Ensamblaje de una pieza de trabajo con una soldadura de ensamblaje escondida.
Procedimiento para el ensamblaje de piezas de trabajo tapadas mediante un rayo de energía (10),
en el que
a) al menos una pieza inferior de pieza de trabajo (3) y al menos una pieza superior de pieza de trabajo (2) se posicionan una respecto a otra;
b) en el estado posicionado, la al menos una pieza superior de pieza de trabajo (2) está en contacto con la al menos una pieza inferior de pieza de trabajo (3) a lo largo de un contorno de ensamblaje (4) de la al menos una pieza inferior de pieza de trabajo (3) tapando el contorno de ensamblaje (4), cuya extensión teórica es conocida por un control con respecto a un sistema de coordenadas;
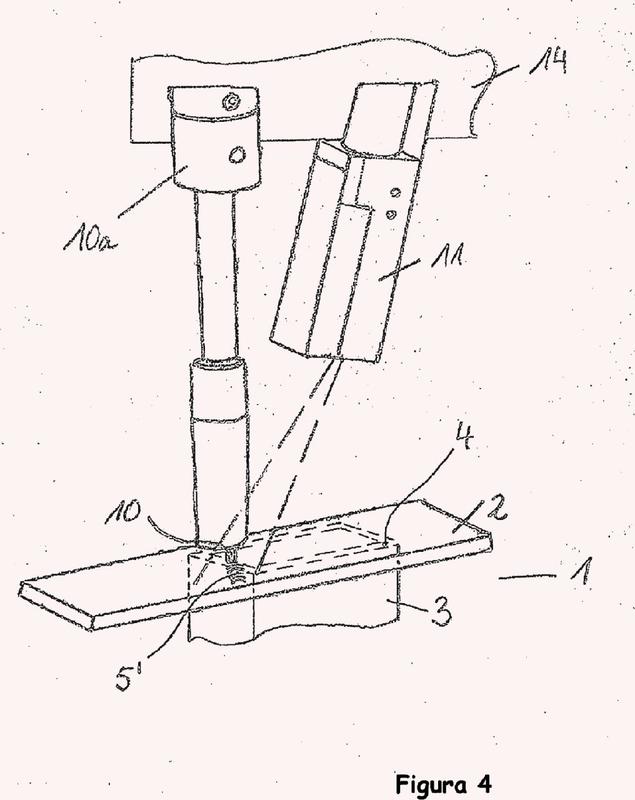
c) el rayo de energía (10) se mueve hacia un lado superior (2a), opuesto a la al menos una pieza inferior de pieza de trabajo (3), de la al menos una pieza superior de pieza de trabajo (2) y es movido por un control a lo largo del contorno de ensamblaje (4) para ensamblar la al menos una pieza superior de pieza de trabajo (2) por unión de materiales con el contorno de ensamblaje (4), caracterizado por que
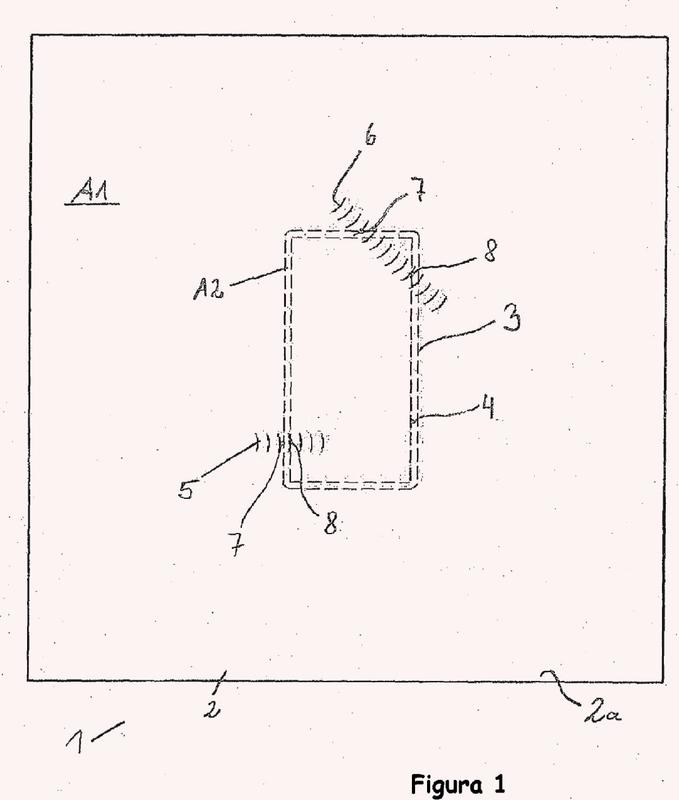
d) con el rayo de energía (10) se genera una soldadura de localización (5, 5', 6) en el lado superior (2a) de la al menos una pieza superior de pieza de trabajo (2) para la detección del contorno de ensamblaje (4);
e) mediante un detector (11) se detecta una transición (7, 8) en la que una zona de superficie (A1) de la al menos una pieza superior de pieza de trabajo (2) no tiene contacto con la al menos una pieza inferior de pieza de trabajo (3) linda con una zona de superficie (A2) de la al menos una pieza superior de pieza de trabajo (2) que tiene contacto con el contorno de ensamblaje (4);
f) el control registra una posición de la transición (7, 8) y la compara con una posición teórica de la transición (7, 8), almacenada en el control; y
g) en caso de una posición divergente de la transición (7, 8), se corrige (4) un movimiento del rayo de energía (10) a lo largo del contorno de ensamblaje.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13168793.
Solicitante: FFT Produktionssysteme GmbH & Co. KG.
Nacionalidad solicitante: Alemania.
Dirección: Schleyerstrasse 1 36041 Fulda ALEMANIA.
Inventor/es: KRAFT,MARTIN, SCHNEEGANS,DR. JOCHEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23K26/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › B23K 26/00 Trabajo por rayos láser, p. ej. soldadura, corte o taladrado. › Dispositivos que tiene un movimiento relativo entre el haz de rayos y la pieza.
- B25J9/16 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
PDF original: ES-2556564_T3.pdf
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
CONTROLADOR PARA ROBOTS, del 19 de Marzo de 2020, de ERLE ROBOTICS, S.L: En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras […]