8 inventos, patentes y modelos de DUBROVSKY,ZIVTHAN A
(02/04/2019) Un sistema de robot de cobertura autónomo que comprende:
un contestador de límite activo que comprende un cable alimentado con una corriente modulada colocado a lo largo de un perímetro (1006A,1006B) de una propiedad ; al menos un contestador de límite pasivo (600,600A,600B,600C,600D,600E,600F,600G,600H,600I,6010,6010A,6010B,6010C) colocado en el interior de una propiedad (1001 A) limitado por el contestador de límite activo ; y
un robot para el cuidado del césped autónomo que comprende:
un cuerpo ; un sistema de accionamiento transportado por el cuerpo y configurado para maniobrar el robot a lo largo del interior de la propiedad (1001A);
y
un sistema…
Eliminación de residuos de robots de limpieza.
Sección de la CIP Necesidades corrientes de la vida
(10/12/2018). Solicitante/s: IROBOT CORPORATION. Clasificación: A47L9/10.
Una estación de acoplamiento del robot que comprende:
un alojamiento de estación;
una plataforma de acoplamiento que porta el alojamiento de estación y configurada para soportar un robot cuando se acopla;
un contenedor de recogida ;
un filtro de aspiración ; y
un sistema de aspiración ciclónica o sin bolsa circulatorio configurado para aspirar aire y residuos del contenedor de limpieza del robot , con el fin de depositar los residuos en el contenedor de residuos utilizando la aceleración centrípeta de los residuos para desviar los residuos de un flujo de aire o del filtro de aspiración , en la que el filtro de aspiración es amovible de la estación de acoplamiento de robots con el contenedor de recogida de residuos.
PDF original: ES-2693223_T3.pdf
Robot para el cuidado del césped.
Sección de la CIP Física
(13/09/2018). Solicitante/s: IROBOT CORPORATION. Clasificación: G05D1/02.
Un cortacésped robot que comprende:
un cuerpo ;
un sistema de accionamiento transportado por el cuerpo y configurado para maniobrar el robot a lo largo del césped ;
una cortadora de césped (200, 200A, 200B, 2000A, 2050, 2100, 2200) transportada por el cuerpo ;
y
un detector de borde de franja (310A, 310B, 310C, 310D, 310E, 310F, 310G, 310H, 310I) transportado por el cuerpo y configurado para detectar un borde de franja entre el césped cortado y el césped no cortado , mientras el sistema de accionamiento maniobra el robot a lo largo del césped mientras sigue un borde de franja detectado ,
caracterizado por que el detector de borde de franja (310, 310A, 310B, 310C, 310D, 310E, 310F, 310G, 310H, 310I) incluye un calibrador (320, 320A, 320B) que monitoriza el césped no cortado adyacente al borde de franja para la calibración del detector de borde de franja (310, 310A, 310B, 310C, 310D, 310E, 310F, 310G, 310H, 310I).
PDF original: ES-2681523_T3.pdf
Secciones de la CIP Física Técnicas industriales diversas y transportes Necesidades corrientes de la vida
(14/09/2016). Solicitante/s: IROBOT CORPORATION. Clasificación: G05D1/02, B60L11/18, B60L11/12, A01D34/00, B60L3/00.
Un cortacésped robot que comprende:
un cuerpo ;
un sistema de accionamiento transportado por el cuerpo y configurado para maniobrar el robot a lo largo del césped;
un controlador transportado por el cuerpo y en comunicación con el sistema de accionamiento ; al menos un sensor de obstáculos transportado por el cuerpo y configurado para detectar un obstáculo potencial próximo al robot;
en donde el controlador se configura para funcionar en un modo de configuración de control en el cual un usuario maniobra el robot para circunnavegar y acercarse a límites, obstáculos y/o áreas resguardadas marcadas mientras el robot se encuentra en un modo manual y permitir el funcionamiento del robot en un modo autónomo solo después de haber completado el modo de configuración de control,
caracterizado por que el sistema de accionamiento se configura para dirigir el robot a una velocidad más rápida durante el modo manual que en el modo autónomo.
PDF original: ES-2654513_T3.pdf
Eliminación de residuos de robots de limpieza.
Sección de la CIP Necesidades corrientes de la vida
(20/04/2016). Solicitante/s: IROBOT CORPORATION. Clasificación: A47L11/40, A47L9/10, A47L11/33.
Una estación de mantenimiento para mantener un limpiador robótico que comprende:
un alojamiento de estación y una plataforma sobre la que el limpiador robótico está soportado durante su servicio de mantenimiento;
un contenedor de recogida fijado de manera amovible al alojamiento en el que el contenedor de recogida es diferente de un contenedor de limpiador situado en el limpiador robótico porque su propósito principal es recoger y acumular a partir del contenedor de limpiador del limpiador robótico ; y
una interfaz de usuario amovible y utilizable a distancia externamente a la estación de mantenimiento y configurada para comunicar inalámbricamente a un módulo de comunicación sobre la estación de mantenimiento y/o a una instalación de comunicación compatible sobre el limpiador robótico , en que la interfaz de usuario incluye un indicador de contenedor de recogida lleno de la estación de mantenimiento.
PDF original: ES-2583374_T3.pdf
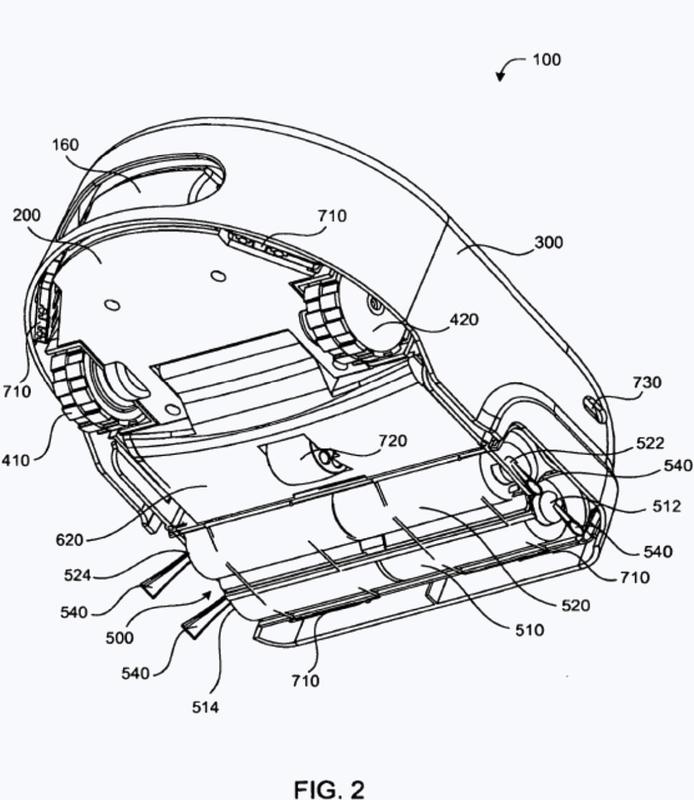
Robot autónomo de cubrimiento compacto.
(08/03/2016) Robot autónomo de cubrimiento que comprende:
un chasis que tiene partes delantera y posterior , definiendo la parte delantera una forma sustancialmente rectangular y definiendo la parte posterior una forma arqueada;
un sistema de accionamiento portado por el chasis configurado para maniobrar el robot sobre una superficie de limpieza;
ruedas motrices accionadas de manera diferencial derecha e izquierda ;
un conjunto de limpieza montado en la parte delantera del chasis ;
un compartimento de basura dispuesto adyacente al conjunto de limpieza y configurado para recibir residuos agitados por el conjunto de limpieza ;
un sensor antichoque configurado para detectar movimiento en múltiples direcciones;
caracterizado por que…
Robot autónomo de cubrimiento compacto.
(02/03/2016) Un robot autónomo de cubrimiento que comprende:
un chasis que tiene una parte delantera y una parte posterior , definiendo la parte delantera una forma sustancialmente rectangular y definiendo la parte posterior una forma arqueada;
un sistema de accionamiento portado por la parte posterior del chasis y configurado para maniobrar el robot sobre una superficie de limpieza, comprendiendo el sistema de accionamiento ruedas motrices derecha e izquierda accionadas de manera diferencial por motores correspondientes derecho e izquierdo ;
un controlador en comunicación con el sistema de accionamiento , donde el controlador está configurado para maniobrar el robot a fin de que pivote sobre sí mismo;
un conjunto de limpieza montado…
Robot autónomo de cubrimiento compacto.
Secciones de la CIP Física Necesidades corrientes de la vida
(10/02/2016). Ver ilustración. Solicitante/s: IROBOT CORPORATION. Clasificación: G05D1/02, A47L9/28, A47L9/00, A47L9/04.
Robot autónomo de cubrimiento que comprende:
un chasis que tiene partes delantera y posterior , definiendo la parte delantera una forma sustancialmente rectangular y definiendo la parte posterior una forma arqueada;
un sistema de accionamiento portado por el chasis configurado para maniobrar el robot sobre una superficie de limpieza;
ruedas motrices accionadas de manera diferencial derecha e izquierda ;
un conjunto de limpieza montado en la parte delantera del chasis ; y
un compartimento de basura dispuesto adyacente al conjunto de limpieza y configurado para recibir residuos agitados por el conjunto de limpieza ;
caracterizado por que el robot comprende además sensores antichoque dispuestos en las esquinas delanteras del chasis , con al menos un sensor antichoque dispuesto a cada lado de cada esquina, permitiendo así que el robot determine una dirección y / o una ubicación de una colisión.
PDF original: ES-2559128_T3.pdf
{kind=link}