Aparato de control de vehículo operativo autónomo sin personal.
Un aparato incluyendo un vehículo operativo autónomo sin personal (10) que tiene un motor eléctrico (20) al que se le suministra potencia desde una batería (30) para operar una máquina operativa (16),
impulsores principales (24) para mover ruedas (14), y sensores magnéticos (34) para detectar la intensidad de un campo magnético de un cable de zona (72) del aparato, estando adaptado el aparato para controlar el vehículo para que se mueva en una zona operativa (70) definida por el cable de zona a través de ruedas movidas por los impulsores principales para realizar una operación usando la máquina operativa y para volver a un dispositivo de carga (74, 84) instalado en el cable de zona con el fin de cargar la batería,
donde el aparato incluye además:
un detector de distancia de cable de zona (42, S10-S24) adaptado para detectar la distancia del cable de zona en base a la intensidad detectada del campo magnético detectado por los sensores magnéticos; y
un selector de trayectoria de retorno (42, S28-S40) adaptado para seleccionar una trayectoria diferente de una pluralidad de trayectorias de retorno que están predefinidas a lo largo del cable de zona con respectivas distancias del cable de zona (72), siempre que el vehículo tenga que volver al dispositivo de carga instalado en el cable de zona para cargar la batería,
caracterizado porque el selector de trayectoria de retorno cambia alternativamente una dirección de entrada del vehículo (10) al dispositivo de carga (74, 84) entre hacia la derecha y hacia la izquierda en la zona operativa (70) siempre que el vehículo tenga que volver (S14-S18) al dispositivo de carga (74, 84).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13154132.
Solicitante: HONDA MOTOR CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: 1-1, MINAMI-AOYAMA 2-CHOME MINATO-KU TOKYO 107-8556 JAPON.
Inventor/es: YAMAMURA,MAKOTO, KAWAKAMI,TOSHIAKI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2526889_T3.pdf
Fragmento de la descripción:
Aparato de control de vehículo operativo autónomo sin personal
Antecedentes
Campo técnico
Una realización de la invención se refiere a un aparato de control de un vehículo operativo autónomo sin personal, en particular a un aparato para controlar un vehículo operativo para que se mueva de forma autónoma en una zona operativa para realizar una operación usando una máquina operativa montada.
Antecedentes de la invención
Se han propuesto convencionalmente varios vehículos operativos autónomos sin personal que se mueven de forma autónoma en zonas operativas para realizar operaciones usando máquinas operativas montadas (tales como cuchillas cortacésped), como se describe, por ejemplo, en la Publicación Internacional número WO 2005/074362.
En WO 2005/074362, un sensor magnético montado en un extremo delantero de un vehículo operativo detecta la intensidad de un campo magnético de un cable de zona colocado a lo largo de un borde de una zona operativa para reconocer la zona operativa, y una máquina operativa montada incluyendo cuchillas cortacésped y provista de un motor eléctrico es movida para realizar la operación en la zona operativa reconocida.
El motor del vehículo de la técnica indicada en WO 2005/074362 recibe potencia de una batería montada. Con el fin de cargar la batería, se coloca un dispositivo de carga en el cable de zona y cuando disminuye el nivel de batería restante, el vehículo es controlado para que vuelva al dispositivo de carga a lo largo del cable de zona con la ayuda del sensor magnético.
Resumen
El vehículo descrito en WO 2005/074362 está configurado para que vuelva al dispositivo de carga dispuesto en el cable de zona para cargar la batería cuando disminuya el nivel de batería restante como se ha mencionado anteriormente. Dado que el vehículo se mueve en una misma trayectoria o ruta siempre que vuelve al dispositivo de carga, las ruedas del vehículo forman pistas o surcos en el suelo a lo largo del cable de zona y esto puede degradar desventajosamente el aspecto de la zona operativa después de la operación.
En EP 2 413 215 A2, en la que se basa el preámbulo de la reivindicación 1, el recorrido de retorno del vehículo a la estación de carga se varía entre una desviación mínima y una desviación máxima, para lograr el mismo efecto de la presente invención, es decir, para evitar el desgaste o daño del césped a lo largo del alambre por las ruedas motrices del vehículo, que es un cortacésped.
Por lo tanto, un objeto de una realización de la invención es superar el inconveniente anterior proporcionando un aparato de control de un vehículo operativo autónomo sin personal que tiene un motor eléctrico que recibe potencia de una batería para accionar una máquina operativa para realizar una operación, aparato que puede evitar el daño del aspecto de la tierra de la zona operativa debido a una trayectoria en las pistas o surcos formados cuando el vehículo vuelve a un dispositivo de carga para cargar la batería.
Con el fin de lograr el objeto, la realización de la invención proporciona en el primer aspecto un aparato para guiar un vehículo operativo autónomo sin personal según la reivindicación 1.
Con el fin de lograr el objeto, la realización de la invención proporciona en el segundo aspecto un método para controlar un vehículo operativo autónomo sin personal según la reivindicación 7.
Breve descripción de los dibujos
Los anteriores y otros objetos y ventajas serán más evidentes por la descripción siguiente y los dibujos en los que:
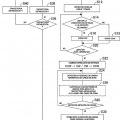
La figura 1 es una vista lateral de un aparato de control de un vehículo operativo autónomo sin personal según una realización de la invención.
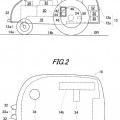
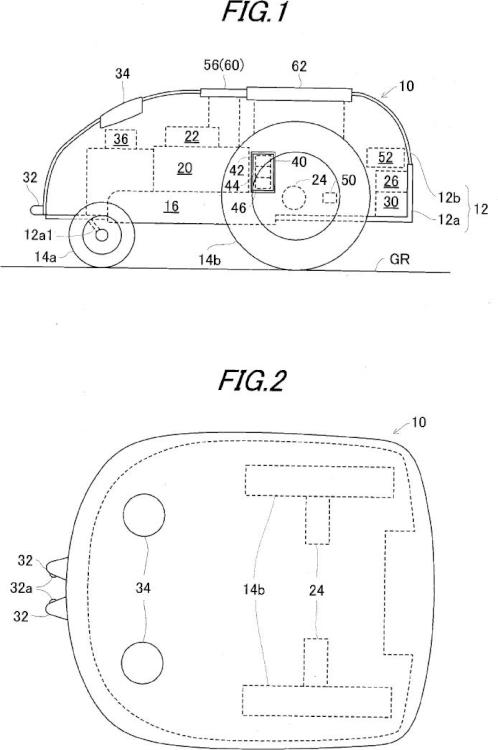
La figura 2 es una vista en planta del vehículo representado en la figura 1.
La figura 3 es un diagrama de bloques que representa la entrada y salida de dispositivos montados en el vehículo representado en la figura 1.
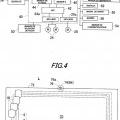
La figura 4 es una vista en planta que representa una zona operativa donde el vehículo representado en la figura 1
ha de moverse.
La figura 5 es un diagrama de bloques que representa la configuración de la estación de carga (estación) representada en la figura 4.
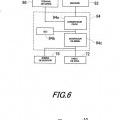
La figura 6 es una vista explicativa que representa un proceso de carga en la estación de carga representada en la figura 5.
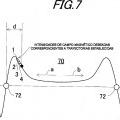
La figura 7 es una vista explicativa que representa un campo magnético de un cable de zona incrustado en la zona operativa representado en la figura 4.
Y la figura 8 es un diagrama de flujo que representa la operación del aparato representado en la figura 1. Descripción de la realización
Un aparato de control de un vehículo operativo autónomo sin personal según una realización de la presente Invención se explicará ahora con referencia a los dibujos adjuntos.
La figura 1 es una vista lateral de un aparato de control de un vehículo operativo autónomo sin personal según una realización de la invención, la figura 2 es una vista en planta del vehículo representado en la figura 1, la figura 3 es un diagrama de bloques que representa la entrada y salida de dispositivos montados en el vehículo representado en la figura 1 y la figura 4 es una vista en planta que representa una zona operativa donde el vehículo representado en la figura 1 ha de moverse.
Como se representa en las figuras 1 y 2, el símbolo 10 Indica un vehículo operativo autónomo sin personal. El vehículo 10 tiene una carrocería de vehículo 12 y ruedas 14. El cuerpo 12 incluye un chasis 12a y un bastidor 12b montado en el chasis 12a, mientras que las ruedas 14 incluyen ruedas delanteras derecha e Izquierda 14a de un diámetro relativamente pequeño que están fijadas en la parte delantera del chasis 12a a través de un soporte 12a1, y ruedas traseras derecha e izquierda 14b de un diámetro relativamente grande que van montadas directamente en el chasis 12a.
Unas cuchillas (cuchillas rotativas; máquina operativa) 16 para cortar césped están montadas en el centro, más o menos, del chasis 12a, y un motor eléctrico (a continuación llamado el "motor operativo") 20 está instalado encima de las cuchillas 16. Las cuchillas 16 están conectadas al motor operativo 20 que las hará moverse y girar.
Las cuchillas 16 también están conectadas a un mecanismo de regulación de altura de cuchillas 22 que el operador (usuario) manipulará manualmente. El mecanismo de regulación de altura de cuchillas 22 está equipado con un tornillo (no representado) que el operador girará manualmente para regular la altura de las cuchillas 16 con respecto a la tierra de contacto GR.
Dos motores eléctricos (impulsores principales; a continuación llamados los "motores de movimiento") 24 están montados en el chasis 12a del vehículo 10 detrás de las cuchillas 16. Los motores de movimiento 24 están conectados a las ruedas traseras derecha e Izquierda 14b para moverlas de modo que las ruedas traseras 14b giren en la dirección normal (marcha hacia delante) o en la dirección Inversa (marcha hacia atrás) independientemente una de otra para hacer que el vehículo 10 se mueva en el suelo GR. En otros términos, las ruedas delanteras 14a sirven como las ruedas libres mientras que las ruedas traseras 14b sirven como las ruedas movidas. Las cuchillas 16, el motor operativo 20, los motores de movimiento 24, etc, están cubiertos por el bastidor 12b.
Una unidad de carga (incluyendo un convertidor CA/CC) 26 y una batería 30 están alojados en la parte trasera del vehículo 10 y dos terminales de carga 32 están montados en la parte delantera del vehículo 10 en el bastidor 12b sobresaliendo hacia delante. Cada uno de los terminales 32 tiene un punto de contacto 32a en un lado que mira al otro punto de contacto 32a.
Los terminales 32 están conectados a la unidad de carga 26 a través de cableado y la unidad de carga 26 está conectada a la batería 30 a través de cableado. Los motores operativos y de movimiento 20, 24 están conectados a la batería 30 a través de cableado para recibir potencia de ella. El cableado no se ilustra en las figuras 1 y 2.
Así, el vehículo 10 está formado como un vehículo operativo eléctrico autónomo de cuatro ruedas, sin personal, (vehículo cortacésped) que mide, por ejemplo, aproximadamente 600 milímetros de largo, 300 milímetros de ancho y 300 milímetros de alto.
Un extremo delantero del vehículo 10 está provisto de dos sensores magnéticos, es decir, derecho e izquierdo (detector de magnetismo) 34. El bastidor 12b está provisto de un sensor de contacto 36. Cuando el bastidor 12b se levanta del chasis 12a al topar con un obstáculo y análogos, el sensor de contacto 36 envía una señal de encendido.
... [Seguir leyendo]
Reivindicaciones:
1. Un aparato incluyendo un vehículo operativo autónomo sin personal (10) que tiene un motor eléctrico (20) al que se le suministra potencia desde una batería (30) para operar una máquina operativa (16), impulsores principales (24) para mover ruedas (14), y sensores magnéticos (34) para detectar la intensidad de un campo magnético de un cable de zona (72) del aparato, estando adaptado el aparato para controlar el vehículo para que se mueva en una zona operativa (70) definida por el cable de zona a través de ruedas movidas por los impulsores principales para realizar una operación usando la máquina operativa y para volver a un dispositivo de carga (74, 84) instalado en el cable de zona con el fin de cargar la batería,
donde el aparato incluye además:
un detector de distancia de cable de zona (42, S10-S24) adaptado para detectar la distancia del cable de zona en base a la intensidad detectada del campo magnético detectado por los sensores magnéticos; y
un selector de trayectoria de retorno (42, S28-S40) adaptado para seleccionar una trayectoria diferente de una pluralidad de trayectorias de retorno que están predefinidas a lo largo del cable de zona con respectivas distancias del cable de zona (72), siempre que el vehículo tenga que volver al dispositivo de carga instalado en el cable de zona para cargar la batería,
caracterizado porque el selector de trayectoria de retorno cambia alternativamente una dirección de entrada del vehículo (10) al dispositivo de carga (74, 84) entre hacia la derecha y hacia la izquierda en la zona operativa (70) siempre que el vehículo tenga que volver (S14-S18) al dispositivo de carga (74, 84).
2. El aparato según la reivindicación 1, donde las trayectorias de retorno se establecen de modo que sean diferentes de las distancias del cable de zona y una de las trayectorias de retorno se selecciona de tal manera que la distancia desde el cable de zona aumente siempre que el vehículo tenga que volver (S36-S40).
3. El aparato según la reivindicación 1 o 2, donde el dispositivo de carga está provisto de una bobina (76) que irradia un campo magnético que forma una zona de detección de dispositivo de carga alrededor del dispositivo de carga.
4. El aparato según cualquiera de las reivindicaciones 1 a 3, donde el selector de trayectoria de retorno selecciona una de las trayectorias colocadas en el lado interior cuando el vehículo ha salido de la zona operativa durante la vuelta al dispositivo de carga.
5. El aparato según cualquiera de las reivindicaciones 1 a 4, donde los impulsores principales (24) incluyen motores eléctricos que reciben potencia de la batería.
6. El aparato según cualquiera de las reivindicaciones 1 a 5, donde la máquina operativa (10) incluye un cortacésped.
7. Un método para controlar un vehículo operativo autónomo sin personal (10) que tiene un motor eléctrico (20) que recibe potencia de una batería (30) para operar una máquina operativa (16), impulsores principales (24) para mover ruedas (14), y sensores magnéticos (34) para detectar la intensidad de un campo magnético de un cable de zona (72), siendo controlado el vehículo para que se mueva en una zona operativa (70) definida por el cable de zona a través de ruedas movidas por los impulsores principales para realizar una operación usando la máquina operativa y para volver a un dispositivo de carga (74, 84) instalado en el cable de zona con el fin de cargar la batería,
donde el método Incluye los pasos de:
detectar la distancia desde el cable de zona en base a la intensidad detectada del campo magnético detectado por los sensores magnéticos (42, S10 S24); y
seleccionar una trayectoria diferente de una pluralidad de trayectorias de retorno que están predefinidas a lo largo del cable de zona con respectivas distancias del cable de zona (72), siempre que el vehículo tenga que volver al dispositivo de carga instalado en el cable de zona para cargar la batería (42, S28-S40),
caracterizado porque
el paso de seleccionar la trayectoria de retorno cambia alternativamente una dirección de entrada del vehículo (10) al dispositivo de carga (74, 84) entre hacia la derecha y hacia la Izquierda en la zona operativa (70) siempre que el vehículo tenga que volver (S14-S18) al dispositivo de carga (74, 84).
8. El método según la reivindicación 7, donde las trayectorias de retorno se establecen de modo que sean diferentes de las distancias del cable de zona y una de las trayectorias de retorno se selecciona de tal manera que la distancia del cable de zona aumente siempre que el vehículo tenga que volver (S36-S40).
9. El método según la reivindicación 7 o 8, donde el dispositivo de carga está provisto de una bobina (76) que irradia un campo magnético que forma una zona de detección de dispositivo de carga alrededor del dispositivo de carga.
10. El método según cualquiera de las reivindicaciones 7 a 9, donde el paso de seleccionar la trayectoria de retorno
selecciona una de las trayectorias colocadas en el lado interior cuando el vehículo ha salido de la zona operativa al volver al dispositivo de carga.
11. El método según cualquiera de las reivindicaciones 7 a 10, donde los impulsores principales (24) incluyen 10 motores eléctricos que reciben potencia de la batería.
12. El método según cualquiera de las reivindicaciones 7 a 11, donde la máquina operativa (16) incluye un cortacésped.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]