7 inventos, patentes y modelos de SCHLISCHKA, PATRICK
Aparato de desplazamiento automático así como procedimiento para la orientación de un aparato de este tipo.
Sección de la CIP Física
(08/05/2019). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: G05D1/02.
Procedimiento para la orientación de un aparato de desplazamiento automático , en particular de un aparato de limpieza para la limpieza de un suelo como un robot para aspirar y/o barrer, llevando a cabo el aparato al menos automáticamente un mapeo de un área completa (G) por ejemplo mediante una medición de distancias en todas las direcciones, llevando a cabo el aparato al mismo tiempo durante el mapeo del área completa o después una subdivisión automática del área completa (G) en subáreas (T1 a T8), llevándose a cabo la subdivisión en subáreas con respecto a diferentes recubrimientos de suelo (B1 a B5), caracterizado por que se juntan y almacenan las áreas contiguas con la misma rugosidad y/u orientación del pelo en una subárea.
PDF original: ES-2729749_T3.pdf
Procedimiento para hacer funcionar un aparato electrodoméstico autodesplazable y procedimiento para hacer funcionar una estación base.
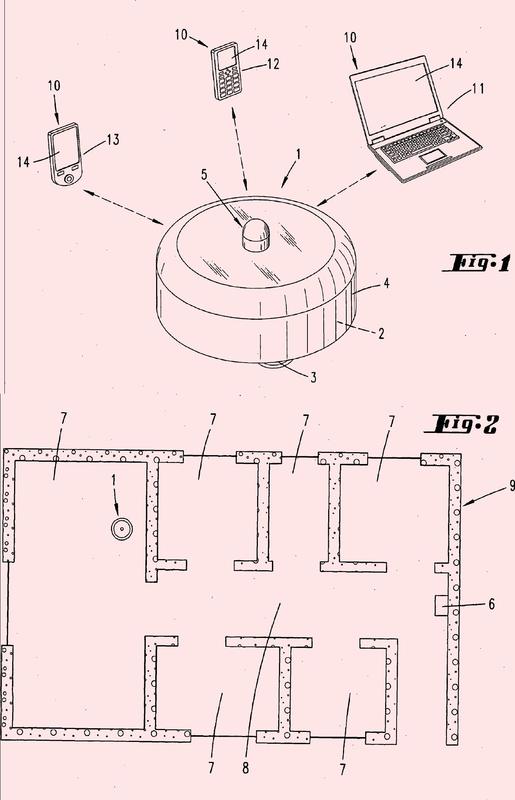
(09/05/2018) Procedimiento para hacer funcionar un aparato electrodoméstico autodesplazable como un aparato para la recogida del polvo del suelo en una habitación (A - D) o en una pluralidad de habitaciones (A - G), disponiéndose, en su caso adicionalmente a una estación de base , elementos de estación que emiten señales que permiten sacar conclusiones acerca de la respectiva ubicación del elemento de estación , orientándose el electrodoméstico mediante el procesamiento de estas señales en la habitación (A - G), caracterizado por que el elemento de estación o la estación base se activa para la emisión de una señal, produciéndose la activación mediante una activación directa del elemento de estación por medio de un mando a distancia, una activación indirecta por medio de la estación base dispuesta en su caso adicionalmente o indirecta…
Colector del polvo del suelo desplazable automáticamente.
(13/09/2017) Colector del polvo del suelo desplazable automáticamente con un accionamiento electromotor, un depósito colector del polvo y una campana de cubierta , en el que el colector presenta una o varias ruedas de desplazamiento accionadas y una rueda pasiva no accionada que rueda al mismo tiempo, en el que, además, se pueden activar medidas correctoras para la recuperación de la movilidad libre del colector , en el caso de que se reconozca un impedimento del movimiento del colector por éste, caracterizado por que la rueda pasiva es supervisada con respecto a su movimiento para la introducción posible de una medida de corrección en el caso de que no se…
Aparato autodesplazable de limpieza de suelos.
Sección de la CIP Necesidades corrientes de la vida
(09/03/2016). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47L11/40.
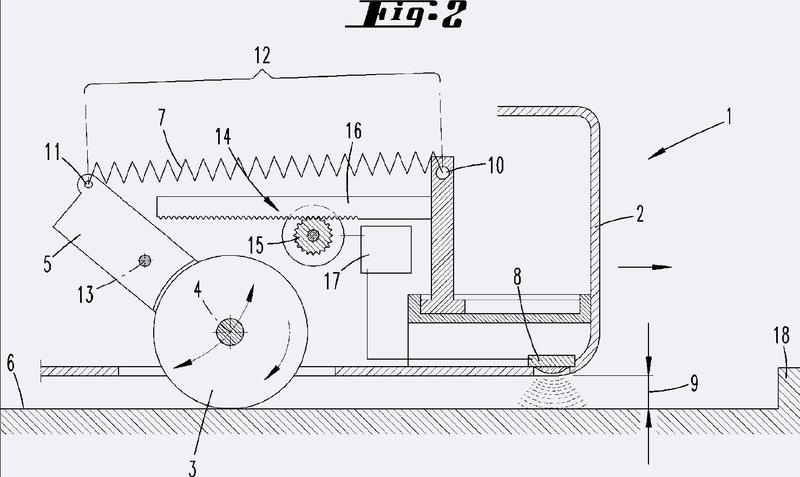
Aparato autodesplazable de limpieza de suelos que presenta un chasis y varias ruedas , pudiéndose accionar al menos una rueda y uniéndose la rueda accionable al chasis a través de una pieza de suspensión que apoya la rueda y que se mueve respecto al chasis , desplazándose la rueda además para el apoyo en un suelo por el que se puede desplazar el aparato de limpieza de suelos , estando la misma sujeta al efecto de un muelle que ejerce una fuerza elástica y pudiéndose introducir y extraer la rueda con ayuda de una pieza de suspensión respecto al chasis , caracterizado por que la fuerza elástica se puede variar independientemente de un aumento o de una disminución de la fuerza elástica provocada por una introducción y extracción, especialmente incrementar con el aumento de la extracción de la rueda.
PDF original: ES-2651913_T3.pdf
Procedimiento de funcionamiento de un robot de limpieza.
Sección de la CIP Física
(23/12/2015). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: G05D1/00.
Procedimiento de funcionamiento de un robot de limpieza , preferiblemente un robot barredor y/o aspirador, en el que el robot está preparado para captar locales en forma de un mapa, con miras a trasladar el robot sobre el suelo de uno o varios recintos (10 a 15), y en el que el robot dispone también de medios sensores para determinar la posición dentro de un recinto (10 a 15) así captado, caracterizado por que el robot puede hacerse funcionar discrecionalmente para el procesamiento de una superficie en virtud de una captación automática de un local (10 a 15) y también para el procesamiento de una superficie que ha sido ingresada previamente por un recorrido de autoinstrucción de los límites de dicha superficie, pudiendo realizarse en ambos casos, durante un procesamiento de una superficie, una comprobación del trayecto prefijado con ayuda de los límites del recinto actualmente captados.
PDF original: ES-2558331_T3.pdf
Procedimiento para el control de un robot.
Secciones de la CIP Física Necesidades corrientes de la vida
(18/12/2015). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: G05D1/00, G05D1/02, G08G1/123, A47L9/00.
Procedimiento para el control de un robot , con preferencia de un robot de barrar y/o de aspirar desplazable de forma autónoma, en el que en el robot se crea y se registra un mapa del entorno o bien de una vía de desplazamiento predeterminada, en el que, además, un aparato exterior actúa para el control sobre el robot , se transmite el mapa fuera del robot sobre el aparato exterior y se representa la posición del robot dentro del mapa , caracterizado por que el mapa del entorno se crea en el aparato exterior y el mapa creado de esta manera se transmite al robot.
PDF original: ES-2554381_T3.pdf
APARATO RECOGEDOR DE POLVO DEL SUELO AUTOMATICAMENTE TRASLABLE, ASI COMO COMBINACION DE UN APARATO RECOGEDOR DE ESTA CLASE Y UNA ESTACION BASE.
Sección de la CIP Necesidades corrientes de la vida
(16/03/2006). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47L9/00, A47L5/28.
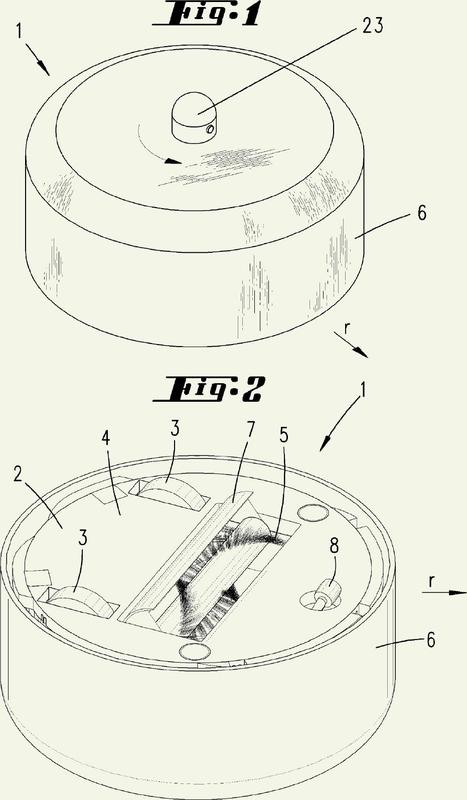
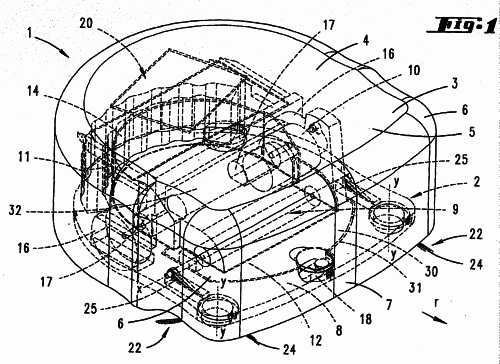
Aparato recogedor de polvo del suelo automática mente trasladable que comprende un accionamiento de motor eléctrico, un recipiente colector de polvo y una caperuza de cubierta , presentando el aparato un trazado en planta que se aparta de una forma circular, componiéndose el trazado en planta de un tramo de forma circular y un tramo de forma orientada a un rectángulo y estando delante el tramo rectangular , considerado en la dirección de traslación (r), caracterizado porque el aparato presenta dos cepillos barredores que giran orientados según un eje vertical (y), y porque los cepillos barredores están asociados a zonas de esquina delanteras del tramo rectangular del trazado en planta.
{kind=link}
{kind=link}
{kind=link}
{kind=link}