Sistema y método para la detección de obstáculos.
Sistema y método para la detección de obstáculos.
La presente invención describe un método de detección de obstáculos en las inmediaciones de una máquina,
que comprende la adquisición de (10) un par de imágenes por medio de unas cámaras estereoscópicas, el procesamiento de dichas imágenes y la determinación de la existencia de obstáculos (46) en una zona de interés de la escena en base al mapa tridimensional elaborado. El procesamiento de dichas imágenes (40) comprende diversas subetapas. También se provee un sistema de detección de obstáculos adaptado para llevar a cabo las etapas del método.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330063.
Solicitante: IDNEO TECHNOLOGIES, S.L.
Nacionalidad solicitante: España.
Inventor/es: PUIG CASTELLO,Albert.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
- G06K9/00 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
- G08G1/16 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas anticolisión.
Fragmento de la descripción:
Sistema y método para la detección de obstáculos OBJETO DE LA INVENCiÓN
La presente invención está dirigida a un sistema y un método para la detección de obstáculos en los alrededores de una máquina en la que se instala dicho sistema. Es aplicable a cualquier maquinaria industrial cuya actuación pueda afectar a personas u otros obstáculos que se encuentren a su alrededor.
ANTECEDENTES DE LA INVENCiÓN
El sector de la construcción se considera entre los más peligrosos en la industria, con tasas de mortalidad muy altas. Los trabajadores pueden ser golpeados por maquinaria mientras realizan tareas de mantenimiento ya que los campos de visión son limitados. De manera habitual el personal debe realizar tareas en la maquinaria desde los extremos de la misma e incluso debajo de ella.
Esta situación se plantea en muy diversos campos, desde la maquinaria industrial, pasando por vehículos pesados con poca visibilidad, el sector ferroviario, etc. En cierto modo, el sector ferroviario ofrece además otros condicionantes que no suelen darse de manera conjunta en otros sectores. Por una parte, los vehículos presentan diversos elementos en sus extremos que pueden interferir, ocultar o falsear los sistemas de detección. Por otra parte, se suelen encadenar diferentes maquinas en forma de convoy para traslados desde la zona de aparcamiento hasta la zona de trabajo, por lo que debe de permitirse que dos máquinas se acerquen hasta tocarse sin que salte ninguna parada de emergencia. Además, la maquinaria tan solo puede desplazarse a lo largo de la vía, por lo que la presencia de elementos al margen de la vía tampoco debe ser considerada como peligro de seguridad. El límite entre lo que se debe considerar como obstáculo susceptible de ser arrollado y lo que se debe de considerar como elemento marginal, es muy estrecho. Esta consideración condicionará de manera importante las tecnologías utilizables en este dispositivo.
Para maquinaria muy pesada en canteras y otros entornos existen detectores radar como el descrito en DE 1997 07465. Estos sistemas de detección se apoyan en la mayoría de casos de pantallas de imagen en el puesto de conducción para que el operario verifique la naturaleza del obstáculo. Si bien cumplen su misión en los entornos en los que se aplican, poseen varias limitaciones: por una parte, no es funcional para distancias inferiores a 70 cm, debido la propia condición del pulso de radar. Por otra parte, el detector debe situarse de manera que el haz de emisión sea paralelo al plano del suelo, dejando sin cubrir la zona más próxima al vehículo y extendiéndose más allá del margen de la vía, lo que provocaría falsos positivos. Por último, la ubicación del detector en la zona inferior del vehículo interferiría con los dispositivos funcionales propios del vehículo.
Otro tipo de sistemas, usados sobre todo en automoción, son los sistemas de ultrasonidos. No obstante, estos sistemas deben situarse igualmente en la zona inferior de la maquinaria y direccionarse en sentido horizontal, por lo que incurren en parte de los problemas que sufren los detectores radar. Su característica de radiación hace necesaria la distribución de un determinado número de sensores a lo largo del área a cubrir, dificultando aún más su instalación.
DESCRIPCiÓN DE LA INVENCiÓN
La presente invención propone una solución particular a los problemas anteriores mediante un método según la reivindicación 1 y un sistema según la reivindicación 8 para la detección de obstáculos en las inmediaciones de una máquina. En las rei vindicaciones dependientes se definen realizaciones preferidas de la invención .
En un primer aspecto inventivo, la invención presenta un método de detección de obstáculos en las inmediaciones de una máquina, que comprende las siguientes etapas: a) adquirir un par de imágenes de una escena por medio de unos medios de adquisición de imágenes configuradas para obtener imágenes estereoscópicas;
b) procesar las imágenes adquiridas, comprendiendo la etapa de procesamiento:
b1) corregir la distorsión de lentes en las imágenes capturadas;
b2) realizar un alineamiento de la línea epipolar de las imágenes;
b3) calcular la disparidad de los puntos de las imágenes y construir un mapa de disparidad; y
b4) elaborar un mapa tridimensional a partir del mapa de disparidad, mediante la transformación de la disparidad de cada punto en una distancia de dicho punto al
plano que contiene a los medios de adquisición de imágenes; y
c) determinar si existen obstáculos en una zona de interés de la escena en base al
mapa tridimensional elaborado.
El plano que contiene los medios de adquisición de imágenes se define como un plano que pasa por el foco de la lente y es paralelo a dicha lente.
En una realización particular, el método comprende adicionalmente la etapa de seleccionar una pluralidad de puntos relevantes (43) de las imágenes después de la etapa b2) , de modo que el cálculo de disparidad (44) de la etapa b3) se lleva a cabo sólo con dichos puntos relevantes.
A lo largo de la descripción, se entenderán como "puntos relevantes" aquellos puntos de las imágenes en los que haya suficiente información como para realizar correlaciones.
Ventajosamente, llevar a cabo el método sólo con puntos relevantes, agiliza el proceso de determinación de obstáculos, disminuyendo el tiempo y la posibilidad de errores de procesado.
En una realización particular, la etapa c) de determinar si existen obstáculos en una zona de interés comprende: c1) caracterizar una pluralidad de puntos con la posición espacial de cada uno de ellos,
c2) identificar agrupaciones de puntos, y
c3) determinar las tres dimensiones y la posición de las agrupaciones de puntos identificadas.
En una realización particular, la identificación de agrupaciones de puntos comprende: determinar para cada punto cuántos puntos vecinos existen, siendo un punto vecino aquel que se encuentra a una distancia menor o igual que una distancia d predefinida, e identificar las agrupaciones, siendo una agrupación un conjunto de puntos tal que cada uno de ellos tiene un número de puntos vecinos pertenecientes a la misma agrupación mayor o igual que un número de puntos vecinos predefinido a una distancia menor o igual que la distancia d predefinida.
En una realización particular, el método comprende valorar si alguna de las agrupaciones de puntos identificadas supone un riesgo, en base a su posición espacial en la escena y a sus dimensiones.
En una realización particular, el método comprende una etapa de actuación sobre la máquina en caso de que la determinación de la existencia de al menos un obstáculo en una zona de interés de la escena haya resultado positiva.
En una realización particular, el método comprende pre-procesar las imágenes adquiridas antes de la etapa b) de procesamiento.
En una realización particular, el método comprende transmitir las imágenes pre-procesadas desde unos medios de pre-procesamiento a unos medios de procesamiento.
En un segundo aspecto inventivo, la invención presenta un sistema para la detección de obstáculos en las inmediaciones de una máquina, que comprende: medios de captura de imagen destinados a disponerse en la máquina y que comprenden dos cámaras configuradas para obtener imágenes estereoscópicas, y medios de procesamiento adaptados para llevar a cabo las etapas b) y c) del método de la reivindicación 1-7_
En una realización particular, el sistema comprende medios de control para controlar unos parámetros de actuación de los medios de captura.
En una realización particular, el sistema comprende medios de pre-procesamiento para preprocesar las imágenes adquiridas.
En una realización particular, el sistema comprende medios de transmisión para transmitir las imágenes pre-procesadas desde los medios de pre-procesamiento a los medios de procesamiento, comprendiendo los medios de transmisión un serializador, un cable de par trenzado y un deserializador.
En una realización particular, el sistema comprende adicionalmente medios de actuación adaptados para actuar sobre la máquina.
En una realización particular, el sistema comprende adicionalmente medios de alerta adaptados para emitir una señal de alerta.
Estos sistemas pueden ser empleados en cualquier tipo de maquinaria industrial cuyo movimiento, o el de algunas de sus partes, pueda afectar a obstáculos o personas que se encuentren a su alrededor.
Todas las características y/o las etapas de métodos descritas en esta memoria (incluyendo las reivindicaciones, descripción...
Reivindicaciones:
1. Método de detección de obstáculos en las inmediaciones de una máquina, que comprende las siguientes etapas: a) adquirir (10) un par de imágenes de una escena por medio de unos medios de adquisición de imágenes configuradas para obtener imágenes estereoscópicas;
b) procesar las imágenes adquiridas (40) , comprendiendo la etapa de procesamiento:
b1) corregir la distorsión de lentes (41) en las imágenes capturadas;
b2) realizar un alineamiento de la línea epi polar (42) de las imágenes;
b3) calcular la disparidad (44) de los puntos de las imágenes y construir un mapa de disparidad ; y
b4) elaborar un mapa tridimensional (45) a partir del mapa de disparidad,
mediante la transformación de la disparidad de cada punto en una distancia de dicho punto al plano que contiene a los medios de adquisición de imágenes; y
c) determinar si existen obstáculos (46) en una zona de interés de la escena en base al mapa tridimensional elaborado.
2. Método de detección de obstáculos en las inmediaciones de una máquina según la reivindicación anterior, que comprende adicionalmente la etapa de seleccionar una pluralidad de puntos relevantes (43) de las imágenes después de la etapa b2) , de modo que el cálculo de disparidad (44) de la etapa b3) se lleva a cabo sólo con dichos puntos relevantes.
3. Método de detección de obstáculos según cualquiera de las reivindicaciones 1 o 2, donde la etapa c) de determinar si existen obstáculos (46) en una zona de interés comprende:
c1) caracterizar una pluralidad de puntos (47) con la posición espacial de cada uno de ellos,
c2) identificar agrupaciones de puntos (48) , y
c3) determinar las tres dimensiones y la posición de las agrupaciones de puntos (48) identificadas.
4. Método de detección de obstáculos según la reivindicación 3, donde la identificación de agrupaciones de puntos (48) comprende:
determinar para cada punto cuántos puntos vecinos existen, siendo un punto vecino aquel que se encuentra a una distancia menor o igual que una distancia d predefinida, e identificar las agrupaciones (51) , siendo una agrupación un conjunto de puntos tal que cada uno de ellos tiene un número de puntos vecinos pertenecientes a la misma agrupación mayor o igual que un número de puntos vecinos predefinido a una distancia menor o igual que la distancia d predefinida.
5. Método de detección de obstáculos según cualquiera de las reivindicaciones 3 Ó 4, que comprende valorar si alguna de las agrupaciones de puntos identificadas supone un riesgo (50) , en base a su posición espacial en la escena y a sus dimensiones.
6. Método de detección de obstáculos según cualquiera de las reivindicaciones anteriores, que comprende una etapa de actuación sobre la máquina (60) en caso de que la determinación de la existencia de al menos un obstáculo (46) en una zona de interés de la escena haya resultado positiva.
7. Método de detección de obstáculos según cualquiera de las reivindicaciones anteriores, que comprende pre-procesar (20) las imágenes adquiridas antes de la etapa b) de procesamiento.
8. Método de detección de obstáculos según la reivindicación 7, que comprende transmitir
(30) las imágenes pre-procesadas (40) desde unos medios de pre-procesamiento a unos medios de procesamiento.
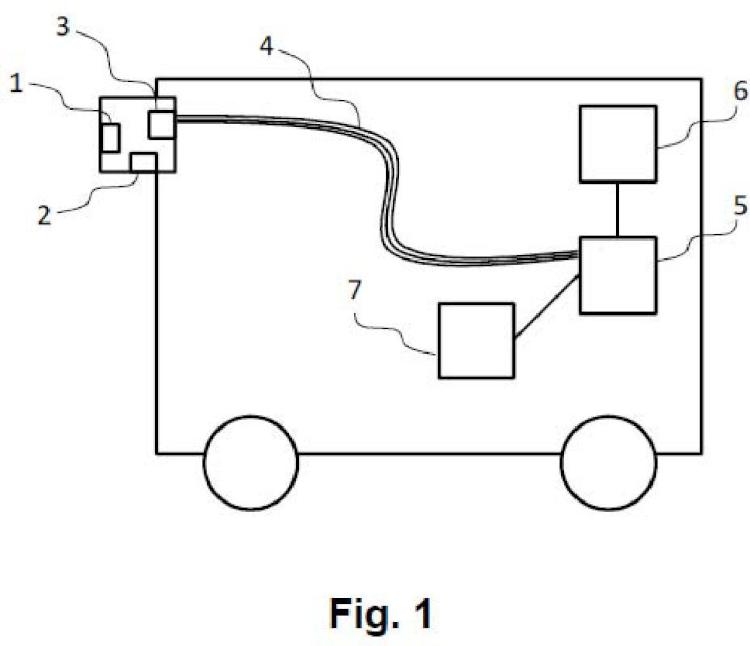
9. Sistema para la detección de obstáculos en las inmediaciones de una máquina, que comprende: medios de captura de imagen (1) destinados a disponerse en la máquina y que comprenden dos cámaras configuradas para obtener imágenes estereoscópicas, y medios de procesamiento (5) adaptados para llevar a cabo las etapas b) y c) de un método según cualquiera de las reivindicaciones 1 a 8.
10. Sistema para la detección de obstáculos según la reivindicación 9, que comprende medios de control (2) para controlar unos parámetros de actuación de los medios de captura (1 ) .
11. Sistema para la detección de obstáculos según cualquiera de las reivindicaciones 9 a 10, que comprende medios de pre-procesamiento (3) para pre-procesar las imágenes adquiridas.
12. Sistema para la detección de obstáculos según la reivindicación 11 , que comprende medios de transmisión (4) para transmitir las imágenes pre-procesadas desde los medios de pre-procesamiento a los medios de procesamiento, comprendiendo los medios de transmisión un serializador, un cable de par trenzado y un deserializador.
13. Sistema para la detección de obstáculos según cualquiera de las reivindicaciones 9 a 10 12, que comprende adicionalmente medios de actuación (6) adaptados para actuar sobre la máquina.
14. Sistema para la detección de obstáculos según cualquiera de las reivindicaciones 9 a 13, que comprende adicionalmente medios de alerta adaptados para emitir una señal de 15 alerta.
Patentes similares o relacionadas:
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]