METODO Y APARATO DE CONTROL DE POSICION ANGULAR RELATIVA MEDIANTE GIROMETRO DE ESTRUCTURA VIBRANTE, CON CORRECCION DE POSICION ABSOLUTA MEDIANTE BALIZA DE CONTROL, PARA SISTEMAS DE MANTENIMIENTO, ENTRETENIMIENTO Y SIMULACION DE PLATAFORMAS LANZAMISILES DE CORTO ALCANCE.
Método y Aparato de Control de Posición Angular para un sistema con dos ejes de giro para ser utilizado con un sistema microprocesado computerizado,
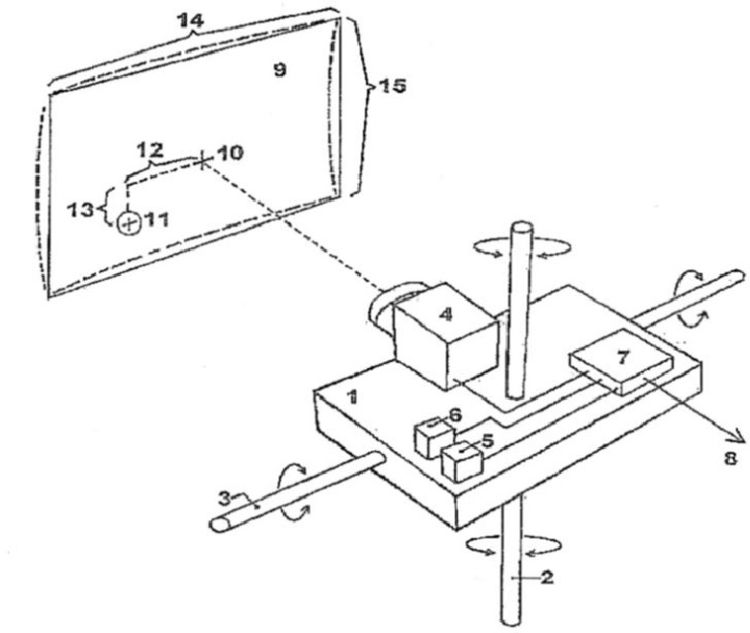
para la detección continua de la posición angular de un sistema con dos ejes de giro mediante girómetros de estructura vibrante, con corrección automática de las desviaciones en la medida mediante comparación con datos obtenidos a partir de la posición de una baliza de referencia externa fija.
Más particularmente el invento se refiere al control de posición angular para sistemas de mantenimiento, entrenamiento y simulación de plataformas de lanzamiento de misiles de corto alcance, y equipos equivalentes, siempre que sus movimientos tengan los dos grados de libertad de acimut y elevación.
El método y aparato de control, por su naturaleza de aplicación universal con sensores inerciales, permite su aplicación en plataformas múltiples con independencia del sistema sensorizado de éstas, o incluso en los casos en los que no incluyan sensores angulares.
El método y aparato de control, por su forma de corrección automática, permite la utilización en sistemas múltiples simultáneos, con una referencia común a todos ellos, de forma que se encuentren sincronizados. Estos sistemas pueden ser homogéneos o heterogéneos
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200601532.
Solicitante: ADAPTIVE SYSTEMS, S.A.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: GONZALEZ-BERENGUER HURTADO,JOSE DANIEL.
Fecha de Solicitud: 7 de Junio de 2006.
Fecha de Publicación: .
Fecha de Concesión: 22 de Octubre de 2009.
Clasificación Internacional de Patentes:
- G01C21/16A
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
- G05D1/10C
Clasificación PCT:
- F41G7/36 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › F41G 7/00 Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06). › utilizando referencias inerciales.
- F42B15/01 F […] › F42 MUNICIONES; VOLADURA. › F42B CARGAS EXPLOSIVAS, p. ej. PARA VOLADURA; FUEGOS ARTIFICIALES; MUNICIONES (composiciones explosivas C06B; espoletas para municiones F42C; voladura F42D). › F42B 15/00 Proyectiles autopropulsados, p. ej. cohetes; Misiles (F42B 10/00, F42B 12/00, F42B 14/00 tienen prioridad; para entrenamiento o instrucción F42B 8/12; torpedos-cohete F42B 17/00; torpedos marinos F42B 19/00; vehículos espaciales B64G; conjuntos funcionales de propulsión por reacción F02K). › Disposiciones para el guiado o el pilotaje instaladas en los proyectiles autopropulsados o en los misiles (control de vuelo para aviones B64C; sistemas de guiado distintos de los instalados únicamente a bordo F41G 7/00, F41G 9/00; localización de objetivos por medio de proyectiles, p. ej. cohetes, G01S; control de vuelo en general G05D 1/00; aspectos de cálculo G06).
- G01C21/16 G […] › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
- G05D1/02 G05D 1/00 […] › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
- G05D1/08 G05D 1/00 […] › Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]