CIP-2021 : G05D 1/02 : Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/02[1] › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/02 · Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP2021: Invenciones publicadas en esta sección.
Método y sistema para geometría de sensores.
(19/11/2013) Método para la recogida de datos en operaciones marítimas a partir de una geometría de sensores dinámicamediante el control de formación de los miembros de la formación en forma de vehículos portadores de sensores(11, 12a-d), pudiendo dichos vehículos portadores de sensores (11, 12a-d) funcionar en la superficie marítima ysiendo vehículos pilotados o no pilotados (11, 12a-d), estando dichos vehículos portadores de sensores (11, 12a-d)provistos de uno o más medios sensores, dispuestos en los vehículos portadores de sensores (11, 12a-d) y/odispuestos para los vehículos portadores de sensores (11, 12a-d), como por ejemplo remolcados por los vehículos(11, 12a-d), comprendiendo dicho método los siguientes pasos:
a) obtener los parámetros de definición de la formación pretendidos, establecidos por un centro…
Sistema de transporte colectivo automatizado.
(15/11/2013) Sistema de transporte colectivo automatizado que comprende por lo menos un vehículo sin conductor y unordenador central , pudiendo dicho vehículo ir automáticamente desde un punto de salida hasta un punto dellegada por medio de señales de mando transmitidas por dicho ordenador central y siguiendo un rail integradoen la calzada sobre la que se desplaza dicho vehículo;
estando dicho sistema caracterizado porque dicho vehículo es un vehículo automóvil montado sobre neumáticos ydicho rail es una banda de caucho o equivalente fijada en la calzada, comprendiendo dicha banda una característicaóptica continua e incorporando unos dispositivos de chip sin contacto de tipo RFID o transpondedores…
Sistema de comunicaciones para instalaciones móviles y/o fijas.
(11/11/2013) Sistema de comunicaciones para instalaciones móviles y fijas, disponiendo las instalaciones móviles y fijas de almenos una unidad de transmisión y recepción que comprende un determinado rango de transmisión y recepción,caracterizado porque la al menos parcial superposición de los rangos de transmisión y recepción de lasinstalaciones móviles y/o fijas producen una comunicación casual entre las mismas y convirtiendoesta comunicación casual en una comunicación selectiva .
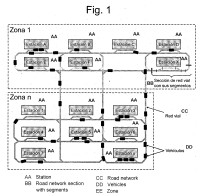
SISTEMA Y MÉTODO DE CONTROL PARA FLOTILLA DE VEHÍCULOS AUTOMATIZADOS.
(17/10/2013). Ver ilustración. Solicitante/s: MODUTRAM MEXICO, S.A. DE C.V. Inventor/es: KYLLMANN,Alexander Leopold.
Un sistema y método de control de una flotilla de vehículos automatizados qué se desplazan a lo largo de una red vial, que comprende unos dispositivos de control estacionarios y móviles, de los cuales algunos son totalmente independientes de los mecanismos y tecnologías implementadas en los vehículos y unos medios para establecer comunicación entre los dispositivos de control usando en algunos medios protocolos de comunicación abiertos y en otros protocolos cerrados, para el control de las diferentes variables involucradas en la operación segura y eficiente en el transporte de personas, carga o ambos.
(19/09/2013) Un robot de amplia cobertura que comprende:
un chasis ;
múltiples conjuntos de rueda motriz (110a-b) dispuestos sobre el chasis ,
comprendiendo cada conjunto de rueda motriz:
una carcasa del conjunto de rueda motriz (324a-b);
una rueda (326a-b) acoplada giratoriamente a la carcasa (324a-b); y
un motor de accionamiento de rueda (328a-b) situado en la carcasa del conjunto de rueda motriz (324a-b) y quefunciona para accionar la rueda (326a-b); y
un conjunto de limpieza situado en el chasis comprendiendo el conjunto de limpieza:una carcasa del conjunto de limpieza ;
un cabezal de limpieza acoplado giratoriamente a la carcasa del conjunto de limpieza ; yun motor de accionamiento de limpieza situado en la carcasa…
Estabilización dinámica y control de una máquina de movimiento de tierra.
(26/08/2013) Máquina que comprende:
una primera y segunda antena de satélite montadas en una dirección longitudinal en dicha máquina y conectadas a un receptor de satélite;
una tercera antena de satélite unida a un elemento operativo de dicha máquina y conectada a un receptor de satélite;
un sensor de referencia de gravedad montado en dicha máquina;
una pluralidad de giroscopios montados en dicha máquina; y
un procesador informático para generar señales de control basándose en datos de sensor recibidos desde dichos receptores de satélite, sensor de referencia de gravedad y dicha pluralidad de giroscopios, caracterizada porque dicho procesador informático está configurado para:
determinar un estado actual de la máquina usando dichos datos de sensor;
predecir…
Sistema integrado de vehículos para la prevención de colisiones a baja velocidad.
(21/08/2013) Un procedimiento de proporcionar mediciones de distancia para el uso con un vehículocomprendiendo el procedimiento:
la detección visual del área adyacente al vehículo para producir datos de detección visual , en el que dichadetección visual produce una imagen de cámara;
la detección de distancia de los objetos alrededor del vehículo para producir datos de detección de distancia ;
la segmentación de los datos de detección visual umbralizando la intensidad y el tono de los datos dedetección visual para producir datos de detección visual segmentados ; y
la combinación de los datos de detección visual segmentados y los datos de detección de distancia paraproducir una…
Sistema de guía de robot de limpieza que incluye un robot de limpieza y una estación de acoplamiento, y procedimiento para controlar el robot de limpieza.
(07/08/2013) Un sistema de robot limpiador que comprende:
una estación de acoplamiento adaptada para formar una zona de acoplamiento (P) dentro de un intervalo de ángulos predeterminado de un lado frontal de la misma, adaptada para formar zonas de guía de acoplamiento (L; R) que no se superponen entre sí en los lados izquierdo y derecho de la zona de acoplamiento, y adaptada para transmitir una señal de guía de acoplamiento de tal manera que las zonas de guía de acoplamiento se distinguen como una primera zona de guía de acoplamiento (W1; W2) y una segunda zona de guía de acoplamiento (L; R), en donde la primera zona de guía de acoplamiento es una zona de guía de acoplamiento de larga distancia…
(17/07/2013) Un robot de amplia cobertura que comprende:
un chasis unitario que define una pluralidad de receptáculos que reciben módulos teniendo cada uno un enchufe eléctrico del lado del receptáculo que funciona sin herramientas;un controlador configurado para proporcionar un control eléctrico independiente a cada enchufe eléctrico del lado del receptáculo que funciona sin herramientas; y
una cubierta inferior para la retención de la batería recibida dentro de un receptáculo ;
al menos uno de los receptáculos recibe un módulo de la rueda motriz (110a-b) fácilmenteextraíble del chasis como una unidad completa cuando ya no está asegurada por la cubierta inferior ,comprendiendo el módulo de la rueda motriz (110a-b):
una carcasa del módulo de rueda motriz (324a-b);
una rueda (326a-b)…
Unidad de riego robótica.
(09/07/2013) Un método para regar plantas, comprendiendo el método:
responder a la recepción de un mapa de un área , que determina de si el área necesita agua utilizandoun sistema de procesamiento ;
responder a la determinación de que el área necesita agua identificando las limitaciones actuales;
determinar si las limitaciones actuales identificadas permiten el riego en el área utilizando el sistema deprocesamiento ;
responder a la determinación de que las limitaciones actuales permiten el riego en el área generando un plande aplicación de solución de riego utilizando el sistema de procesamiento; y
ejecutar el plan de aplicación de solución…
Procedimiento para compensar las alteraciones de una brújula magnética en una embarcación.
(18/06/2013) Procedimiento para compensar las alteraciones de un sensor de rumbo magnético de una embarcación, quecomprende:
reducir el efecto de la interferencia del campo electromagnético del equipo eléctrico de la embarcación sobre laprecisión de una señal de rumbo procedente del sensor magnético, cambiando un uso de la señal de rumbobasándose en por lo menos un modo de función de la embarcación y una posición de un aparato de control delmovimiento de un barco mediante por lo menos uno de entre: compensar la interferencia del campo y adquirir laseñal de rumbo únicamente cuando la interferencia electromagnética es suficientemente baja para evitar unaimprecisión sustantiva de los datos de rumbo.
Control de un barco propulsado por chorro de agua.
(18/06/2013) Procedimiento para controlar una embarcación que presenta un dispositivo de propulsión trasero y un propulsor,que comprende:
iniciar un movimiento lateral de la embarcación acoplando el dispositivo de propulsión trasero, al tiempo que seretrasa el acoplamiento del propulsor;
acoplar el propulsor tras un primer retardo de tiempo predeterminado para ayudar al movimiento lateral de laembarcación después de que una popa de la embarcación haya adquirido una cantidad de movimiento lateral apartir del dispositivo de propulsión trasero, basándose el primer retardo de tiempo predeterminado en lascaracterísticas de funcionamiento de la embarcación para minimizar la guiñada de la embarcación durante elmovimiento lateral.
Control de un barco propulsado por chorro de agua.
(18/06/2013) Procedimiento para calcular el rumbo de una embarcación, que comprende:
adquirir un rumbo 5 de la embarcación en un instante de base;
adquirir una velocidad de viraje de rumbo a partir de una velocidad angular de un sensor de viraje de laembarcación en un instante posterior;
determinar si el rumbo adquirido es considerado preciso en el instante posterior;
si el rumbo adquirido es considerado impreciso, calcular un rumbo de la embarcación basado en la velocidad deviraje de rumbo y el rumbo originalmente adquirido;
transmitir el rumbo calculado para el control del rumbo de la embarcación.
Control de un barco propulsado por chorro de agua.
(12/06/2013) Procedimiento para controlar una embarcación que presenta un dispositivo de propulsión trasero y un propulsor,que comprende:
durante por lo menos uno de entre el inicio y el cese del movimiento lateral de la embarcación mediante elacoplamiento/desacoplamiento del propulsor, posicionar previamente un ángulo del dispositivo de propulsióntrasero para proporcionar una fuerza lateral que minimice la guiñada del barco antes de que se produzca un errorde rumbo, el ángulo posicionado previamente basado en las características de funcionamiento de laembarcación.
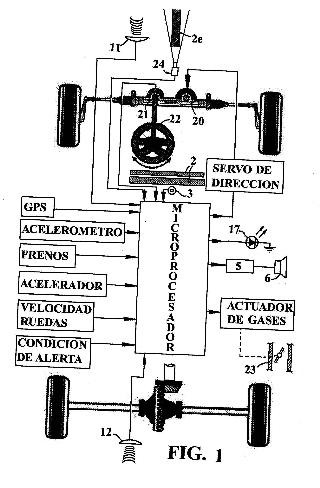
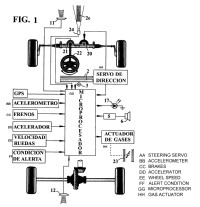
SISTEMA DE CONDUCCIÓN AUTOMÁTICA Y DE AVISOS DE ZONAS DE VELOCIDAD REDUCIDA PARA VEHICULOS MEJORADO.
(03/05/2013). Ver ilustración. Solicitante/s: MUÑOZ SAIZ,MANUEL. Inventor/es: MUÑOZ SAIZ,MANUEL.
El sistema de conducción automática y de aviso de zonas de velocidad reducida para vehículos del tipo que usan en el vehículo sistemas captadores inteligentes de aviso y conducción automática, consiste en un sistema que coloca en la zona inferior del vehículo un sistema detector y captador de señales utilizando unos elementos, franjas o bandas de señalización reflectantes codificadas y dispuestas sobre el pavimento de la calzada o soterradas en el mismo, un microprocesador proporciona las señales de aviso. Unas señales de desplazamiento lateral respecto a líneas, bandas o franjas longitudinales, son captadas por una cámara de vídeo o un radar láser en la zona superior delantera del vehículo o en la zona inferior del mismo, generando el microprocesador señales de aviso y de control, las cuales se aplican a un actuador que acciona la válvula de flujo de combustible, que controla los gases o potencia del motor.
Método de asistencia para el cambio de carril para controlar un sistema de ayuda a la conducción para la asistencia para el cambio de carril.
(02/04/2013) Método de asistencia para el cambio de carril para el control de un sistema de asistencia para el cambio de carrilde vehículos, comprendiendo el vehículo un volante, un indicador de dirección, medios ópticos o acústicos,comprendiendo el sistema de asistencia
- un módulo de detección de carril (LDM), que comprende un sistema capaz de procesar las imágenes de lacarretera;
- un módulo de detección lateral (LVD), que comprende un sistema de radar capaz de detectar objetos en loscarriles laterales y de medir sus posiciones y velocidad;
- un módulo de datos de vehículo (SVV), capaz de detectar los datos en parámetros de circulación;
- un módulo de control de reacción háptica (HFC), capaz de recibir señales a partir de dichos módulos…
Robot autónomo de limpieza de superficies para una limpieza en seco y en mojado.
(02/04/2013) Un robot de tratamiento de superficies , que comprende:
un armazón de robot que tiene un perímetro externo formado sustancialmente como una forma de ancho constante,accionado hacia delante mediante al menos un miembro rotatorio;
un compartimento de fluido dispensado (S) que alberga un fluido para ser dispensado por el robot ;un cabezal de limpieza en mojado que emplea al menos un miembro de limpieza en mojado accionado paralimpiar un ancho de limpieza a lo largo de una linea de ancho de limpieza del robot con la ayuda de fluidodispensado; y
un compartimento de material residual (D) que alberga fluido residual recogido por el robot;
teniendo el cabezal de limpieza en mojado un ancho de limpieza con respecto a la masa total del robot delarmazon de robot , compartimento de material dispensado (S) una vez…
SISTEMA DE CONDUCCIÓN AUTOMÁTICA Y DE AVISO DE ZONAS DE VELOCIDAD REDUCIDA PARA VEHICULOS.
(14/03/2013). Ver ilustración. Solicitante/s: MUÑOZ SAIZ,MANUEL. Inventor/es: MUÑOZ SAIZ,MANUEL.
Sistema de conducción automática y de aviso de zonas de velocidad reducida para vehículos que consiste en colocar en la zona inferior del vehículo un sistema detector y captador de señales utilizando unos elementos, franjas o bandas de señalización reflectantes codificadas y dispuestas sobre el pavimento de la calzada o soterradas en el mismo. Las señales captadas cuando son transversales o inclinadas se aplican a un microprocesador, o directamente a un avisador luminoso o sonoro. El microprocesador decodifica y compara las señales obtenidas con la velocidad del vehículo, calculando y proporcionando señales de aviso acústicas y visuales. Adicionalmente el sistema puede proporcionar unas señales de desplazamiento lateral respecto a líneas, bandas o franjas longitudinales centrales, zona lateral, captadas por los sensores en la zona inferior del vehículo, y/o coloca una cámara de vídeo o un radar láser en la zona superior delantera del vehículo, para guiado automático del vehículo.
Sistema de compensación de GPS / INS de un vehículo terrestre.
(13/03/2013) Sistema de navegación de un vehículo terrestre con:
un receptor del sistema de determinación de posición, que puede ser activado para generar
informaciones de posición y de dirección basadas en un sistema de determinación de posición global y alimentarlas a unsistema de compensación del sistema de referencia,
un sistema de compensación del sistema de referencia, que proporciona informaciones de posición ydirección corregidas, que está conectado con el receptor del sistema de determinación de posición y con un aparato de medida de la aceleración dispuesto para la medición de una aceleración lateral del vehículo terrestre para lamedición del ángulo de cabeceo del vehículo terrestre y con un giroscopio para la medición de un régimen deguiñada…
SISTEMA DE MEDIDA Y ACTUACION FRENTE OLEAJE MEDIANTE CORREDERA.
(20/02/2013) Sistema de medida y actuación frente oleaje mediante corredera.
Comprende un elemento sensor-corredera cuya señal medida contiene, a la vez, información sobre la velocidad de superficie y su variabilidad en una embarcación; y unos medios y subcircuitos de procesado de señal de esa variabilidad para determinar la orientación y amplitud del oleaje; (unos medios de visualización o registro de dicha información) y unos medios de actuación que incorpore esa información sobre el oleaje en el piloto automático; que ayude a la navegación y que se cierre el bucle aumentando seguridad y confort en situaciones de mala mar.
DISPOSITIVO MOVIL DE SEGURIDAD PARA AMARRADORES PORTUARIOS.
(30/01/2013) 1. Dispositivo móvil de seguridad para amarradores portuarios, caracterizado porque comprende:
- un distanciómetro láser configurado para realizar mediciones periódicas a cerca de la distancia a la que se encuentra el buque del dispositivo;
- un reloj de precisión que determina los instantes de tiempo en los que el distanciómetro láser realiza las mediciones;
- un equipo informático , conectado mediante cableado al distanciómetro láser , comprende una base de datos que almacena las mediciones periódicas realizadas con el distanciómetro láser y las defensas existentes en cada una de las instalaciones de atraque del puerto, donde dicho equipo…
SISTEMA DE COMPRA AUTOMÁTICA EN COMERCIOS.
(30/01/2013) La presente invención se encuadra dentro de las aplicaciones destinadas al sector de auto-facturación en tiendas al por menor. Está basada en un carro de la compra en el que se ha implementado Tecnologías de Identificación Automática AIT, y sistema de seguridad EAS, basada en dispositivos RFID imprimible para la identificación segura de objetos y balizas de situación. Es de especial relevancia el hecho de que el sistema funcione de manera totalmente automática, no dejando en manos del usuario la identificación de los productos adquiridos y desactivación de los sistemas de seguridad, evitando cualquier manipulación por parte del cliente en dicho proceso. Además engloba entre otros sistemas:…
SISTEMA DE COMPRA AUTOMÁTICA EN COMERCIOS.
(13/12/2012). Ver ilustración. Solicitante/s: OLIVER GARCIA, Josep. Inventor/es: OLIVER GARCIA,Josep.
La presente invención se encuadra dentro de las aplicaciones destinadas al sector de auto-facturación en tiendas al por menor. Está basada en un carro de la compra en el que se ha implementado Tecnologías de Identificación Automática AIT, y sistema de seguridad EAS, basada en dispositivos RFID imprimible para la identificación segura de objetos y balizas de situación. Es de especial relevancia el hecho de que el sistema funcione de manera totalmente automática, no dejando en manos del usuario la identificación de los productos adquiridos y desactivación de los sistemas de seguridad, evitando cualquier manipulación por parte del cliente en dicho proceso. Además engloba entre otros sistemas: identificación de usuario, pantalla táctil que permite la interacción del usuario con el sistema, bases de datos y publicidad dedicadas, interconexión entre el sistema móvil con memoria de almacenamiento de datos y el servidor central existente en las tiendas.
DISPOSITIVO MOVIL DE SEGURIDAD PARA AMARRADORES PORTUARIOS.
(19/09/2012) El dispositivo móvil de seguridad para amarradores portuarios es una invención que analiza si existe riesgo en la maniobra de atraque de un buque, mediante la medición de la velocidad del mismo, y su relación con una base de datos en la que se incluyen las características de las instalaciones portuarias y de carga del propio buque. El análisis se realiza empleando un distanciómetro láser y una aplicación informática instaladas en un soporte móvil, contando dicha aplicación informática con una base de datos de las instalaciones portuarias y de los buques que atraquen en dichas instalaciones portuarias, y evaluando su peligrosidad, manifestando los resultados mediante señales de tipo visual (luces roja y verde) y acústico.
Sistema de desplazamiento para cuerpos móviles y método de control correspondiente.
(13/06/2012) Un sistema de desplazamiento para cuerpos móviles, que comprende:
una trayectoria (L) de desplazamiento que se extiende entre un primer extremo (L1) de la trayectoria y un segundo extremo (L2) de la trayectoria;
un primer cuerpo móvil (3a) y un segundo cuerpo móvil (3b) que tienen, cada uno, medios (SM1) o (SM2) de propulsión y estando adaptados, cada uno, para moverse a lo largo de dicha trayectoria (L) de desplazamiento, estando dispuestos dicho primer cuerpo móvil (3a) y dicho segundo cuerpo móvil (3b) de tal modo que dicho primer cuerpo móvil (3a) está situado más cerca de dicho primer extremo (L1) de la trayectoria que dicho segundo cuerpo móvil (3b);
un primer medio (DET1)…
(07/06/2012) Un sistema de robot que comprende:
por lo menos un dispositivo periférico que se va a colocar en un ambiente y que comprende:
un suministro de energía ;
un componente de comunicación inalámbrica ; y
un controlador que tiene un modo activo en el que el dispositivo periférico es completamente operativo y un modo de hibernación en el que el dispositivo periférico es por lo menos parcialmente inactivo, el componente de comunicación inalámbrica es capaz de activación en el modo de hibernación ; y un robot móvil que comprende:
un sistema de impulsión que mueve el robot cerca al ambiente,
un componente de comunicación inalámbrica ; y
caracterizado porque el robot…
Procedimiento para hacer funcionar una instalación de transporte.
(30/05/2012) Procedimiento para hacer funcionar una instalación de transporte con un aparato de manipulación de estanterías(RGB), presentando dicho aparato de manipulación de estanterías (RGB) unos medios de recogida de carga pararecoger y entregar unos contenedores de mercancías (A1, A2, A3, A4), caracterizado porque una estantería está provista de por lo menos dos espacios de almacenamiento (1L, 2L, 1R, 2R) dispuestos uno detrás del otro en elsentido de almacenamiento o extracción y porque el almacenamiento, el traslado y la extracción de los contenedoresde mercancías (A1, A2, A3, A4) son tratados como procesos parciales independientes entre…
SISTEMA DE SEGURIDAD DINÁMICA POR INCLINACIÓN.
(16/04/2012) Sistema de Seguridad Dinámica por inclinación.
Dispositivo de control dinámico de inclinación de un vehículo forestal situado sobre un terreno, que comprende:
- un inclinómetro para proporcionar datos relativos a la inclinación del vehículo;
- un dispositivo GPS , para proporcionar datos de posicionamiento del vehículo en dicho terreno;
estando dicho inclinómetro y dicho GPS embarcados en el vehículo, y conectados a una unidad de procesado también embarcada, y configurada para, cada cierto tiempo:
- tomar del inclinómetro datos relativos a la inclinación del vehículo;
- comparar dichos datos de inclinación del vehículo con unos límites de inclinación preestablecidos;
- generar una señal de…
Movilidad de robot de cubrimiento.
(09/04/2012) Un robot autónomo comprende:
un chasis ; un sistema de tracción montado sobre el chasis y configurado para maniobrar el robot
un sensor de proximidad de piso ubicado en el chasis y configurado para detectar una superficie de piso adyacente, el sensor comprende:
un emisor de rayo configurado para dirigir un rayo hacia la superficie del piso; y un receptor de rayo sensible a una reflexión del rayo dirigido desde la superficie del piso y montado en un receptáculo dirigido hacia abajo del chasis ; y una cubierta transparente a los rayos que tiene un borde delantero y un borde posterior dispuesto a través de un extremo inferior del receptáculo…
Procedimiento de guiado de un vehículo.
(28/03/2012) Procedimiento de guiado de un vehículo que comprende las etapas siguientes:
- excitar, durante el desplazamiento del vehículo , por lo menos un elemento de guiado en material magnético de alta permeabilidad aplicado sobre un soporte, tal como una carretera , mediante medios de excitación ,
- detectar la señal procedente del elemento de guiado a consecuencia de la excitación mediante medios de 10 detección ,
- recoger y tratar la señal procedente de los medios de detección con el fin de guiar el vehículo , caracterizado porque la excitación del elemento de guiado se realiza de manera que sature o modifique el punto de funcionamiento del elemento de guiado en su ciclo…
SISTEMA DE SEGURIDAD DINÁMICA POR INCLINACIÓN.
(22/03/2012) Dispositivo de control dinámico de inclinación de un vehículo forestal situado sobre un terreno, que comprende: un inclinómetro para proporcionar datos relativos a la inclinación del vehículo; un dispositivo GPS , para proporcionar datos de posicionamiento del vehículo en dicho terreno; estando dicho inclinómetro y dicho GPS embarcados en el vehículo, y conectados a una unidad de procesado también embarcada, y configurada para, cada cierto tiempo: tomar del inclinómetro datos relativos a la inclinación del vehículo; comparar dichos datos de inclinación del vehículo con unos límites de inclinación preestablecidos;generar una señal de alarma si dichos datos son superiores a los límites de inclinación preestablecidos; tomar de dicho GPS datos…
METODO Y APARATO DE CONTROL DE POSICION ANGULAR RELATIVA MEDIANTE GIROMETRO DE ESTRUCTURA VIBRANTE, CON CORRECCION DE POSICION ABSOLUTA MEDIANTE BALIZA DE CONTROL, PARA SISTEMAS DE MANTENIMIENTO, ENTRETENIMIENTO Y SIMULACION DE PLATAFORMAS LANZAMISILES DE CORTO ALCANCE.
(05/11/2009) Método y Aparato de Control de Posición Angular para un sistema con dos ejes de giro para ser utilizado con un sistema microprocesado computerizado, para la detección continua de la posición angular de un sistema con dos ejes de giro mediante girómetros de estructura vibrante, con corrección automática de las desviaciones en la medida mediante comparación con datos obtenidos a partir de la posición de una baliza de referencia externa fija.
Más particularmente el invento se refiere al control de posición angular para sistemas de mantenimiento, entrenamiento y simulación de plataformas de lanzamiento de misiles de corto alcance, y equipos equivalentes,…
{kind=link}
{kind=link}
{kind=link}
{kind=link}