOS NUMEROS ENTEROS PRIMERO Y SEGUNDO DIFIEREN EN UN NUMERO IMPAR. EL INVENTO ES APLICABLE AL MOVIMIENTO DE MERCANCIAS EN FABRICAS Y ALMACENES.
PROCEDIMIENTO PARA EL RECONOCIMIENTO DE CAMBIOS EN EL ESPACIO DE VIAJE DE UN VEHICULO SIN CONDUCTOR.
(01/02/1990). Solicitante/s: CARL SCHENCK AG. Inventor/es: SCHULZE, EKKEHARD, VON SEELEN, WERNER, PROF. DR., STOHRJOHANN, KAI.
EN UN PROCEDIMIENTO PARA EL RECONOCIMIENTO DE CAMBIOS EN EL ESPACIO DE VIAJE EN UN SISTEMA DE TRANSPORTE DURANTE UN VIAJE, MEDIANTE TOMAS SIN CONTACTO, CON TRATAMIENTO DE VALORES DE MEDICION PARA EL MANDO DEL SISTEMA DE TRANSPORTE, CADA CAMBIO ESPACIAL EMITE UNA SEÑAL CON UNA SERIE DE IMAGENES MEDIANTE UNA VIDEOCAMARA DELANTE DEL VEHICULO. DURANTE EL TIEMPO DE DIFERENCIA REAL ENTRE LAS IMAGENES SE AVERIGUAN LAS DIFERENCIAS Y SE MANDAN ORDENES DE MANEJO AL SISTEMA DE TRANSPORTE SIN CONDUCTOR, PARA EVITAR UNA COLISION CON EL OBSTACULO.
CABEZAL DE LECTURA PERFECCIONADO, PARA APARATOS MEDIDORES DEL CAUDAL DE UN FLUIDO.
(01/05/1988) 1. Cabezal de lectura perfeccionado, para aparatos medidores del caudal de un fluido, de los constituidos en un cuerpo-carcasa que aloja en su interior a los mecanismos medidores propiamente dichos, del tipo monobloque estraíble sin necesidad de un desmontaje total, y que a va unido invariablemente a la conducción mediante brida portando en sí mismo una tapa precintable y una tapa de cierre, caracterizado porque incluye: a) unos tornillos multifuncionales, que además de unir entre sí la tapa precintable y el cuerpo -carcasa, realizan al menos otra función característica, b) medios para permitir la lectura óptica , eléctrica, electrónica o mangética en el medidor, medios físicos que permiten acoplar detectores de movimiento para enviar información a distancia,…
UN METODO CON SU DISPOSITIVO CORRESPONDIENTE PARA CONTROLAR UN VEHICULO DE TRABAJO SIN CONDUCTOR.
(16/11/1986). Solicitante/s: EATON-KENWAY, INC..
METODO Y DISPOSITIVO PARA CONTROLAR UN VEHICULO DE TRABAJO SIN CONDUCTOR. COMPRENDE: A) GENERAR DATOS EN UNA FUENTE; B) COMUNICAR LOS DATOS DE A) A UN ELEMENTO TRANSMISOR; C) TRANSFORMAR LOS DATOS DE B) EN SEÑALES DE RECEPCION; D) MEMORIZAR LOS DATOS DE C) EN RESPUESTA A DATOS DE LA FUENTE; E) ALMACENAR JUEGOS DE INFORMACION A PARTIR DE LOS DATOS DE D); F) INDICAR EL JUEGO DE INFORMACION REPRESENTATIVO DE LA ONDA REQUERIDO EN UN TIEMPO PREESTABLECIDO. CONSTA DE: UNA SECCION COMPUTADORA DE VEHICULOS Y UN CIRCUITO DE COMUNICACION FORMADO POR UNA SECCION CONDUCTORA DE LINEA , UNA SECCION RECEPTIVA , UNA SECCION DE CONTROL RECEPTORA , UNA SECCION TRANSMISORA Y UNA UNION PARA HILO DE GUIA.
INSTALACION PARA OBJETOS MOVILES, LIGADOS A UNA SUPERFICIE HORIZONTAL, PARA LA AUTODETERMINACION DE SUS COORDENADAS DE POSICION Y DE SU ANGULO DE ORIENTACION.
(01/11/1985). Solicitante/s: INVENTIO AG.
INSTALACION PARA OBJETOS MOVILES LIGADOS A UNA SUPERFICIE HORIZONTAL PARA LA AUTODETERMINACION DE SUS COORDENADAS EN POSICION Y DE SU ANGULO DE ORIENTACION. COMPRENDE UN SENSOR DE RAYOS DISPUESTO EN POSICION ANGULAR DE UN RAYO GIRATORIO Y ACCIONABLE POR MEDIO DE EL QUE EMITE MEDIANTE UN EMISOR DE SINCRONIZACION UNA SEÑAL DE SINCRONIZACION OMNIDIRECCIONAL DONDE SOBRE CADA OBJETO MOVIL (F) SE ENCUENTRA SITUADO UN RECEPTOR DE SINCRONIZACION PARA LA CAPTACION DE LA SEÑAL OMNIDIRECCIONAL DE SINCRONIZACION CONECTADO A UN PROCESADOR QUE POSEE UN MEDIDOR DE TIEMPOS QUE MIDE LOS TIEMPOS DE GIRO ENTRE EL SENSOR DE RAYOS Y EL RECEPTOR DE RAYOS (A B) PARA UN RAYO GIRATORIO Y OSTENTA UN ACUMULADOR QUE CONTIENE LA CORRESPONDIENTE VELOCIDAD ANGULAR (WO).
MOVIL DIRIGIDO POR DIFERENCIA DE LUMINOSIDAD EN LA SUPERFICIE DE APOYO.
(16/12/1980) 1.Móvil dirigido por diferencia de luminosidad en la superficie de apoyo, caracterizado porque comprende un circuito fotoeléctrico que tiene en su entrada una fotorresistencia (ldr) colocada dentro de un tubo negro para evitar reflejos, cuyo tubo está situado dentro de una pantalla caja de material reflectante, donde queda instalada también una bombilla, mientras que a la salida del circuito lleva un relé de dos contactos, que estando en reposo mantiene dos contactos cerrados y dos abiertos y que en excitación abre unos y cierra los otros, estando conectados los contactos de manera que a cada una de estas posiciones corresponde un giro de la dirección en un sentido, para lo cual dichos contactos cierran el circuito del correspondiente motor de dirección para que gire…
UN PILOTO AUTOMATICO DINAMICO PARA UN BUQUE.
(16/07/1978). Solicitante/s: SPERRY RAND CORPORATION.
Resumen no disponible.
DISPOSITIVO DE POSICIONAMIENTO DINAMICO AUTOMATICO Y DE PILOTAJE DE UN VEHICULO MARINO O SUBMARINO.
(01/10/1975). Solicitante/s: ESTADO FRANCES.
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}
{kind=link}