Sistema y método para probar tecnologías de prevención de accidentes.
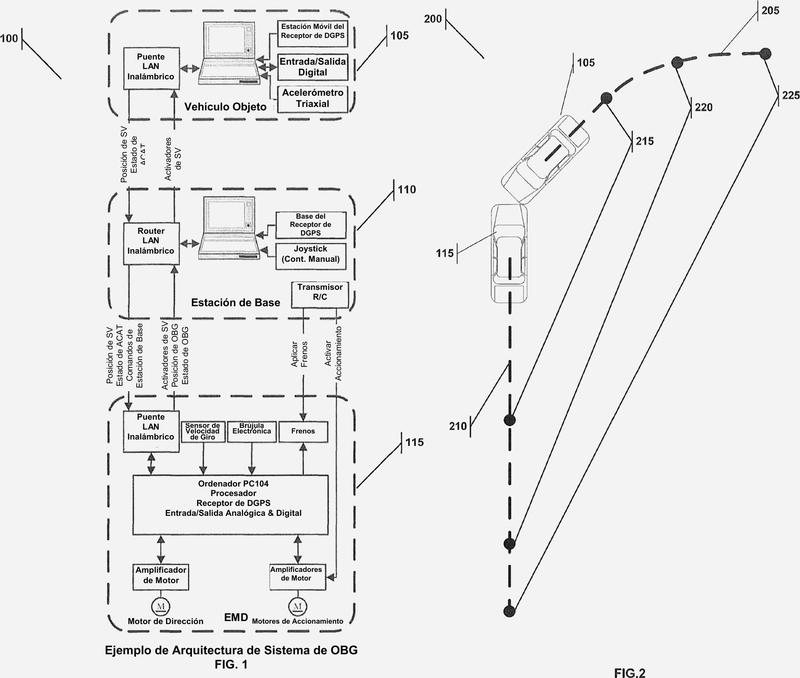
Un sistema de Objetivo Blando Guiado (OBG) que comprende:
un vehículo objeto (VO) (105) con un sensor de posición de VO y un sensor de velocidad de VO;
un elemento de movimiento dinámico (EMD) (115) con un sensor de posición de EMD en que el EMD (105) comprende un cuerpo que comprende una superficie superior en que la superficie superior está adaptada para soportar un cuerpo blando que tiene el tamaño y la forma de un vehículo o de una parte de un vehículo, en que el cuerpo tiene al menos un lado cónico de manera que permite que el vehículo objeto avanzar hasta y sobre la superficie superior con un daño mínimo o ningún daño al vehículo objeto (105) ni al EMD (115), en que el cuerpo está soportado además por una pluralidad de ruedas; un procesador que está conectado a una memoria, al DME (115) y al VO (105), en que el procesador está configurado para determinar una posición del VO desde el sensor de posición del VO (305) y una posición del EMD desde el sensor de posición del EMD (310);
un controlador de velocidad conectado a un motor que impulsa una rueda y que recibe instrucciones de control desde el procesador;
un archivo de trayectoria del VO (325) que representa la trayectoria del VO y que está almacenado en la memoria, un archivo de trayectoria del EMD (315) que representa la trayectoria del EMD y que está almacenado en la memoria, caracterizado porque el archivo de trayectoria del VO (325) comprende un conjunto de puntos de referencia del VO y un conjunto de velocidades del VO, de manera que las velocidades del VO son asignadas a los puntos de referencia del VO;
el archivo de trayectoria de EMD (315) comprende un conjunto de puntos de referencia del EMD y un conjunto de velocidades del EMD, de manera que las velocidades del EMD son asignadas a los puntos de referencia del EMD, en que cada punto de referencia del EMD con su velocidad de EMD asignada es asignado a un punto de referencia del VO correspondiente con su velocidad de VO asignada en el archivo de trayectoria del VO; y
el procesador está también configurado para realizar los siguientes pasos:
(a) determinar una posición del VO a lo largo de la trayectoria representada por el archivo de trayectoria del VO y determinar el punto de referencia del VO para dicha posición en el archivo de trayectoria del VO (330);
(b) determinar el punto de referencia correspondiente a partir del archivo de trayectoria del EMD (320) que se asigna al punto de referencia del VO en el archivo de trayectoria del VO tal como se calcula en el paso (a);
(c) calcular un error longitudinal (342) de la posición del EMD en forma de una desviación de distancia a lo largo de la trayectoria para un punto de referencia determinado;
(d) calcular una compensación de velocidad basada en el error longitudinal (345);
(e) determinar una relación de velocidad a partir del archivo de trayectoria del VO (325) y el archivo de trayectoria del EMD (315) para el punto de referencia del EMD correspondiente determinado a partir del paso (b);
(f) determinar la velocidad del VO a partir del sensor de velocidad del VO (360);
(g) calcular una nueva velocidad del EMD;
(h) calcular una instrucción de control del EMD; y
(i) enviar la instrucción de control al EMD.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E14181511.
Solicitante: Dynamic Research, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 355 Van Ness Ave. Torrance, CA 90501 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KELLY,JOSEPH, SILBERLING,JORDAN, BROEN,PETER, ZELLNER,JOHN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60T7/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 7/00 Organos de iniciación de la acción de los frenos. › desencadenados por el contacto del vehículo, p. ej. del parachoques, con un obstáculo exterior, p. ej. otro vehículo.
- B60W30/08 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Anticipación o prevención de colisiones probables o inminentes.
- G01M17/007 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 17/00 Ensayos de vehículos (ensayos de estanqueidad G01M 3/00; ensayos de las propiedades elásticas de carcasas o chasis, p. ej. ensayos de torsión G01M 5/00; ensayos de alineación de los dispositivos de iluminación delantera de vehículos G01M 11/06; ensayos de motores G01M 15/00). › Vehículos de ruedas o vehículos oruga (G01M 17/08 tiene prioridad).
- G05D1/02 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
- G08G1/16 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas anticolisión.
PDF original: ES-2573477_T3.pdf
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]