Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino.
(29/07/2020) Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o varios sensores de luz (6 a 8), caracterizado por que están previstos un elemento de preamplificación , un elemento detector sensible a la fase y un elemento de control central , por que se comprueba una señal suministrada por el sensor de luz (6 a 8) en cuanto a un patrón de señal prefijado por el elemento de control central y por que se relaciona esta señal, a efectos de realizar un control del aparato , con la orientación del respectivo sensor de luz (6 a 8), en caso de que estén dispuestos varios sensores de luz (6 a 8), o con la orientación…
Procedimiento para operar un electrodoméstico de cocina accionado electromotrizmente.
(29/04/2020) Procedimiento para la operación de un robot de cocina accionado electromotrizmente para preparar un bien de preparación mediante una recta, preparándose el bien de preparación en un recipiente del robot de cocina mediante uno o varios pasos de preparación consecutivos, en particular, mezclar y/o calentar y/o triturar, determinándose un parámetro de estado actual del bien de preparación y/o un parámetro de operación actual del robot de cocina, caracterizado por que el robot de cocina transmite una información acerca de la receta utilizada actualmente para la preparación a un almacén de datos central de una red de comunicaciones de datos, comparándose…
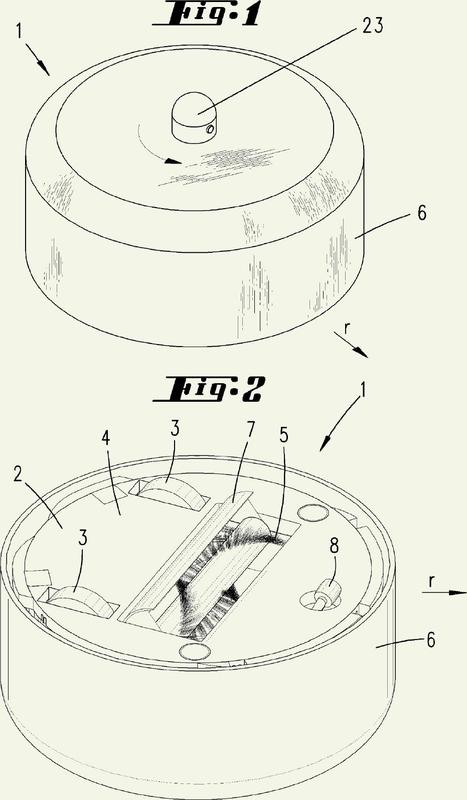
Aparato de desplazamiento automático así como procedimiento para la orientación de un aparato de este tipo.
Sección de la CIP Física
(08/05/2019). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: G05D1/02.
Procedimiento para la orientación de un aparato de desplazamiento automático , en particular de un aparato de limpieza para la limpieza de un suelo como un robot para aspirar y/o barrer, llevando a cabo el aparato al menos automáticamente un mapeo de un área completa (G) por ejemplo mediante una medición de distancias en todas las direcciones, llevando a cabo el aparato al mismo tiempo durante el mapeo del área completa o después una subdivisión automática del área completa (G) en subáreas (T1 a T8), llevándose a cabo la subdivisión en subáreas con respecto a diferentes recubrimientos de suelo (B1 a B5), caracterizado por que se juntan y almacenan las áreas contiguas con la misma rugosidad y/u orientación del pelo en una subárea.
PDF original: ES-2729749_T3.pdf
Procedimiento para la localización y el modelado simultáneos de mapas.
(27/03/2019) Procedimiento para la localización y el modelado simultáneos de mapas para la auto-localización de un aparato de desplazamiento automático, especialmente de un aparato de recogida de polvo del suelo que se desplaza automáticamente, con ruedas de desplazamiento accionadas preferiblemente por medio de un motor eléctrico, estando el aparato provisto de un dispositivo de detección de obstáculos (H) compuesto por unidades ópticas de emisión y de recepción, calculándose además una pluralidad de posibles posiciones , es decir, de posiciones y orientaciones, partiendo de una primera posición supuesta previamente calculada del aparato y considerándose,…
Aparato de cocina eléctrico.
(21/06/2017) Aparato de cocina eléctrico para la preparación de comidas, con una unidad de mando para la entrada de instrucciones de control para el control del aparato de cocina eléctrico a través de un usuario, en el que la unidad de mando se puede colocar desprendible en el aparato de cocina eléctrico y en el que se puede accionar en un primer modo operativo y en un segundo modo operativo, en el que la unidad de mando está instalada para la entrada de instrucciones de control para el control del aparato de cocina eléctrico a través del usuario en el primer modo operativo en el aparato de cocina eléctrico y está desmontada en el segundo modo operativo fuera del aparato de…
Aparato de cocina eléctrico y procedimiento de funcionamiento de un aparato de cocina eléctrico.
Sección de la CIP Necesidades corrientes de la vida
(23/11/2016). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47J43/07.
Aparato de cocina eléctrico para procesar alimentos por medio de al menos una función de procesamiento ajustable por un usuario, cuyo aparato comprende un dispositivo de ajuste para que el usuario ajuste al menos un parámetro de la función de procesamiento, estando configurado el dispositivo de ajuste como un botón giratorio, caracterizado por que está previsto un modo de funcionamiento de esta clase en el que, al girar el botón giratorio, se capta la aceleración del giro del botón giratorio y, en base a la aceleración captada, se ajusta automáticamente el parámetro de la función de procesamiento.
PDF original: ES-2641237_T3.pdf
Robot de cocina eléctrico.
Sección de la CIP Necesidades corrientes de la vida
(11/05/2016). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47J43/07.
Robot de cocina eléctrico para procesar alimentos por medio de al menos una función de procesamiento que puede ajustar un usuario,
con un dispositivo de ajuste para el ajuste por parte del usuario de al menos un parámetro de la función de procesamiento,
estando configurado el dispositivo de ajuste como botón giratorio, caracterizado
por que está previsto un modo de funcionamiento en el que, por medio de un giro del botón giratorio en un sentido, se modifica el parámetro por una primera magnitud por ángulo de giro y, por medio de un giro del botón giratorio en el sentido contrario, se modifica el parámetro por una segunda magnitud por ángulo de giro, siendo la primera magnitud diferente de la segunda magnitud.
PDF original: ES-2626576_T3.pdf
Procedimiento de funcionamiento de un robot de limpieza.
Sección de la CIP Física
(23/12/2015). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: G05D1/00.
Procedimiento de funcionamiento de un robot de limpieza , preferiblemente un robot barredor y/o aspirador, en el que el robot está preparado para captar locales en forma de un mapa, con miras a trasladar el robot sobre el suelo de uno o varios recintos (10 a 15), y en el que el robot dispone también de medios sensores para determinar la posición dentro de un recinto (10 a 15) así captado, caracterizado por que el robot puede hacerse funcionar discrecionalmente para el procesamiento de una superficie en virtud de una captación automática de un local (10 a 15) y también para el procesamiento de una superficie que ha sido ingresada previamente por un recorrido de autoinstrucción de los límites de dicha superficie, pudiendo realizarse en ambos casos, durante un procesamiento de una superficie, una comprobación del trayecto prefijado con ayuda de los límites del recinto actualmente captados.
PDF original: ES-2558331_T3.pdf
Procedimiento para la determinación de la posición de un aparato desplazable automáticamente.
(01/04/2015) Procedimiento para la determinación de la posición de un aparato desplazable automáticamente, en particular aparato acumulador de polvo del suelo desplazable automáticamente, con ruedas de desplazamiento accionadas con preferencia con motor eléctrico, en el que el aparato está provisto con una unidad de reconocimiento de obstáculos (A), que está constituida por unidades ópticas de emisión y de recepción, en el que, además, se calculan una pluralidad de posiciones y de alineaciones posibles a partir de una primera supuesta posición del aparato , previamente calculada, una posición y/o una alineación posibles del aparato se designan en este caso también como partículas, y después de un desplazamiento correspondiente del…
Máquina de cocina con un vaso de batido.
(14/11/2012) Máquina de cocina con un vaso de batido y un dispositivo de pesaje, así como con una carcasa con unalojamiento del vaso de batido, y también con un motor eléctrico para un mecanismo batidor dispuesto en elvaso de batido , en donde el fondo del vaso de batido es eventualmente calentable, en donde una zonade recepción de la máquina de cocina sirve también para recibir una cantidad a pesar y en donde la zona derecepción presenta una superficie receptora de pesaje separada que está al descubierto o puede sertransferida a un estado libre para su utilización y que está formada en una parte de pesaje , caracterizadaporque la superficie…
{kind=link}