CIP-2021 : G05D 1/02 : Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/02[1] › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/02 · Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP2021: Invenciones publicadas en esta sección.
Sistema y método para probar tecnologías de prevención de accidentes.
(02/03/2016) Un sistema de Objetivo Blando Guiado (OBG) que comprende:
un vehículo objeto (VO) con un sensor de posición de VO y un sensor de velocidad de VO;
un elemento de movimiento dinámico (EMD) con un sensor de posición de EMD en que el EMD comprende un cuerpo que comprende una superficie superior en que la superficie superior está adaptada para soportar un cuerpo blando que tiene el tamaño y la forma de un vehículo o de una parte de un vehículo, en que el cuerpo tiene al menos un lado cónico de manera que permite que el vehículo objeto avanzar hasta y sobre la superficie superior con un daño mínimo o ningún…
Robot limpiador, sistema de control remoto y método del mismo.
(24/02/2016) Un sistema de control remoto de un robot limpiador, comprendiendo el sistema:
un robot limpiador configurado para crear un mapa de limpieza con respecto a una región de limpieza que debe ser limpiada realizando una operación de limpieza para la región de limpieza; y
un dispositivo terminal configurado para controlar el robot limpiador generando un comando de control con respecto a el robot limpiador ,
caracterizado porque:
el robot limpiador está configurado para crear un mapa de grado contaminante a partir del mapa de limpieza detectando un grado contaminante de la región de limpieza después de crear el mapa de limpieza; y
el dispositivo terminal está configurado para controlar el robot limpiador…
Procedimiento y dispositivo para la determinación de la posición de un vehículo, programa de ordenador y producto de programa de ordenador.
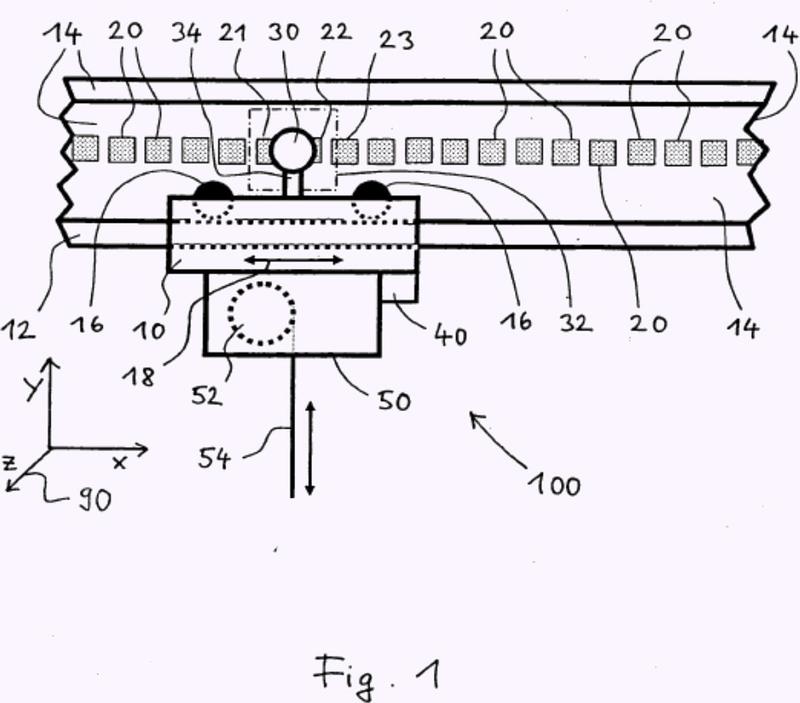
(17/02/2016). Ver ilustración. Solicitante/s: PEPPERL + FUCHS GMBH. Inventor/es: Hofmann,Hilmar, Opper,Rüdiger, Kirsch,Martin.
Procedimiento para determinar la posición de un vehículo que se mueve a lo largo de una trayectoria estando dispuestos a lo largo de la trayectoria marcadores , especialmente soportes de código o códigos de barras, caracterizado porque los marcadores se registran con una cámara digital dispuesta en el vehículo y porque, mediante procesamiento de imágenes, a partir de la imagen de al menos una imagen de marcador (71 a 74) en el área de alcance de la cámara digital se determina una posición relativa del vehículo con respecto al marcador correspondiente o a los marcadores correspondientes en el sentido de un sentido de movimiento principal (x) del vehículo a lo largo de la trayectoria y en al menos un sentido (y, z) transversal con respecto al sentido de movimiento principal (x) y porque a partir de cambios del tamaño de las imágenes de marcadores (71 a 74) se determinan cambios de distancia (Δz) del vehículo con respecto a la trayectoria.
PDF original: ES-2564810_T3.pdf
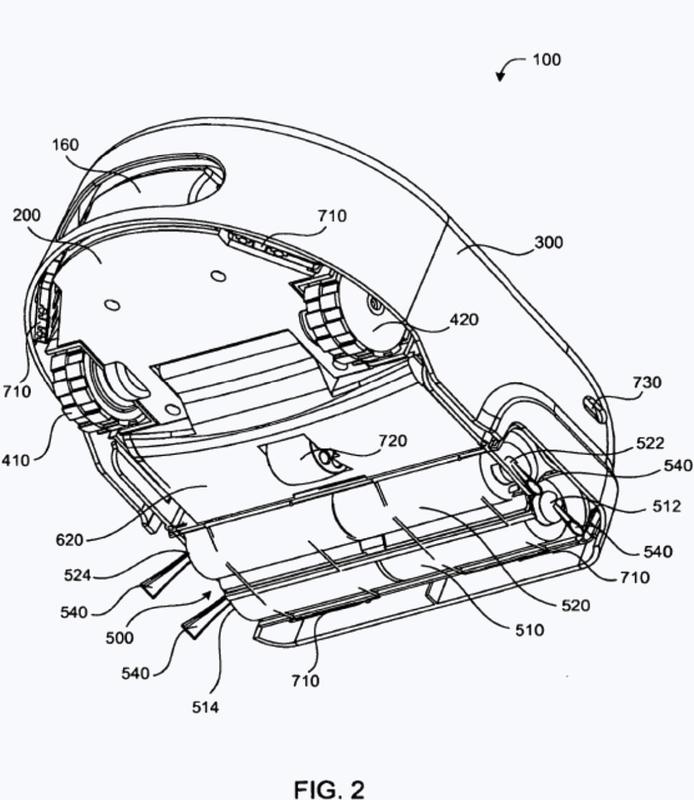
Robot autónomo de cubrimiento compacto.
(10/02/2016). Ver ilustración. Solicitante/s: IROBOT CORPORATION. Inventor/es: MAMMEN,JEFFREY W, SCHNITTMAN,MARK, DUBROVSKY,ZIVTHAN A, SOLOCHEK,AARON.
Robot autónomo de cubrimiento que comprende:
un chasis que tiene partes delantera y posterior , definiendo la parte delantera una forma sustancialmente rectangular y definiendo la parte posterior una forma arqueada;
un sistema de accionamiento portado por el chasis configurado para maniobrar el robot sobre una superficie de limpieza;
ruedas motrices accionadas de manera diferencial derecha e izquierda ;
un conjunto de limpieza montado en la parte delantera del chasis ; y
un compartimento de basura dispuesto adyacente al conjunto de limpieza y configurado para recibir residuos agitados por el conjunto de limpieza ;
caracterizado por que el robot comprende además sensores antichoque dispuestos en las esquinas delanteras del chasis , con al menos un sensor antichoque dispuesto a cada lado de cada esquina, permitiendo así que el robot determine una dirección y / o una ubicación de una colisión.
PDF original: ES-2559128_T3.pdf
Procedimiento y dispositivo para determinar un intervalo de mantenimiento de un vehículo, programa informático y producto de programa informático.
(08/02/2016) Procedimiento para determinar un intervalo de mantenimiento de un vehículo, que se mueve a lo largo de una pista , en donde se registran y archivan datos de posición del vehículo , en donde se determina al menos un parámetro de mantenimiento, en donde el parámetro de mantenimiento se compara con un valor de referencia prefijado y en donde para indicar cuándo debe realizarse el mantenimiento del vehículo se emite una señal, si el parámetro de mantenimiento está en una relación determinada con el valor de referencia, en especial si es mayor que el valor de referencia, caracterizado porque el vehículo es un teleférico monorraíl, una carretilla para estanterías elevadas, una instalación de grúa o un carro de grúa, porque a…
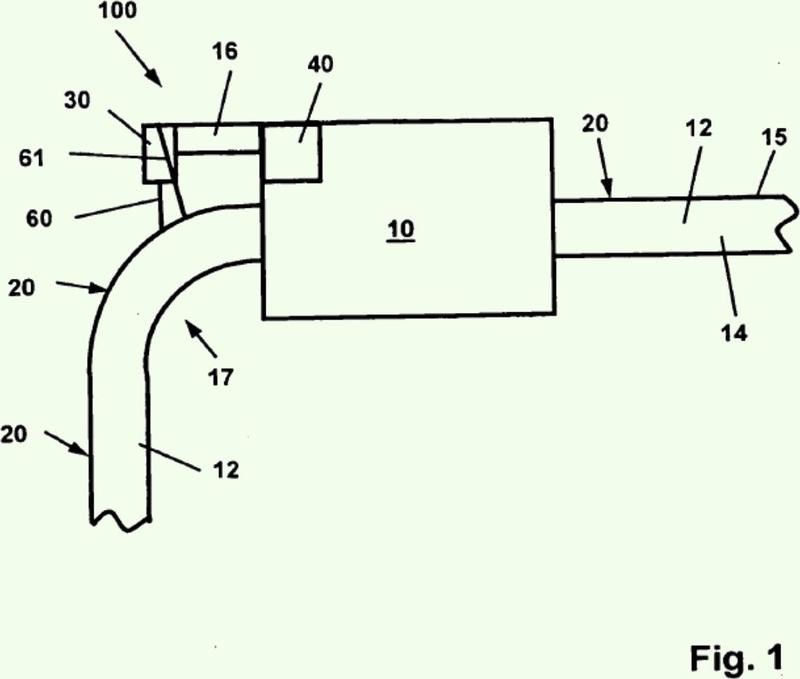
Procedimiento y dispositivo para la determinación de la posición de un vehículo, programa de ordenador y producto de programa de ordenador.
(01/02/2016). Ver ilustración. Solicitante/s: PEPPERL + FUCHS GMBH. Inventor/es: Hofmann,Hilmar, Opper,Rüdiger, Kirsch,Martin.
Procedimiento para la determinación de la posición de un vehículo que se mueve a lo largo de una vía , estando dispuestos a lo largo de la vía marcadores , en particular soportes de código o códigos de barras, que son detectados con una cámara digital dispuesta en el vehículo , caracterizado porque a partir de una posición de al menos una imagen de marcador en la zona de detección de la cámara digital y de una forma de la imagen de marcador o de las imágenes de marcadores se determina una posición relativa del vehículo respecto al marcador correspondiente o a los marcadores correspondientes con ayuda de procesamiento de imagen, porque se determina al menos un ángulo de basculamiento (ß) de un eje óptico de la cámara digital respecto a la vía y porque a partir de la distancia (E) de la cámara digital de un marcador y del ángulo de basculamiento (ß) o de los ángulos de basculamiento se determina una posición real de la cámara digital encima de la vía.
PDF original: ES-2558022_T3.pdf
Procedimiento para la limpieza o el tratamiento de una habitación por medio de un aparato autodesplazable.
(27/01/2016) Procedimiento para la limpieza o el tratamiento de una habitación por medio de un aparato autodesplazable , con los pasos de
- creación de un mapa de la habitación,
- almacenamiento del mapa de la habitación dentro de una memoria de datos,
- selección de una zona parcial de la habitación mediante la toma de una foto de la zona parcial por un usuario,
- transmisión de los datos locales de la zona parcial seleccionada a un ordenador conectado a la memoria de datos,
- comparación de los datos locales de la zona parcial seleccionada con los datos locales contenidos en el mapa para la identificación de la zona parcial por medio del ordenador y
- limpieza o tratamiento de la habitación…
Procedimiento y dispositivo para determinar la posición de un vehículo, programa de ordenador y producto de programa de ordenador.
(13/01/2016) Procedimiento para determinar la posición de un vehículo, que se mueve a lo largo de una pista , en donde a lo largo de la pista están dispuestos unos marcadores , en especial unos soportes de datos o códigos de barras, en donde los marcadores se detectan con una cámara digital dispuesta sobre el vehículo , y en donde mediante tratamiento de imágenes a partir de una posición de al menos una imagen de marcador, dentro del margen de detección de la cámara digital , se determina una posición relativa del vehículo con relación al respectivo marcador o el marcador respectivo, caracterizado porque en base a los datos de medición de un sensor de aceleración acoplado al vehículo se determina un recorrido (s) cubierto por el vehículo hasta un momento de consulta (t), porque se calcula una posición…
BALIZA PARA OBSTÁCULOS A LA NAVEGACIÓN AÉREA.
(04/01/2016) 1. Baliza para obstáculos a la navegación aérea, del tipo de las que se sitúa en la parte superior del obstáculo señalamiento e iluminación del mismo, dotada de una carcasa estanca que incluye en su interior un circuito electrónico que alimenta y controla el funcionamiento de una serie de LED , que está provista de una placa soporte que dispone de medios de fijación al aerogenerador, comprendiendo dicha baliza:
- un módulo de comunicaciones por radiofrecuencia (RF), adecuado para transferir datos relativos a su funcionamiento, a otras balizas aledañas y/o a una baliza maestra, provista de un medio de comunicación remoto, que permite el control y la inspección remota del conjunto de balizas situadas en una zona concreta;
-…
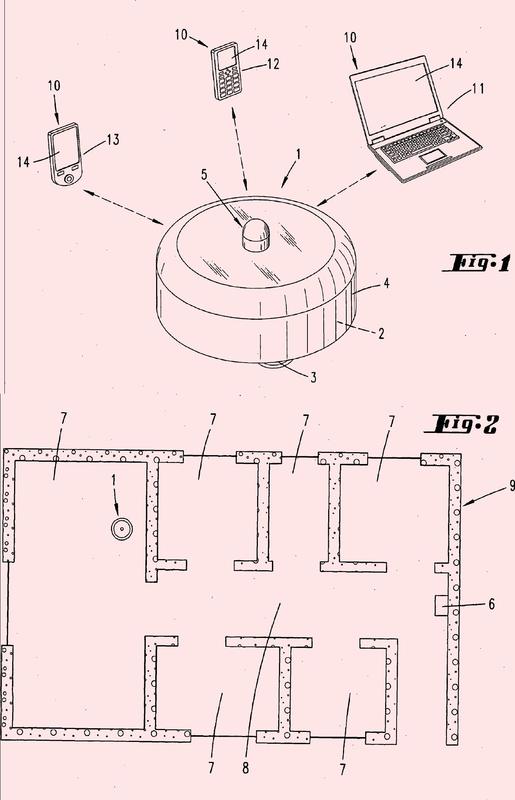
Procedimiento para el control de un robot.
(18/12/2015). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: KEMKER, UWE, SCHLISCHKA, PATRICK, WALLMEYER,MARIO.
Procedimiento para el control de un robot , con preferencia de un robot de barrar y/o de aspirar desplazable de forma autónoma, en el que en el robot se crea y se registra un mapa del entorno o bien de una vía de desplazamiento predeterminada, en el que, además, un aparato exterior actúa para el control sobre el robot , se transmite el mapa fuera del robot sobre el aparato exterior y se representa la posición del robot dentro del mapa , caracterizado por que el mapa del entorno se crea en el aparato exterior y el mapa creado de esta manera se transmite al robot.
PDF original: ES-2554381_T3.pdf
Sistema y método para la gestión de unidades de accionamiento móviles.
(04/12/2015) Un sistema de inventario automatizado para transportar artículos de inventario, que comprende:
una unidad de accionamiento móvil autoalimentada operable para: recibir una respuesta de ruta que identifica un camino entre un primer punto y un segundo punto, en donde:
el camino comprende al menos un segmento inicial y uno o más segmentos adicionales;
el segmento inicial incluye una parte del camino adyacente al primer punto; y al menos uno de los segmentos adicionales incluye una parte del camino adyacente al segundo punto;
almacenar el camino ;
transmitir una petición de reserva para reservar el segmento inicial del camino ;
recibir una respuesta de reserva que indica que se ha reservado el segmento inicial;
alejarse del primer punto a lo largo…
Aparato de trabajo robótico para un área de trabajo limitada.
(25/11/2015) Aparato de trabajo para un área de trabajo limitada (S), comprendiendo el aparato:
• una estación base configurada para generar un campo magnético (B) que se extiende al menos en parte por el área de trabajo;
• un robot autopropulsado que tiene un modo de funcionamiento normal en el que realiza un ciclo de trabajo en el área de trabajo y un modo de regreso a base en el que regresa automáticamente a la estación base, comprendiendo el robot autopropulsado:
• medios para mover (20, 20a) el robot autopropulsado en el área de trabajo, en función de una señal impulsora de movimiento (S_amm);
caracterizado por que el robot autopropulsado comprende además:
• un giroscopio…
Sistema y procedimiento de conducción automática y de aviso de datos o señales de tráfico para trenes y vehículos rodados.
(14/09/2015) Sistema y procedimiento de conducción automática y de aviso de datos o señales de tráfico para trenes y vehículos rodados, que consiste en colocar en la zona delantera, trasera o inferior del vehículo al menos un sistema detector y captador de señales utilizando unos elementos, franjas, bandas reflectantes codificadas y dispuestas en las calzadas o las traviesas, las señales captadas se aplican directamente a avisadores luminosos o sonoros, a un microprocesador o al procesador principal del tren o vehículo, estos últimos decodifican y comparan las señales obtenidas con la velocidad de dicho vehículo, calculando y proporcionando señales…
Vehículo robotizado telecomandado.
(10/07/2015) Vehículo robotizado telecomandado, siendo del tipo de los que disponen de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de una maleta de control, de forma que el vehículo comprende: dos juegos de ruedas, uno a cada lateral, accionado cada uno por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas; un primer brazo articulado montado sobre una torreta giratoria 360º; un segundo brazo articulado y giratorio respecto de un eje vertical de montaje y unos medios de doble articulación de montaje de la torreta…
Aparato de control para vehículo autónomo sin personal que opera en una disposición de cable de zona.
(24/06/2015) Un aparato para controlar un vehículo operativo autónomo sin personal que tiene un motor eléctrico que recibe potencia de una batería para operar una máquina operativa , primeros motores para mover ruedas , y sensores magnéticos para detectar LA intensidad de un campo magnético de un cable de zona , siendo controlado el vehículo de manera que se mueva en una zona operativa definida por el cable de zona a través de las ruedas movidas por los primeros motores para realizar una operación usando la máquina operativa, y siendo controlado el vehículo para volver a un dispositivo de carga instalado en el cable de zona con el fin…
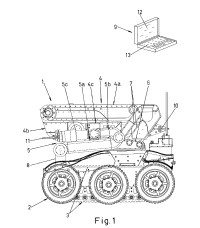
VEHÍCULO ROBOTIZADO TELECOMANDADO.
(28/05/2015). Ver ilustración. Solicitante/s: PROYTECSA SECURITY, S.L. Inventor/es: SALLEN ROSELLO,CESAR.
Vehículo robotizado telecomandado, siendo del tipo de los que disponen de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de una maleta de control, de forma que el vehículo comprende: dos juegos de ruedas, uno a cada lateral, accionado cada uno por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas; un primer brazo articulado montado sobre una torreta giratoria 360º; un segundo brazo articulado y giratorio respecto de un eje vertical de montaje y unos medios de doble articulación de montaje de la torreta para su desplazamiento respecto del eje longitudinal del vehículo, de manera que con los dos juegos de ruedas y los dos juegos de oruga se desplaza por todo tipo de terrenos y con los movimientos combinados de los dos brazo articulados sujeta y manipula los objetos a examen.
Procedimiento y dispositivo flotante autónomo de servocontrol de posición de una embarcación náutica.
(08/04/2015) Dispositivo flotante autónomo de servocontrol de posición de una embarcación móvil , caracterizado por que comprende:
- un medio de determinación de posición geográfica,
- un órgano de propulsión
- una fuente de energía para alimentar el órgano de propulsión,
- un medio de orientación de la fuerza ejercida por el órgano de propulsión,
- un medio de fijación de un cabo a la citada embarcación,
- un medio de selección de una zona geográfica y
- medios de control del órgano de propulsión y del medio de orientación, adaptados, en función de la posición geográfica del dispositivo para mantener el dispositivo en la citada…
Procedimiento para la determinación de la posición de un aparato desplazable automáticamente.
(01/04/2015) Procedimiento para la determinación de la posición de un aparato desplazable automáticamente, en particular aparato acumulador de polvo del suelo desplazable automáticamente, con ruedas de desplazamiento accionadas con preferencia con motor eléctrico, en el que el aparato está provisto con una unidad de reconocimiento de obstáculos (A), que está constituida por unidades ópticas de emisión y de recepción, en el que, además, se calculan una pluralidad de posiciones y de alineaciones posibles a partir de una primera supuesta posición del aparato , previamente calculada, una posición y/o una alineación posibles del aparato se designan en este caso también como partículas, y después de un desplazamiento correspondiente del…
Aparato de control para vehículo operativo autónomo sin personal.
(21/01/2015) Un aparato incluyendo un vehículo operativo autónomo sin personal que tiene un motor eléctrico que recibe potencia de una batería para operar una máquina operativa , motores principales para mover ruedas , y sensores magnéticos para detectar la intensidad de un campo magnético de un cable de zona del aparato, estando adaptado el aparato para controlar el vehículo para que circule en una zona operativa definida por el cable de zona a través de ruedas movidas por los motores principales para realizar una operación en un modo operativo usando la máquina operativa y para que vuelva a un dispositivo de carga instalado en el cable de zona con el fin de cargar la batería,
donde el aparato incluye además:
una porción…
Aparato de control de vehículo operativo autónomo sin personal.
(16/01/2015) Un aparato incluyendo un vehículo operativo autónomo sin personal que tiene un motor eléctrico al que se le suministra potencia desde una batería para operar una máquina operativa , impulsores principales para mover ruedas , y sensores magnéticos para detectar la intensidad de un campo magnético de un cable de zona del aparato, estando adaptado el aparato para controlar el vehículo para que se mueva en una zona operativa definida por el cable de zona a través de ruedas movidas por los impulsores principales para realizar una operación usando la máquina operativa y para volver a un dispositivo de carga instalado en el cable de zona con el fin de cargar la batería,
donde el aparato incluye además:
un detector de distancia de cable de zona (42, S10-S24)…
Aparato para medir la distancia entre dos vehículos de transporte público.
(15/10/2014) Aparato para medir una distancia entre un primer y un segundo vehículo de transporte público (V1, V2) que se pueden acoplar o desacoplar mecánicamente de modo que:
- por lo menos una sección delantera de dicho primer vehículo contiene un dispositivo de vídeo que tiene por lo menos una cámara (CAM) y una sección trasera de dicho segundo vehículo contiene un motivo (P1, P2, P3, L2, D2, CP2...) concebida para que sea captada por dicha cámara de vídeo,
- dicho motivo comprende una pluralidad de marcas cuyas características geométricas de las imágenes cambian según va variando la distancia entre los dos vehículos,
- dicho aparato comprende una unidad de tratamiento (CU) concebida para detectar dichos cambios de dichas características…
Robot Autónomo de Cubrimiento.
(01/10/2014) Un robot autónomo de cubrimiento comprende:
un sistema de tracción configurado para maniobrar el robot de acuerdo con una configuración de partida y una configuración de velocidad;
un sensor de parachoques sensible a una colisión del robot con un obstáculo en una dirección delantera; y caracterizado porque comprende adicionalmente
un sensor de proximidad sensible a un obstáculo potencial en la dirección delantera del robot;
en el que el sistema de tracción se configura para reducir la configuración de velocidad en respuesta a una señal desde el sensor de proximidad que indica la detección de un obstáculo potencial, mientras que continúa avanzando el robot de acuerdo con la configuración de partida; y
en el que el sistema de tracción…
Cobertura multimodo para un robot autónomo.
(06/08/2014) Un robot móvil , que comprende:
(a) medios para mover el robot sobre una superficie;
(b) un sensor de detección de obstáculos ;
(c) y un sistema de control conectado de manera operativa a dicho sensor de detección de obstáculos y a dichos medios de movimiento;
(d) estando configurado dicho sistema de control para hacer funcionar el robot en una pluralidad de modos, comprendiendo dicha pluralidad de modos: un modo de seguimiento de obstáculo mediante el cual dicho robot se desplaza de manera adyacente a un obstáculo, y un modo de rebote mediante el cual el robot se desplaza sustancialmente en una dirección alejándose de un obstáculo después de encontrarse un obstáculo,
caracterizado por que el robot móvil comprende además
sensores de desnivel que impiden que el robot móvil…
Sistema y método para la detección de obstáculos.
(22/07/2014) Sistema y método para la detección de obstáculos.
La presente invención describe un método de detección de obstáculos en las inmediaciones de una máquina, que comprende la adquisición de un par de imágenes por medio de unas cámaras estereoscópicas, el procesamiento de dichas imágenes y la determinación de la existencia de obstáculos en una zona de interés de la escena en base al mapa tridimensional elaborado. El procesamiento de dichas imágenes comprende diversas subetapas. También se provee un sistema de detección de obstáculos adaptado para llevar a cabo las etapas del método.
Método de localización y mapeo simultáneo para dispositivos robóticos.
(14/07/2014) Método de localización y mapeo simultáneo para dispositivos robóticos que comprende al menos las etapas de asociación, localización y actualización del mapa o mapeado y que se caracteriza porque la modelización del mapa en la etapa de mapeado está basada en entidades denominadas objetos, definidas como una secuencia de puntos móviles ajustables dinámicamente en tamaño con el fin de representar la forma de los contornos de los obstáculos reales detectados por al menos un sensor del dispositivo robótico; y donde cada punto de la secuencia que representa los objetos tiene asociado una posición y un peso que indica el grado de movilidad del mismo. La idea básica es crear…
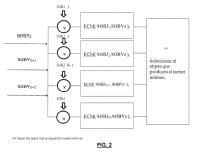
MÉTODO DE LOCALIZACIÓN Y MAPEO SIMULTÁNEO PARA DISPOSITIVOS ROBÓTICOS.
(19/06/2014). Ver ilustración. Solicitante/s: UNIVERSIDAD DE ALICANTE. Inventor/es: MARTÍNEZ MARÍN,Tomás, LOPEZ REDONDO,Eduardo.
Método de localización y mapeo simultáneo para dispositivos robóticosque comprende al menos las etapas de asociación, localización y actualización del mapa o mapeado y que se caracteriza por que la modelización del mapa en la etapa de mapeado está basada en entidades denominadas objetos, definidas como una secuencia de puntos móviles ajustables dinámicamente en tamaño con el fin de representar la forma de los contornos de los obstáculos reales detectados por al menos un sensor del dispositivo robótico; y donde cada punto de la secuencia que representa los objetos tiene asociado una posición y un peso que indica el grado de movilidad del mismo. La idea básica es crear un modelo del entorno por el que se desplaza el vehículo al mismo tiempo que éste se encuentra localizado.
Método para teleoperar un vehículo terrestre no tripulado con una cámara con desplazamiento horizontal y tal vehículo terrestre.
(18/06/2014) Un método de teleoperar un vehículo terrestre no tripulado que comprende una primera unidad de accionamiento y una segunda unidad de accionamiento, comprendiendo cada una un motor y orugas o ruedas, estando dichas orugas o ruedas simétricamente situadas a cada lado de la línea central a lo largo de la dirección de desplazamiento hacia adelante del vehículo, y una cámara de movimiento horizontal, dispuesta frente o detrás del centro de rotación nominal (z) del vehículo, controlando un operador de dicho método la rotación de la cámara desacoplada de la rotación del vehículo y controlando el movimiento del vehículo en cada instante de tiempo…
Procedimiento y sistema para la movilidad en un entorno urbano y extraurbano.
(04/06/2014) Un procedimiento para la movilidad en el entorno urbano y extraurbano, comprendiendo el procedimiento:
- proporcionar una red de carreteras distribuida por el territorio y compuesta de ramales que permiten el tránsito alineado de vehículos y dotada de estaciones para permitir que los pasajeros se suban en los vehículos y bajen de los mismos, ramificaciones para el desvío de vehículos a una 5 estación o a otro ramal , y vías de entrada para la entrada de vehículos procedentes de una estación o de otro ramal ;
- proporcionar una flota de vehículos destinados al transporte de pasajeros , cada uno equipado con una unidad local de control que permite al menos la funcionalidad de una navegación automatizada por la red 10 de carreteras;
- proporcionar…
Dispositivo para la comprobación y el ajuste de sistemas de asistencia al conductor de vehículos a motor al final de la cinta.
(14/05/2014) Dispositivo para la comprobación y el ajuste de sistemas de asistencia al conductor de vehículos a motor al final de la cinta, caracterizado por que están previstos medios para transportar un vehículo a motor en un dispositivo de suspensión, por que están previstos medios para posicionar y fijar el sistema de suspensión, por que están previstos medios para medir la posición del sistema de coordenadas de la carrocería del vehículo en el sistema de coordenadas del dispositivo, por que están previstos medios para calibrar y ajustar los sistemas de asistencia al conductor considerando la posición del eje de desplazamiento dinámico con respecto al sistema de coordenadas de la carrocería del vehículo a motor.
Sistema de asistencia al aparcamiento de un vehículo, vehículo que incluye el mismo y método de asistencia al aparcamiento de un vehículo.
(23/04/2014) Un sistema de asistencia al aparcamiento de un vehículo que comprende:
una cámara que captura una imagen de una zona cercana a un vehículo ;
una primera sección de guía del vehículo que reconoce una posición de una unidad de transmisión de energía eléctrica externa al vehículo en base a la imagen obtenida a través de la cámara para guiar al vehículo hacia la unidad de transmisión de energía eléctrica;
caracterizado por
una sección de recepción de energía eléctrica que recibe energía eléctrica de la unidad de transmisión de energía eléctrica de una manera sin contacto; una segunda sección de guía del vehículo que guía el vehículo en base a la energía eléctrica recibida por la sección de recepción de…
Seguimiento de dispositivo móvil.
(09/04/2014) Método que comprende:
obtener una imagen de un objetivo en un espacio definido ;
analizar la imagen para obtener los datos de identificación y los datos de la posición de la imagen, comprendiendo los datos de la posición de la imagen una posición en la imagen de un punto de referencia con respecto al objetivo ;
utilizar los datos de identificación para obtener los datos de la ubicación del objetivo que comprenden una ubicación del objetivo en el espacio definido ; y
determinar la ubicación del punto de referencia en el espacio definido combinando los datos de la posición de la imagen y los datos de la ubicación…
Control de un barco propulsado por chorro de agua.
(12/02/2014) Procedimiento para corregir el efecto negativo de una alteración sobre los datos de rumbo proporcionados por un sensor de rumbo de una embarcación, que comprende:
medir una cantidad de error de medición inducido por el efecto de por lo menos una alteración sobre por lo menos uno de entre datos de rumbo x, y, y z de un sensor de rumbo;
adquirir por lo menos uno de entre datos de rumbo x, y, y z del sensor de rumbo;
determinar si está produciéndose dicha por lo menos una alteración;
corregir los datos de rumbo al producirse la alteración añadiendo un valor de corrección a los datos de rumbo que compensa la cantidad medida de error de medición inducido por la alteración;
producir…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}