Método y sistema para geometría de sensores.
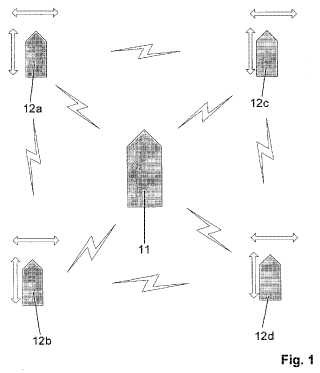
Método para la recogida de datos en operaciones marítimas a partir de una geometría de sensores dinámicamediante el control de formación de los miembros de la formación en forma de vehículos portadores de sensores(11,
12a-d), pudiendo dichos vehículos portadores de sensores (11, 12a-d) funcionar en la superficie marítima ysiendo vehículos pilotados o no pilotados (11, 12a-d), estando dichos vehículos portadores de sensores (11, 12a-d)provistos de uno o más medios sensores, dispuestos en los vehículos portadores de sensores (11, 12a-d) y/odispuestos para los vehículos portadores de sensores (11, 12a-d), como por ejemplo remolcados por los vehículos(11, 12a-d), comprendiendo dicho método los siguientes pasos:
a) obtener los parámetros de definición de la formación pretendidos, establecidos por un centro de comando,
b) obtener los vectores de estado de los miembros de la formación mediante sistemas de navegación paraproporcionar información sobre su posición, velocidad y dirección,
c) comparar el vector de estado de cada vehículo portador de sensor con los parámetros de definición de laformación pretendidos y los vectores de estado de otros miembros de la formación y calcular la distancia relativa(DA) entre los miembros de la formación,
d) obtener la distancia (D) entre los medios sensores del vehículo portador de sensores y el objeto a medir y elángulo de alcance (α) de los medios sensores en relación con el objeto a medir,
e) calcular los nuevos vectores de estado pretendidos para cada vehículo portador de sensores según lacomparación y el cálculo en el paso c), la distancia (D) hasta el objeto a medir y el ángulo de alcance (α) de losmedios sensores en relación con el objeto a medir,
f) calcular la potencia de control para los medios de propulsión de cada vehículo portador de sensores paraconseguir el nuevo vector de estado pretendido según los cálculos del paso e),
g) realizar un cambio dinámico de la distancia relativa (DA) entre los vehículos portadores de sensores mediante elcontrol de la potencia de control de los medios de propulsión de cada vehículo portador de sensores según loscálculos del paso f),
h) repetir continuamente los pasos a) a g) para cada vehículo portador de sensores.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NO2008/000346.
Solicitante: MARITIME ROBOTICS AS.
Nacionalidad solicitante: Noruega.
Dirección: BRATTÖRKAIA 11 PIRTERMINALEN 7010 TRONDHEIM NORUEGA.
Inventor/es: HOVSTEIN,VEGARD EVJEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S5/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
- G01V1/38 G01 […] › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › G01V 1/00 Sismología; Prospección o detección sísmica o acústica. › especialmente adaptado a las zonas recubiertas de agua (G01V 1/28 tiene prioridad).
- G05D1/02 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2430219_T3.pdf
Fragmento de la descripción:
Método y sistema para geometría de sensores La presente invención se refiere a un método para la recogida de datos en operaciones marítimas desde una geometría de sensores dinámica, mediante el control de formación de los miembros de formación en forma de vehículos portadores de sensores, para obtener la geometría de sensores pretendida, según el preámbulo de la reivindicación 1. Dicha invención se refiere asimismo a un sistema para llevar a cabo el método según el preámbulo de la reivindicación 10.
ANTECEDENTES
Actualmente, los vehículos están provistos de diversos tipos de sistemas de sensores para la recogida de datos. Algunos sensores/aplicaciones comunes pueden ser: ecosondas multihaz/exploración submarina, sonar/pesca,
sonar/detección de minas, hidrófonos/sismología marítima, escáner laser/sondeo topográfico y similares.
Los sistemas de sensores de los vehículos tendrán un alcance limitado. Este problema se suele solucionar haciendo que el portador de sensores (el vehículo) siga unos patrones repetitivos y parcialmente solapados, para poder interpolar los resultados medidos a un resultado medido general para una zona concreta. Los vehículos portadores de sensores habitualmente experimentan una gran cantidad de uso diario. Para aumentar la eficacia de la recogida de datos del vehículo, existen tres claras alternativas:
1. aumentar la velocidad de los portadores de sensores, cubriendo así una zona más amplia por unidad de tiempo;
2. aumentar el alcance de los sensores; y
3. aumentar el número de sensores.
La velocidad a la que se puede realizar la medición (la velocidad del vehículo) a menudo se ve limitada debido a las limitaciones de la técnica de medición (calidad de los datos medidos) .
El alcance de los sensores también puede verse limitado por la técnica de medición. A menudo se prefiere tener una alta resolución en el sensor, por lo que la zona real de búsqueda del sensor debe ser baja.
Aumentar el número de sensores no es en absoluto una solución posible, ya que los sensores siguen dependiendo de su disposición en el vehículo, y por tanto su alcance se solapará.
A partir del documento US n.º 2006235584 se conoce un método para controlar las maniobras de un vehículo autónomo en una red que comprende una pluralidad de vehículos autónomos. El método comprende la monitorización del estado del vehículo autónomo, la recepción periódica de datos sobre los estados de un subgrupo de la pluralidad de vehículos autónomos, y la determinación periódica de al menos una orden a un circuito de control
para el vehículo autónomo basándose en el estado monitorizado y los datos del subgrupo de la pluralidad de vehículos autónomos.
El documento US n.º 2003208320 da a conocer un método y un dispositivo que comprende un sistema de control activo para un dispositivo de buque sísmico remolcado que permite cualquier control de posición relativa de 45 cualquier cantidad de buques sísmicos remolcados. El dispositivo y el método permiten la maniobra de un dispositivo sísmico mientras el buque remolque mantiene el rumbo o el propio buque maniobra para colaborar en la reubicación del dispositivo. El sistema permite el mantenimiento de la posición y geometría específica del dispositivo en presencia de factores ambientales variables 50 No se conoce ninguna publicación que dé a conocer o sugiera métodos para conseguir una geometría de sensores pretendida mediante un control de formación de una embarcación portadora de sensores.
OBJETIVO
El objetivo de la presente invención es proporcionar un método para crear una geometría de sensores dinámica mediante un control de formación de una embarcación portadora de sensores para conseguir una geometría de sensores pretendida. Otro objetivo adicional de la presente invención es facilitar la recogida de datos reales mediante la embarcación de formación controlada en una geometría de sensores pretendida. El vehículo portador de sensores puede funcionar en tierra (vehículo de conducción) , sobre el agua (vehículo flotante) , bajo el agua 60 (vehículo sumergido) y/o en el aire (vehículo volador) . Dicho vehículo puede ser tripulado o no. El vehículo portador de sensores puede estar provisto de uno o más medios sensores, dispuestos dentro o encima del vehículo portador de sensores y/o fuera del vehículo portador de sensores de maneras adecuadas, como por ejemplo remolcadas tras el vehículo.
LA INVENCIÓN
En la reivindicación 1 se define un método según la presente invención. En las reivindicaciones 2 a 9 se definen otras características ventajosas de dicho método. En la reivindicación 10 se define un sistema según la presente invención. En las reivindicaciones 11 a 15 se definen más características ventajosas de dicho sistema.
Una forma de realización del método según la presente invención puede aumentar la eficacia de medición y el alcance, aumentando el número de sensores. Dichos sensores se disponen en su correspondiente vehículo portador de sensores, estando dicho vehículo controlado para una geometría de sensores pretendida para los sensores mediante el método según la presente invención. La referencia al vehículo portador hecha en el presente documento engloba todo tipo de vehículos que puedan transportar sensores, que pueden funcionar en tierra, agua y/o aire, y que pueden ser tripulados o no. El vehículo portador de sensores está provisto de uno o más medios sensores que están acoplados con el vehículo portador de sensores de maneras adecuadas, como por ejemplo remolcados tras el vehículo.
Otra forma de realización de un método según la presente invención puede utilizar información sobre el ángulo de alcance de los sensores para mantener un solapamiento fijo, aunque la distancia hasta el objeto medido varíe. Ello se obtiene al variar la distancia relativa entre el vehículo portador de sensores.
Si, por ejemplo, se utilizan vehículos portadores de sensores no tripulados, que se mantienen en una posición física mediante un método para geometría de sensores según la presente invención, es posible aumentar el número de sensores, por ejemplo, al realizar exploraciones marinas, sin que por ello aumente significativamente el coste correspondiente. Los costes de funcionamiento y operación de los vehículos portadores de sensores no tripulados suelen ser considerablemente menores que los de los vehículos portadores de sensores tripulados de capacidad similar.
Mediante un método para geometría de sensores según la presente invención, se puede conseguir una geometría de sensores dinámica mediante el control de formación del vehículo portador de sensores. La geometría es controlable y, por tanto, es posible realizar un cambio dinámico de la geometría relativa de los sensores, según la operación que se quiera llevar a cabo.
Un método para crear una geometría de sensores según la presente invención puede resumirse en los pasos siguientes:
a) obtener los parámetros de definición de formación pretendidos, establecidos por un centro de comando, b) obtener los vectores de estado de los miembros de la formación a partir de sistemas de navegación, para proporcionar información sobre su posición, velocidad y dirección, c) comparar el vector de estado de cada vehículo portador de sensores con los parámetros de definición de formación pretendidos y los vectores de estado de otros miembros de la formación y calcular la distancia relativa (DA) entre los miembros de la formación, d) obtener la distancia (D) entre los medios sensores del vehículo portador de sensores y el objeto a medir y el ángulo de alcance (α) de los medios sensores en relación con el objeto a medir, e) calcular los nuevos vectores de estado pretendidos para cada vehículo portador de sensores, basándose en la comparación y el cálculo del paso c) , la distancia (D) hasta el objeto a medir y el ángulo de alcance (α) de los medios sensores en relación con el objeto a medir, f) calcular la potencia de control para los medios de propulsión de cada vehículo portador de sensores para conseguir el nuevo vector de estado pretendido según los cálculos del paso e) , g) cambiar dinámicamente la distancia relativa (DA) entre los vehículos portadores de sensores, controlando la potencia de control de los medios d propulsión de cada vehículo portador de sensores según el cálculo en el paso f) , h) repetir continuamente los pasos a) a g) para cada vehículo portador de sensores.
El paso a) comprende la obtención de parámetros definidos manualmente que definen la geometría de sensores/forma de la formación... [Seguir leyendo]
Reivindicaciones:
1. Método para la recogida de datos en operaciones marítimas a partir de una geometría de sensores dinámica mediante el control de formación de los miembros de la formación en forma de vehículos portadores de sensores (11.
12. d) , pudiendo dichos vehículos portadores de sensores (11.
12. d) funcionar en la superficie marítima y siendo vehículos pilotados o no pilotados (11.
12. d) , estando dichos vehículos portadores de sensores (11.
12. d) provistos de uno o más medios sensores, dispuestos en los vehículos portadores de sensores (11.
12. d) y/o dispuestos para los vehículos portadores de sensores (11.
12. d) , como por ejemplo remolcados por los vehículos (11.
12. d) , comprendiendo dicho método los siguientes pasos:
a) obtener los parámetros de definición de la formación pretendidos, establecidos por un centro de comando, b) obtener los vectores de estado de los miembros de la formación mediante sistemas de navegación para proporcionar información sobre su posición, velocidad y dirección, c) comparar el vector de estado de cada vehículo portador de sensor con los parámetros de definición de la formación pretendidos y los vectores de estado de otros miembros de la formación y calcular la distancia relativa (DA) entre los miembros de la formación, d) obtener la distancia (D) entre los medios sensores del vehículo portador de sensores y el objeto a medir y el ángulo de alcance (α) de los medios sensores en relación con el objeto a medir, e) calcular los nuevos vectores de estado pretendidos para cada vehículo portador de sensores según la comparación y el cálculo en el paso c) , la distancia (D) hasta el objeto a medir y el ángulo de alcance (α) de los medios sensores en relación con el objeto a medir, f) calcular la potencia de control para los medios de propulsión de cada vehículo portador de sensores para conseguir el nuevo vector de estado pretendido según los cálculos del paso e) , g) realizar un cambio dinámico de la distancia relativa (DA) entre los vehículos portadores de sensores mediante el control de la potencia de control de los medios de propulsión de cada vehículo portador de sensores según los cálculos del paso f) , h) repetir continuamente los pasos a) a g) para cada vehículo portador de sensores.
2. Método según la reivindicación 1, caracterizado porque el paso a) comprende la obtención de los parámetros definidos manualmente que definen la forma de la formación, conforme a la distancia relativa y posición de los miembros de la formación.
3. Método según la reivindicación 1, caracterizado porque el paso a) comprende además la obtención de otros parámetros de control, conforme a uno o más de entre: anchura de búsqueda de los medios sensores, u otros parámetros medidos por sensores que indiquen la necesidad de un cambio de formación para conseguir una mejora en la calidad de la técnica de medición.
4. Método según cualquiera de las reivindicaciones 1 a 3, caracterizado porque el paso g) comprende el control de la potencia de control de los medios de propulsión de cada vehículo portador de sensores según una comparación continua entre el nuevo vector de estado pretendido y el vector de estado propio presente en cada momento determinado en el vehículo correspondiente, para un rápido control de la potencia de control de los medios de propulsión.
5. Método según cualquiera de las reivindicaciones 1 a 4, caracterizado porque el paso f) comprende además el uso del vector de estado propio de cada vehículo portador de sensores como referencia para una comparación continua con el nuevo vector de estado pretendido para cada vehículo portador de sensores y un continuo ajuste de la potencia de control de los medios de propulsión para cada vehículo portador de sensores para alcanzar el vector de estado pretendido de cada vehículo portador de sensores.
6. Método según la reivindicación 1, caracterizado porque se llevan a cabo los pasos d) a g) por medios de control de formación provistos de software/algoritmos y/o programados para ello.
7. Método según cualquiera de las reivindicaciones 1 a 6, caracterizado por el uso de un sistema de navegación o un sistema de medición para proporcionar información sobre la distancia (D) entre los medios sensores y el objeto a medir u otros parámetros medidos por sensores, que indican la necesidad de un cambio en la formación para una mejora en la técnica de medición.
8. Método según cualquiera de las reivindicaciones 1 a 7, caracterizado por el uso de unos medios sensores con un ángulo de alcance (α) fijo.
9. Método según cualquiera de las reivindicaciones 1 a 8, caracterizado porque dicho método comprende el mantenimiento de un solapamiento fijo de la zona de alcance de los medios sensores.
10. Sistema para llevar a cabo el método según las reivindicaciones 1 a 9, comprendiendo dicho sistema uno o más miembros de formación en forma de vehículos portadores de sensores (11.
12. d) , pudiendo dichos vehículos portadores de sensores (11.
12. d) funcionar en la superficie marítima y siendo vehículos pilotados o no pilotados
(11.
12. d) , estando dichos vehículos portadores de sensores (11.
12. d) provistos de uno o más medios sensores, dispuestos en los vehículos portadores de sensores (11.
12. d) y/o dispuestos para los vehículos portadores de sensores (11.
12. d) , como por ejemplo remolcados por los vehículos (11.
12. d) , caracterizado porque cada vehículo portador de sensores (11.
12. d) comprende un sistema de control (100, 100') que comprende medios de control de formación (101) , medios de propulsión (102) , un sistema de navegación (103) y medios para detectar la distancia (D) entre los medios sensores del vehículo portador de sensores (11.
12. d) y el objeto a medir.
11. Sistema según la reivindicación 10, caracterizado porque los medios de control de formación (101) están dispuestos para la recepción de parámetros de definición de la formación (104, 107) y/o vectores de estado (105,
108) de los miembros de la formación, y el vector de estado propio (106, 109) de los vehículos portadores de sensores (11.
12. d) .
12. Sistema según las reivindicaciones 10 y 11, caracterizado porque el sistema de navegación (103) está
dispuesto para proporcionar el vector de estado (106, 108) del vehículo portador de sensores (11.
12. d) . 15
13. Sistema según la reivindicación 10, caracterizado porque dicho sistema comprende sistemas de medición para proporcionar parámetros medidos por sensor que indican la necesidad de un cambio en la formación para una mejora en la técnica de medición.
14. Sistema según la reivindicación 10, caracterizado porque los medios de control de formación (101) están provistos de software/algoritmos y/o programados para la comparación del vector de estado propio (106, 109) de los vehículos portadores de sensores (12a-d) con parámetros de definición de la formación (104, 107) y/o vectores de estado (105, 108) pretendidos de los miembros de la formación, y están provistos con software/algoritmos y/o programados para calcular un nuevo vector de estado pretendido para los vehículos portadores de sensores (11,
12a-d) .
15. Sistema según la reivindicación 10, caracterizado porque los medios de propulsión (102) están dispuestos para calcular la potencia de control y establecer la potencia de control en los vehículos portadores de sensores (11, 12ad) para conseguir un vector de estado pretendido.
REFERENCIAS CITADAS EN LA DESCRIPCIÓN
Esta lista de referencias citadas por el solicitante se proporciona únicamente para la comodidad del lector. No forma parte del documento de patente Europea. Aunque las referencias se han recopilado cuidadosamente, no se pueden excluir errores u omisiones y la OEP declina toda responsabilidad en este sentido.
Documentos de patentes citados en la descripción · US 2006235584 A [0007] · US 2003208320 A [0008]
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]