Estabilización dinámica y control de una máquina de movimiento de tierra.
Máquina que comprende:
una primera (104) y segunda (106) antena de satélite montadas en una dirección longitudinal en dicha máquina y conectadas a un receptor (204,
206) de satélite;
una tercera antena (108) de satélite unida a un elemento (112) operativo de dicha máquina y conectada a un receptor (208) de satélite;
un sensor (210) de referencia de gravedad montado en dicha máquina;
una pluralidad de giroscopios (214) montados en dicha máquina; y
un procesador (222) informático para generar señales de control basándose en datos de sensor recibidos desde dichos receptores de satélite, sensor de referencia de gravedad y dicha pluralidad de giroscopios, caracterizada porque dicho procesador informático está configurado para:
determinar un estado actual de la máquina usando dichos datos de sensor;
predecir un estado futuro de la máquina usando dicho estado actual e información de posición de un periodo anterior; calcular un estado de error reducido utilizando dicho estado actual determinado y dicho estado futuro predicho;
calcular un estado con compensación de retardo de la máquina que incluye una estimación de posición de máquina en un tiempo de cálculo de señal de control;
calcular señales de control para dicho elemento operativo usando dicho estado con compensación de retardo; y aplicar dichas señales de control a dicho elemento operativo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05016225.
Solicitante: TOPCON POSITIONING SYSTEMS, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 7400 NATIONAL DRIVE LIVERMORE CA 94551 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MATROSOV,IVAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E02F3/84 CONSTRUCCIONES FIJAS. › E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS. › E02F DRAGADO; MOVIMIENTO DE TIERRAS (extracción de turba E21C 49/00). › E02F 3/00 Dragas; Ingenios para el movimiento de tierras (para usos particulares E02F 5/00; otras máquinas o aparatos para la explotación minera E21C; construcción de túneles E21D). › Accionamiento o dispositivos de control correspondientes.
- E02F9/20 E02F […] › E02F 9/00 Elementos constitutivos de las dragas o de los ingenios para el movimiento de tierras, no limitados a una de las categorías cubiertas por los grupos E02F 3/00 - E02F 7/00 (dispositivos de colocación o de recogida de cables eléctricos de arrastre B66C). › Mandos; Dispositivos de control (transmisión en general F16H; control en general G05; mandos para motores eléctricos múltiples H02K, H02P).
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2420655_T3.pdf
Fragmento de la descripción:
Estabilización dinámica y control de una máquina de movimiento de tierra.
Antecedentes de la invención La presente invención se refiere en general al control de máquinas, y más particularmente a la estabilización dinámica y control de una máquina.
Se han desarrollado diversos tipos de máquinas, denominadas en general en el presente documento máquinas de movimiento de tierra, que alteran la topología o geografía del terreno. Por ejemplo, un bulldozer con una pala cortante unida y móvil puede usarse en diversas aplicaciones de movimiento de tierra. Durante la preparación del sitio de construcción, puede usarse un bulldozer para nivelar (o aplicar alguna pendiente predeterminada) el suelo antes de la construcción de un edificio en el suelo. Los bulldozers también son útiles en carretera y otras aplicaciones de construcción. Naturalmente, hay diversos usos para bulldozers y otras máquinas de movimiento de tierra.
Inicialmente, la operación de los bulldozers se realizaba por operarios especializados junto con personal de mantenimiento terrestre, por ejemplo personal de corrección de pendiente equipados con instrumentos de topografía para garantizar una nivelación correcta. Este modo de operación sigue usándose ampliamente en la actualidad. Una desventaja de este modo de operación es que consume tiempo y requiere mano de obra intensa.
Se han realizado diversos intentos para automatizar la operación de las máquinas de movimiento de tierra. Por ejemplo, se han empleado herramientas de navegación (tales como sistemas láser y sistemas basados en satélite) para ayudar a automatizar diversas tareas de movimiento de tierra. Por ejemplo, la publicación de solicitud de patente estadounidense 2003/0137658 A1 publicada el 24 de julio de 2003 da a conocer el uso de un láser rotativo junto con un sistema de navegación basado en satélite para su uso en el control de un bulldozer.
La publicación de patente estadounidense 5.987.371 A publicada el 16 de noviembre de 1999 da a conocer el uso de un sistema de GPS junto con un sensor de detección de alabeo para controlar una máquina de movimiento de tierra.
La publicación de patente estadounidense 5.925.085 A publicada el 20 de julio de 1999 da a conocer una máquina de trabajo de suelo en la que la posición de la máquina se determina por GPS y un sensor láser, y también la posición de la herramienta (por ejemplo una pala de movimiento de suelo) se determina por GPS y un sensor láser, que permite un control preciso de la herramienta.
La publicación de patente europea EP 0 763 749 A1 publicada el 19 de marzo de 1997 da a conocer el uso de dos antenas de GPS separadas espacialmente combinadas con un sistema de navegación por inercia para controlar la posición de una plataforma móvil y mejorar las estimaciones de rumbo.
Una de las limitaciones de los sistemas existentes es que el uso de láseres para el control de la máquina requiere una línea visual entre el láser rotativo y la máquina de construcción. Además, para una operación apropiada, hay una distancia operativa máxima entre el transmisor de láser rotativo y la máquina de construcción. Aunque los sistemas de navegación por satélite carecen de una limitación de la distancia máxima, los sistemas de navegación por satélite disponibles actualmente introducen otras limitaciones. Por ejemplo, estos sistemas tienen generalmente una precisión limitada, especialmente cuando se calculan mediciones verticales. Otro problema con los sistemas de control de máquinas de navegación por satélite es el retardo introducido en el bucle de control.
Otro problema con los sistemas de control de máquinas existentes es la inestabilidad dinámica a velocidades operativas relativamente rápidas. Más particularmente, a velocidades de bulldozer rápidas (pero no máximas) , el bulldozer y la pala unida tienden a oscilar, dando como resultado por tanto una nivelación imprecisa.
Breve sumario de la invención La presente invención proporciona un método y un aparato de control de máquinas mejorados que garantizan la estabilidad dinámica de una máquina (por ejemplo, bulldozer) durante una operación a velocidades relativamente rápidas.
En una realización, una máquina comprende antenas de satélite primera y segunda montadas en la máquina y conectadas a receptores de satélite. Los receptores de satélite se usan para recibir señales desde un sistema de satélite de navegación global. Una tercera antena de satélite está unida a al menos un elemento operativo de la máquina. En una realización particular, el elemento operativo puede ser la pala de un bulldozer. Un sensor de referencia de gravedad y una pluralidad de giroscopios están montados en la máquina para proporcionar datos de sensor a un procesador. El procesador genera señales de control de máquina basándose en datos de sensor recibidos desde los receptores de satélite, sensor de referencia de gravedad y giroscopios.
Según una realización, el procesador determina un estado actual de la máquina usando los datos de los sensores montados en la máquina. Se predice un estado futuro de la máquina usando el estado actual e información de posición filtrada de un periodo anterior. En una realización ventajosa, la predicción se realiza usando un filtrado de Kalman. Se calcula un estado de error reducido usando el estado determinado y el estado predicho. Se calcula un estado con compensación de retardo usando el estado de error reducido. Entonces se calculan las señales de control para un elemento operativo (por ejemplo, la pala de un bulldozer) usando el estado con compensación de retardo y las señales de control se aplican al elemento operativo para controlar el elemento operativo. En una realización en la que la máquina es un bulldozer, las señales de control pueden controlar la elevación y pendiente de la pala del bulldozer.
Éstas y otras ventajas de la invención resultarán evidentes para los expertos habituales en la técnica mediante referencia a la siguiente descripción detallada y los dibujos adjuntos.
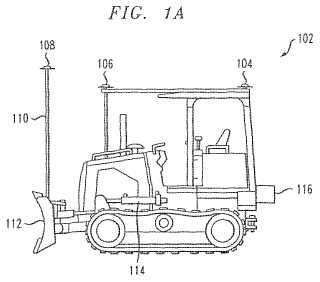
Breve descripción de los dibujos Las figuras 1A y 1B muestran una máquina de construcción según una realización de la invención;
la figura 2 es un diagrama de bloques de alto nivel de los componentes de un sistema de control para controlar un bulldozer según una realización de la invención;
la figura 3 representa parámetros de estado de máquina que se usan para describir el estado instantáneo de una máquina;
la figura 4 representa el vector de velocidad de máquina generalizado;
la figura 5 representa datos de sensor;
la figura 6 representa datos de sincronismo;
la figura 7 es un diagrama de flujo que muestra las etapas de alto nivel realizadas por el módulo de control durante un periodo de tiempo;
la figura 8 es un diagrama de flujo que muestra detalles adicionales de la etapa de predicción de la figura 7;
la figura 9 es un diagrama de flujo que muestra detalles adicionales de la etapa de filtrado de Kalman de la figura 7;
la figura 10 es un diagrama de flujo que muestra detalles adicionales de la etapa de compensación de retardo de la figura 7; y
la figura 11 es un diagrama de flujo que muestra detalles adicionales del cálculo de la etapa de señales de control de la figura 7.
Descripción detallada Las figuras 1A y 1B muestran una máquina 102 de construcción según una realización de la presente invención. La figura 1A muestra una vista lateral de la máquina 102 de construcción y la figura 1B muestra una vista angular en alzado de la máquina 102 de construcción. En la realización particular que se describe, la máquina 102 de construcción es un bulldozer. Sin embargo, tal como resultaría inmediatamente evidente para un experto en la técnica, los principios de la presente invención también pueden aplicarse a otros tipos de máquinas de construcción. La máquina 102 de construcción tiene tres antenas 104, 106, 108 de satélite que se usan para recibir señales desde sistemas de satélite de navegación globales (GNSS) . Los GNSS son bastante conocidos y se usan para resolver una amplia variedad de tareas relacionadas con el posicionamiento/tiempo. Dos sistemas bastante conocidos de este tipo son el sistema de posicionamiento global (GPS) de los Estados Unidos y el sistema de satélite de navegación global (GLONASS) de Rusia. Para facilitar la referencia, esta descripción se referirá generalmente al sistema de GPS, pero debe entenderse que la presente descripción puede aplicarse igualmente a GLONASS, GPS
+ GLONASS combinados u otros sistemas de GNSS.
Las antenas 104 y 106 de GPS está montadas en la dirección longitudinal en el techo de... [Seguir leyendo]
Reivindicaciones:
1. Máquina que comprende:
una primera (104) y segunda (106) antena de satélite montadas en una dirección longitudinal en dicha
máquina y conectadas a un receptor (204, 206) de satélite; una tercera antena (108) de satélite unida a un elemento (112) operativo de dicha máquina y conectada a un receptor (208) de satélite;
un sensor (210) de referencia de gravedad montado en dicha máquina; una pluralidad de giroscopios (214) montados en dicha máquina; y un procesador (222) informático para generar señales de control basándose en datos de sensor recibidos desde dichos receptores de satélite, sensor de referencia de gravedad y dicha pluralidad de giroscopios, caracterizada porque dicho procesador informático está configurado para:
determinar un estado actual de la máquina usando dichos datos de sensor; predecir un estado futuro de la máquina usando dicho estado actual e información de posición de un periodo anterior;
calcular un estado de error reducido utilizando dicho estado actual determinado y dicho estado futuro
predicho; calcular un estado con compensación de retardo de la máquina que incluye una estimación de posición de máquina en un tiempo de cálculo de señal de control;
calcular señales de control para dicho elemento operativo usando dicho estado con compensación de retardo; y aplicar dichas señales de control a dicho elemento operativo.
2. Máquina según la reivindicación 1, en la que el estado de la máquina comprende una o más de: la posición del chasis principal de la máquina, la orientación del chasis principal de la máquina, la posición de dicho elemento operativo, la posición de un mecanismo de control de dicho elemento operativo.
3. Método para operar una máquina que comprende las etapas de y caracterizado por: determinar un estado actual de la máquina usando datos desde sensores montados en dicha máquina; predecir un estado futuro de la máquina usando dicho estado actual e información de posición filtrada de
un momento anterior; calcular un estado de error reducido usando dicho estado determinado y dicho estado predicho; calcular un estado con compensación de retardo de la máquina, que incluye una estimación de posición
de máquina en un tiempo de cálculo de señal de control, usando dicho estado de error reducido;
calcular señales de control para al menos un elemento operativo de dicha máquina usando dicho estado con compensación de retardo; y aplicar dichas señales de control a dicho al menos un elemento operativo.
4. Método según la reivindicación 3, en el que además dicha etapa de predecir comprende además la etapa de filtrado de Kalman.
5. Método según la reivindicación 3, en el que dicha máquina es un bulldozer y dicho al menos un elemento operativo es una pala, y en el que dicha etapa de calcular señales de control comprende además la etapa de calcular señales de control para una elevación y pendiente de dicha pala.
6. Método según la reivindicación 3, en el que dicha etapa de predecir comprende además las etapas de: calcular una velocidad generalizada de la máquina;
calcular un intervalo de tiempo desde un periodo previo; interpolar la velocidad generalizada entre los periodos actuales y previos; y añadir la velocidad generalizada integrada para un intervalo de tiempo desde el periodo previo y la estimación de estado de máquina previa.
7. Método según la reivindicación 6, en el que dicha etapa de calcular un estado con compensación de retardo de la máquina comprende además la etapa de:
extrapolar dicha velocidad generalizada hacia delante para un intervalo de dicho retardo.
8. Método según la reivindicación 3, en el que dicha etapa de calcular señales de control para al menos un elemento operativo de dicha máquina comprende además las etapas de:
calcular una variedad objetivo dentro de un espacio de estado de dicha máquina usando datos de superficie de diseño;
calcular un campo vectorial que depende de la señal de control en dicho espacio de estado; y
generar una señal de control que orienta el campo vectorial dentro del espacio de estado para minimizar el tiempo que se necesita para que el estado de máquina alcance una proximidad de tolerancia de la variedad objetivo.
9. Método según la reivindicación 3, en el que el estado de máquina comprende una o más de:
la posición del chasis principal de la máquina, la orientación del chasis principal de la máquina, la posición de una pala de dicha máquina, la posición de un mecanismo de control de dicha pala.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]