Sistema integrado de vehículos para la prevención de colisiones a baja velocidad.
Un procedimiento de proporcionar mediciones de distancia para el uso con un vehículocomprendiendo el procedimiento:
la detección visual (2) del área adyacente al vehículo para producir datos de detección visual (21), en el que dichadetección visual (2) produce una imagen de cámara;
la detección de distancia de los objetos alrededor del vehículo para producir datos de detección de distancia (26);
la segmentación (12) de los datos de detección visual (21) umbralizando la intensidad y el tono de los datos dedetección visual (21) para producir datos de detección visual segmentados (22); y
la combinación de los datos de detección visual segmentados (22) y los datos de detección de distancia (26) paraproducir una estimación de los objetos alrededor del vehículo (28), en el que dicha combinación comprende el usode los datos de detección de distancia (26) para ubicar los objetos dentro de la imagen de cámara
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AU2004/001684.
Solicitante: ZORG INDUSTRIES (HONG KONG) LIMITED.
Nacionalidad solicitante: China.
Dirección: Room 1601 Kinwick Centre, 32 Hollywood Road Central Hong Kong CHINA.
Inventor/es: HAMMADOU,TARIK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60Q1/48 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60Q DISPOSICION DE DISPOSITIVOS DE SEÑALIZACION O ILUMINACION, SU MONTAJE O SOPORTE, SUS CIRCUITOS, PARA VEHICULOS EN GENERAL. › B60Q 1/00 Disposición de dispositivos de señalización óptica o de iluminación, su montaje, su soporte o los circuitos a este efecto (para la iluminación del interior del vehículo B60Q 3/00). › para aparcar.
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
- G08G1/16 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas anticolisión.
PDF original: ES-2429572_T3.pdf
Fragmento de la descripción:
Sistema integrado de vehículos para la prevención de colisiones a baja velocidad.
CAMPO DE LA INVENCIÓN:
La presente invención se refiere a un sistema y aparato de prevención de colisiones a baja velocidad. En particular, la invención incluye un sistema de medición de distancia y un visualizador de espejo retrovisor integrado y permite la respuesta a la información de colisión en tiempo real. El visualizador del espejo retrovisor
proporciona información visual de los ángulos muertos en tiempo real y la clasificación de obstáculos y mediciones de distancia.
ANTECEDENTES DE LA INVENCIÓN:
El operario de un vehículo, como un automóvil o un camión, normalmente tiene una visibilidad adecuada para la operación segura de un vehículo. La visibilidad del operario se aumenta mediante el uso bien conocido de los espejos retrovisores central y laterales. Sin embargo, cuando un conductor está maniobrando un vehículo en un aparcamiento normalmente no puede ver una porción del vehículo que puede hacer contacto.
Una preocupación actual entre los usuarios y las aseguradoras de automóviles por igual es un daño superficial potencial causado por colisiones a muy baja velocidad. La mayoría de los vehículos en la actualidad usan un panel moldeado como parte de un ensamblaje de paragolpes integrado. Tales paragolpes están diseñados para absorber fuerzas de impacto a alta velocidad, pero normalmente son demasiado rígidos para disipar la fuerza de la colisión a baja velocidad del orden de 8 kilómetros por hora. Las fuerzas de reacción resultantes reflejadas de un paragolpes podrían causar un daño superficial a los paneles del paragolpes que requiera el reemplazo del panel.
Para solucionar problemas de esta naturaleza, se han desarrollado sistemas de prevención de colisiones de vehículos y en la actualidad son relativamente comunes. Tales sistemas incluyen un aparato para medir la distancia entre un vehículo y un obstáculo en la trayectoria del vehículo y un aparato para visualizar esa 30 distancia o al menos alertar al operario de una colisión inminente. Por ejemplo, la patente estadounidense núm.
4.903.004 concedida el 20 de febrero de 1990, y titulada "All-Weather Digital Distance Measuring and Signaling System" (incorporada por referencia cruzada) describe un sistema de medición de distancia y de señalización para un vehículo diseñado específicamente para medir con exactitud las distancias con respecto a los obstáculos. Un conjunto de dispositivos transductores que tienen capacidades independientes de envío y de recepción se montan 35 en una estructura de soporte, como un paragolpes. Una señal de impulsos que emana de un circuito amplificador con transistores es cronometrada cuando es convertida a una señal de onda ultrasónica por cada dispositivo transductor, y simultáneamente emitida y recibida por los dispositivos transductores, y es retornada como una señal de impulsos. Esta señal es retornada tras rebotar desde un obstáculo, y el tiempo del retorno es convertido en un valor de distancia por la circuitería del convertidor digital. La circuitería del convertidor digital a su vez envía la señal
a un dispositivo de visualización digital.
La patente estadounidense núm. 4.674.073 concedida el 16 de junio de 1987 y titulada "Reflective Object Detecting Apparatus" describe un aparato en el que se proporciona una pluralidad de elementos de transmisión ultrasónica y elementos de recepción ultrasónica y se conmutan eléctricamente de manera secuencial
para permitir que se detecte la existencia de un obstáculo. Se visualiza la distancia al objeto y una región particular en la que es detectado. Los elementos de transmisión ultrasónica y los elementos de recepción ultrasónica se disponen alternativamente en un array lineal.
Los documentos US-2002/0057-195 y US-2003/0088361 dan a conocer procedimientos para estimar la 50 distancia entre vehículos combinando datos de imagen con láser, o datos de radar.
Desafortunadamente, los sistemas conocidos del tipo descrito anteriormente normalmente sufren una serie de problemas incluyendo la exactitud de detección, los errores de detección del suelo y la falta de clasificación de objetivos. Por ejemplo, si un objeto es un objetivo estático, un automóvil o un peatón. Asimismo, los sistemas 55 conocidos son sistemas de aviso que proporcionan un sonido de aviso audible o una indicación visual.
RESUMEN DE LA INVENCIÓN:
Es un objeto de la presente invención proporcionar un procedimiento de medición de distancia mejorado.
De acuerdo con un primer aspecto de la presente invención, se proporciona un procedimiento de proporcionar mediciones de distancia para el uso con un vehículo como se expone en la reivindicación 1. 5
BREVE DESCRIPCIÓN DE LOS DIBUJOS:
Las formas de realización preferidas de la presente invención se ilustran en los dibujos adjuntos. No se debería considerar que los dibujos limitan la invención a las formas de realización específicas, sino que se proporcionan para una mejor explicación y entendimiento. En los dibujos:
La FIG. 1 es una ilustración esquemática de las porciones de control de la forma de realización preferida;
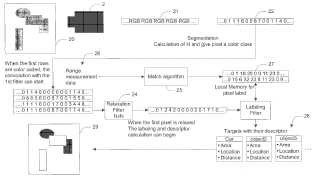
La FIG. 2 ilustra un diagrama de flujo de las etapas en la clasificación de imagen;
La FIG. 3 ilustra el proceso de la clasificación de imagen;
DESCRIPCIÓN DETALLADA DE LAS FORMAS DE REALIZACIÓN PREFERIDAS:
Las formas de realización preferidas de la invención son capaces de detectar y clasificar objetivos para una colisión inminente a baja velocidad y se basan en la información dada por un sistema de prevención de colisiones que configura el paragolpes para reducir el daño por el impacto. El sistema envía información a una Unidad de Control Electrónico de Aparcamiento (PECU) central del automóvil, que reconoce los datos de colisión y llama a subrutinas por separado o permite que los sistemas dedicados modulen el sistema de frenado y también configuren los amortiguadores del paragolpes.
Un ejemplo de disposición de la forma de realización preferida se ilustra esquemáticamente en la Fig. 1. Un número de dispositivos 2-7 se montan en el coche incluyendo un sensor de imagen CMOS 2, una serie de sensores de distancia de ultrasonidos 3-4, un controlador de la caja de cambios 5, un controlador de los amortiguadores de la barra del paragolpes 6 y un monitor de temperatura 7, donde los dispositivos 2 - 7 están interconectados con una Unidad de Control Electrónico de Aparcamiento (PECU) 8, que puede comprender un microcontrolador integrado y un software asociado. También, conectado a la PECU, hay un visualizador interactivo 10.
La PECU es responsable de utilizar información de los Sensores de Medición de Distancia y del Sensor de Imagen para proporcionar información en tiempo real para su visualización en el dispositivo de visualización 10. La PECU 8 también procesa la información recibida y envía información de control a los dispositivos dedicados, como el sistema de frenado, el sistema de control de los amortiguadores del paragolpes, y el sistema de visualización.
La PECU detecta objetos usando técnicas de procesamiento de imagen y dispositivos de medición de distancia, que pueden incluir transductores de ultrasonidos, sensores de onda milimétrica, o dispositivos de Detección y Medición de Distancias por Luz (LIDAR) . La información se procesa para realizar tareas de clasificación de objetivos, detección de falsa alarma, y calibración de datos, y la información se envía a la interfaz entre la máquina y el hombre, por ejemplo en el visualizador LCD interactivo 10, formateada como una imagen que presenta los objetos detectados y la distancia medida para cada objeto.
La PECU también puede proporcionar datos de información de colisión a la Unidad de Control Electrónica (ECU) central del automóvil a través de un bus de comunicación múltiplex de vehículos, por ejemplo un bus CAN estándar. En base a la información recibida, la ECU central puede permitir que los sistemas dedicados modulen el sistema de frenado y también configuren los amortiguadores del paragolpes.
La forma de realización preferida proporciona por lo tanto un procedimiento y sistema para la prevención de colisiones a baja velocidad, usando un sistema de medición de distancia y un visualizador de espejo retrovisor integrado que proporcione datos durante la colisión o antes de una colisión para ajustar el amortiguador del paragolpes del vehículo usando un mecanismo controlador de amortiguadores y permitir un sistema de control de 55 frenado que responda a una información de colisión en tiempo real. El Sensor de... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de proporcionar mediciones de distancia para el uso con un vehículo comprendiendo el procedimiento:
la detección visual (2) del área adyacente al vehículo para producir datos de detección visual (21) , en el que dicha detección visual (2) produce una imagen de cámara;
la detección de distancia de los objetos alrededor del vehículo para producir datos de detección de distancia (26) ;
la segmentación (12) de los datos de detección visual (21) umbralizando la intensidad y el tono de los datos de detección visual (21) para producir datos de detección visual segmentados (22) ; y
la combinación de los datos de detección visual segmentados (22) y los datos de detección de distancia (26) para producir una estimación de los objetos alrededor del vehículo (28) , en el que dicha combinación comprende el uso de los datos de detección de distancia (26) para ubicar los objetos dentro de la imagen de cámara.
2. Un procedimiento según se reivindica en la reivindicación 1, que comprende además la utilización de dicha estimación para controlar las características operativas del vehículo (28) . 20
3. Un procedimiento según se reivindica en la reivindicación 2, en el que dicho control incluye la alteración de las características de colisión del paragolpes del vehículo (28) .
4. Un procedimiento según se reivindica en la reivindicación 2, en el que dicho control incluye la 25 alteración de las características de frenado del vehículo (28) .
5. Un procedimiento según se reivindica en la reivindicación 1, en el que dicha detección de distancia incluye la detección de distancia por ultrasonidos o por láser.
6. Un procedimiento según se reivindica en la reivindicación 1, en el que dichos datos de detección visual
(21) se producen en un espacio de color basado en la luminosidad, el color y la saturación.
7. Un procedimiento según se reivindica en la reivindicación 6, en el que los componentes de color y de luminosidad de dicho espacio de color sólo se usan en dicha etapa de combinación. 35
8. Un procedimiento según se reivindica en la reivindicación 1, en el que dicha segmentación (12) de dichos datos de detección visual (21) comprende la segmentación clasificando píxeles como blancos o negros.
9. Un procedimiento según se reivindica en cualquier reivindicación previa que comprende además:
la utilización de una serie de mediciones de calibración en dicha combinación de los datos de detección visual segmentados (22) y los datos de detección de distancia (26) .
10. El procedimiento de la reivindicación 1, en el que dicha combinación comprende:
la realización, antes de dicha segmentación (12) , de una serie de calibraciones de dicha imagen de cámara para determinar una ecuación de la matriz de transformación para encontrar la relación entre al menos un punto de imagen de dicha imagen de cámara y las coordenadas del mundo 3D correspondientes (X, Y, Z) asociadas con dicha imagen de cámara.
11. Un procedimiento según se reivindica en la reivindicación 10, en el que dicha segmentación (12) comprende la segmentación de dichas imágenes de cámara calibradas clasificando píxeles como blancos o negros usando un umbral m en un canal de intensidad I, calculando un tono (H) para los píxeles, y segmentando la imagen usando un umbral superior e inferior.
12. Un procedimiento según se reivindica en la reivindicación 1, que comprende además la etapa de aplanar dichos datos de detección visual segmentados (22) de modo que se reduzca el ruido en los mismos.
13. Un procedimiento según se reivindica en la reivindicación 1, en el que dicho procedimiento se lleva a cabo en un vehículo (28) y dicho procedimiento incluye además la etapa de:
monitorizar el vehículo (28) para activar el procedimiento cuando estén presentes las condiciones predeterminadas.
14. Un procedimiento según se reivindica en la reivindicación 13, en el que dichas condiciones 5 predeterminadas incluyen si el vehículo (28) está al revés.
15. Un procedimiento según se reivindica en la reivindicación 1, en el que dicha detección de distancia (26) comprende la realización de una serie de mediciones de distancia por ultrasonidos de los objetos alrededor del
vehículo (28) . 10
16. Un procedimiento de la reivindicación 1, que comprende además:
la detección de temperatura; y 15 el uso de la temperatura detectada para mejorar la exactitud de dicha detección de distancia (26) .
17. El procedimiento de la reivindicación 1, en el que la ubicación de los objetos dentro de la imagen de cámara se basa en un algoritmo de emparejamiento (25) .
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]