Sistema de compensación de GPS / INS de un vehículo terrestre.
Sistema de navegación (100) de un vehículo terrestre (116) con:
un receptor (102) del sistema de determinación de posición, que puede ser activado para generar
informaciones de posición y de dirección basadas en un sistema de determinación de posición global y alimentarlas a unsistema (5 122) de compensación del sistema de referencia,
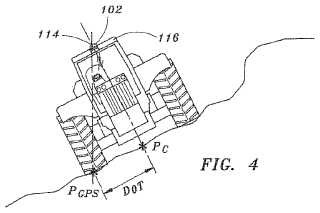
un sistema (122) de compensación del sistema de referencia, que proporciona informaciones de posición ydirección corregidas, que está conectado con el receptor (102) del sistema de determinación de posición y con un aparato(130) de medida de la aceleración dispuesto para la medición de una aceleración lateral del vehículo terrestre (116) para lamedición del ángulo de cabeceo del vehículo terrestre (116) y con un giroscopio (128) para la medición de un régimen deguiñada y/o de un ángulo de guiñada del vehículo terrestre (116), y puede ser activado para compensar las informacionesde posición y dirección del receptor del sistema de determinación de posición por medio de las señales del aparato (130)de medida de la aceleración y del giroscopio (128) en lo referente al ángulo de cabeceo del vehículo terrestre (116) y de laguiñada del vehículo terrestre (116) sobre un punto de giro teniendo en cuenta una distancia de desplazamiento lateral(DOT) entre la posición (PGPS) determinada con el sistema de determinación de posición global y la posición actual de unpunto de referencia o de control deseado (PC) para el vehículo terrestre (116),
y un sistema de control de navegación (104), que recibe las informaciones de posición y dirección corregidaspor el sistema (122) de compensación del sistema de referencia y puede ser empleado para la navegación y/o conducciónautomática del vehículo terrestre (116),
y en el cual el sistema (122) de compensación del sistema de referencia ser activado para calcular la distancia dedesplazamiento lateral (DOT) por medio de una aceleración lateral medida y de una distancia causada por aceleracióncentrífuga, siendo determinada la distancia causada por aceleración centrífuga por medio de cambios en la posición delvehículo terrestre (116) con respecto a la dirección del vehículo terrestre (116).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04101658.
Solicitante: DEERE & COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: ONE JOHN DEERE PLACE MOLINE, ILLINOIS 61265-8098 ESTADOS UNIDOS DE AMERICA.
Inventor/es: NELSON, FREDERICK WILLIAM, REKOW,ANDREW KARL WILHELM, MERCER,DAVID SCOTT, PICKETT,TERENCE DANIEL, JONES,JENNIFER LOUISE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01B69/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01B TRABAJO DE LA TIERRA EN AGRICULTURA O EN SILVICULTURA; PARTES CONSTITUTIVAS O ACCESORIOS DE MAQUINAS O INSTRUMENTOS AGRICOLAS, EN GENERAL (apertura o recubrimiento de surcos o de hoyos para la siembra, plantación o abonado A01C 5/00; máquinas para la recogida de raíces o tubérculos A01D; segadoras convertibles en aparatos para trabajo de la tierra o capaces de trabajar la tierra A01D 42/04; segadoras combinadas con instrumentos para trabajo de la tierra A01D 43/12; trabajo de la tierra para obras públicas o explotaciones mineras E01, E02, E21). › Dirección de máquinas o instrumentos agrícolas; Guía de máquinas o instrumentos agrícolas según un recorrido determinado.
- A01B79/00 A01B […] › Métodos para trabajar la tierra (requiriendo esencialmente el empleo de máquinas particulares, ver los grupos relativos a estas máquinas).
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01C21/16 G01C […] › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
- G05D1/02 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2398105_T3.pdf
Fragmento de la descripción:
Sistema de compensación de GPS / INS de un vehículo terrestre El invento se refiere a un sistema de navegación según el preámbulo de la reivindicación 1 y a un procedimiento según el preámbulo de la reivindicación 8.
Un inconveniente de los sistemas de navegación basados en el Sistema Posicionador Global (en lo que sigue GPS) que se emplean en vehículos agrícolas consiste en que el receptor de GPS de semejantes sistemas sólo puede determinar la posición de la antena de GPS. En la mayoría de los vehículos terrestres el lugar de instalación de la antena está limitado por la exigencia de que a la antena le esté posibilitada una vista libre hacia el cielo, y por lo tanto hacia el satélite del GPS. Esta posición desafortunadamente por regla general no es el punto de referencia deseado (por ejemplo el acoplamiento de un tractor, el eje de un vehículo terrestre, un punto en el suelo por debajo del acoplamiento de un tractor o similares) . Por tal motivo la posición y dirección de marcha del vehículo terrestre determinada por medio del GPS puede ser incorrecta, cuando se atraviesa un terreno accidentado (como terreno con inclinación, elevaciones, valles y similares) , lo que puede tener por consecuencia surcos recorridos repetidas veces o errores de dirección.
Para calcular la posición del punto de referencia deseado, debe realizarse una medición exacta de la orientación espacial (alineación) del vehículo terrestre con respecto al sistema de coordenadas en el cual se navega. Una preparación para la medición de la orientación del vehículo terrestre (véase el documento EP 0 845 198 A) consiste en fijar varias antenas para el GPS en el vehículo en una disposición conocida fija. Cuando se realizan mediciones precisas con el GPS, las posiciones relativas de las antenas, como se miden en un ciclo de exploración del sistema de navegación, pueden emplearse para el cálculo de la orientación (posición, alineación y dirección de marcha) del vehículo terrestre en conjunto. Un sistema de navegación que siga esta preparación requeriría varios receptores de GPS y sería por eso excesivamente costoso.
Alternativamente podría emplearse un sistema de inercia en combinación con el GPS (véase el documento US 6 445 983 B) . En esta preparación el sistema de inercia determina la información primaria de posición y dirección para guiar o conducir el vehículo terrestre. La información proporcionada por el GPS se emplea luego para corregir la deriva de la información de posición y dirección determinada por el sistema de inercia. Los sistemas de inercia comprenden giroscopios para medir el ángulo de balanceo, guiñada e inclinación y pueden presentar también acelerómetros para mejorar la exactitud de la información medida por los giroscopios.
Semejantes sistemas de inercia tienen que trabajar relativamente exactos y por tal motivo para muchas aplicaciones son, como los sistemas con varias antenas, demasiado caros.
Ha sido además propuesto (documentos US 5 987 371 A, US 6 345 231 B) , en caso de vehículos terrestres determinar la posición de un punto de referencia con ayuda de la posición de la antena de GPS y de una matriz de conversión, en la cual ingresan la inclinación lateral del vehículo y/o la inclinación del vehículo en la dirección de marcha y la orientación del vehículo en el plano horizontal sobre un eje de giro vertical (ángulo de guiñada) . Las tres magnitudes citadas son medidas por sensores apropiados, por ejemplo una brújula para el ángulo de guiñada e inclinómetros para las inclinaciones. Si se debe efectuar una conducción automática, se determina el ángulo de conducción con ayuda de las desviaciones del punto de referencia y de la alineación del vehículo de un recorrido teórico. Aquí se somete a la otra evaluación sólo la información de la antena de GPS, mientras que la información de dirección se deriva de las señales de los sensores.
En otro sistema de navegación (documento US 6 236 916 B) se determina la posición y dirección de un vehículo terrestre por medio de la antena del GPS. El ángulo de inclinación lateral (ángulo de cabeceo) es registrado por un sensor y se emplea para la corrección de la posición registrada por medio de la antena del GPS. Existe también un sensor separado para la dirección de marcha, cuyas señales son alimentadas al dispositivo de conducción automática, para posibilitar una conducción estable. Aquí la información de posición y dirección de la antena del GPS es corregida por el ángulo de cabeceo medido. La determinación de dirección por las señales del GPS funciona sólo cuando el vehículo se mueve.
El documento US 5 928 309 A1 describe un sistema de navegación y guiado para un vehículo terrestre, que comprende una antena de GPS y varios sensores locales en forma de brújulas giroscópicas para el registro de la dirección de marcha, un radar Doppler para la medición de la velocidad y un acelerómetro para el registro de la aceleración lateral del vehículo. La señal de posición es generada primero por el radar Doppler y por medio de la altura y dirección de marcha registradas por las brújulas giroscópicas. La antena de GPS proporciona las señales de posición, que con ayuda de la información de dirección registrada localmente son convertidas en posiciones absolutas de un punto de referencia.
En el documento US 5 416 712 A se describe un sistema de determinación de posición, en el cual los datos de dirección de una antena de GPS y de un giroscopio son introducidos en un filtro de Kalman y mezclados unos con otros, para mejorar la exactitud de los datos de dirección.
El problema que sirve de base al invento se ve en proporcionar un sistema de navegación en el cual mediante un sistema de inercia se posibilite una mejora de la información de navegación, como posición, dirección y distancia de surcos, proporcionada por un receptor para un sistema de determinación de posición global, para evitar errores que son causados por un cambio de la orientación del vehículo terrestre (es decir, cabeceo y guiñadas) sobre terreno accidentado, y que sin embargo no haga necesaria la total exactitud de los giroscopios y acelerómetros de los sistemas de inercia convencionales.
Este problema es solucionado según el invento por las enseñanzas de las reivindicaciones 1 y 8, estando indicadas en las otras reivindicaciones particularidades que de manera ventajosa perfeccionan la solución.
Un sistema de navegación para un vehículo terrestre, en particular un vehículo terrestre agrícola, como un tractor, una cosechadora, pulverizadora, recolectora de algodón o similares comprende un sistema de compensación del sistema de referencia, que realiza una compensación de la información que es obtenida por un sistema de determinación de posición global, como posición, dirección, distancia de surcos y similares, para compensar errores que son causados por cambios de la orientación del vehículo terrestre sobre terreno accidentado.
El sistema de compensación del sistema de referencia está conectado con un receptor del sistema de determinación de posición global, que recibe una señal de posición del sistema de posición global (por regla general asociado a un satélite) y a partir de ella deriva informaciones de navegación que incluyen la posición (por ejemplo longitud y ancho) y la dirección del vehículo terrestre. La información de dirección puede ser deducida con ayuda del efecto Doppler de las señales recibidas o de la comparación de dos posiciones fijadas consecutivas. El sistema de compensación del sistema de referencia sustituye la posición y dirección fijadas por el receptor del sistema de determinación de posición por una posición corregida y una dirección corregida, que están corregidas con ayuda de valores de medida de un giroscopio para el registro de la guiñada y de un acelerómetro para el registro del ángulo de cabeceo en lo que se refiere al ángulo de guiñada y al ángulo de cabeceo del vehículo, para proporcionar información de navegación corregida para un punto de referencia del vehículo terrestre, que puede servir para la navegación o para la conducción automática del vehículo terrestre.
En esto se tiene en cuenta una distancia de desplazamiento lateral entre la posición determinada con el sistema de determinación de posición global y la posición actual de un punto de referencia o de control deseado para el vehículo terrestre. La distancia de desplazamiento lateral se calcula por medio de una aceleración lateral medida y de una distancia causada por la aceleración centrífuga, siendo determinada la distancia causada por aceleración centrífuga por medio de cambios en la posición del vehículo terrestre con respecto... [Seguir leyendo]
Reivindicaciones:
1. Sistema de navegación (100) de un vehículo terrestre (116) con:
un receptor (102) del sistema de determinación de posición, que puede ser activado para generar informaciones de posición y de dirección basadas en un sistema de determinación de posición global y alimentarlas a un sistema (122) de compensación del sistema de referencia,
un sistema (122) de compensación del sistema de referencia, que proporciona informaciones de posición y dirección corregidas, que está conectado con el receptor (102) del sistema de determinación de posición y con un aparato (130) de medida de la aceleración dispuesto para la medición de una aceleración lateral del vehículo terrestre (116) para la medición del ángulo de cabeceo del vehículo terrestre (116) y con un giroscopio (128) para la medición de un régimen de guiñada y/o de un ángulo de guiñada del vehículo terrestre (116) , y puede ser activado para compensar las informaciones de posición y dirección del receptor del sistema de determinación de posición por medio de las señales del aparato (130) de medida de la aceleración y del giroscopio (128) en lo referente al ángulo de cabeceo del vehículo terrestre (116) y de la guiñada del vehículo terrestre (116) sobre un punto de giro teniendo en cuenta una distancia de desplazamiento lateral (DOT) entre la posición (PGPS) determinada con el sistema de determinación de posición global y la posición actual de un punto de referencia o de control deseado (PC) para el vehículo terrestre (116) ,
y un sistema de control de navegación (104) , que recibe las informaciones de posición y dirección corregidas por el sistema (122) de compensación del sistema de referencia y puede ser empleado para la navegación y/o conducción automática del vehículo terrestre (116) ,
y en el cual el sistema (122) de compensación del sistema de referencia ser activado para calcular la distancia de desplazamiento lateral (DOT) por medio de una aceleración lateral medida y de una distancia causada por aceleración centrífuga, siendo determinada la distancia causada por aceleración centrífuga por medio de cambios en la posición del vehículo terrestre (116) con respecto a la dirección del vehículo terrestre (116) .
2. Sistema de navegación (100) según la reivindicación 1, en el cual el sistema (122) de compensación del sistema de referencia puede ser activado para emplear la información de dirección del receptor (102) del sistema de determinación de posición para limitar la deriva del giroscopio (128) .
3. Sistema de navegación (100) según la reivindicación 2, en el cual el sistema (122) de compensación del sistema de referencia puede ser activado para determinar una información de dirección compensada por medio de la siguiente ecuación:
CC = [GR/FMEAS] +
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]