Procedimiento y dispositivo para determinar la posición de un vehículo, programa de ordenador y producto de programa de ordenador.
Procedimiento para determinar la posición de un vehículo, que se mueve a lo largo de una pista (12),
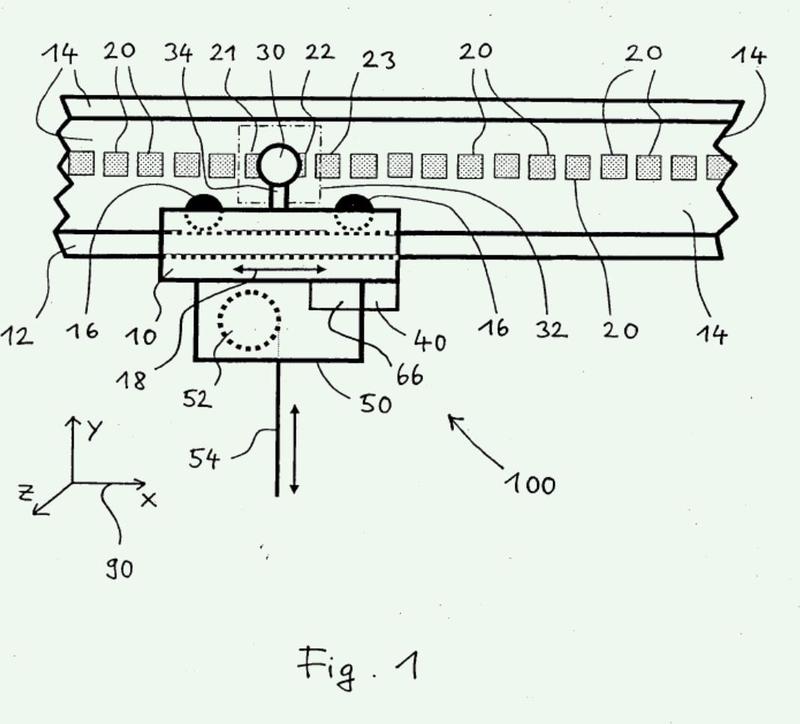
en donde a lo largo de la pista (12) están dispuestos unos marcadores (20), en especial unos soportes de datos o códigos de barras, en donde los marcadores (20) se detectan con una cámara digital (30) dispuesta sobre el vehículo (10), y en donde mediante tratamiento de imágenes a partir de una posición de al menos una imagen de marcador, dentro del margen de detección (32) de la cámara digital (30), se determina una posición relativa del vehículo (10) con relación al respectivo marcador (21, 22, 23) o el marcador respectivo, caracterizado porque en base a los datos de medición de un sensor de aceleración (66) acoplado al vehículo (10) se determina un recorrido (s) cubierto por el vehículo (10) hasta un momento de consulta (t), porque se calcula una posición actual del vehículo (10) teniendo en cuenta una fecha de posición precedente y los recorridos determinados en base a los datos de medición del sensor de aceleración, porque se emite la posición actual del vehículo (10), y porque el sensor de aceleración (66) se calibra mediante la comparación de la última fecha de posición con la posición, que se obtiene de la penúltima fecha de posición y del recorrido, cubierto entre los momentos de toma de la penúltima y de la última fecha de posición y determinado en base a los datos de medición del sensor de aceleración(66).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08005214.
Solicitante: PEPPERL + FUCHS GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Königsberger Allee 87 68307 Mannheim ALEMANIA.
Inventor/es: Hofmann,Hilmar, Opper,Rüdiger, Kirsch,Martin.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B61L25/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61L CONTROL DE TRAFICO FERROVIARIO; SEGURIDAD DEL TRAFICO FERROVIARIO (frenos o equipos auxiliares B61H, B61K; estructura de sistemas de agujas E01B). › B61L 25/00 Registro o indicación de la posición o de la identidad de vehículos o de trenes o de la posición de aparatos de la vía. › Indicación o registro de la posición o de la identidad de vehículos o de trenes.
- B66C13/16 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Utilización de dispositivos indicadores de posicionado o de pesada (en los ganchos de grúa B66C 1/40; en los mecanismos de seguridad B66C 15/00; aparatos de pesada G01G; sistemas indicadores a distancia en general G08).
- B66C13/46 B66C 13/00 […] › Indicadores de posición para cargas suspendidas o para elementos de grúas.
- G01D5/249 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › utilizando código de pulsos.
- G01D5/26 G01D 5/00 […] › que utilizan medios ópticos, p. ej. que utilizan luz infrarroja, visible o ultravioleta.
- G01D5/347 G01D 5/00 […] › que utilizan escalas de codificación de desplazamiento.
- G05D1/02 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2556174_T3.pdf
Patentes similares o relacionadas:
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]