CIP-2021 : B25J 17/02 : Uniones articuladas.
CIP-2021 › B › B25 › B25J › B25J 17/00 › B25J 17/02[1] › Uniones articuladas.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 17/00 Uniones.
B25J 17/02 · Uniones articuladas.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA DE DESPLAZAMIENTO.
(16/04/2013) El sistema de desplazamiento se basa en una esfera para conseguir un equilibrio estable, apoyando sobre esa esfera unas ruedas accionadas por respectivos actuadores pertenecientes al cuerpo de un robot , todo ello de manera que mediante un control apropiado basado en un procesador , el robot permanece en equilibrio sobre la esfera sin desplazamiento de aquel. El sistema de traslación propiamente dicho está previsto para su aplicación en robots de estabilidad dinámica, lo que permite sortear obstáculos tales como escaleras, cruzar o atravesar pilas de escombros u otros obstáculos, e incluso diseñar el cuerpo del robot de forma estrecha o humanoide para poder trabajar en zonas estrechas.
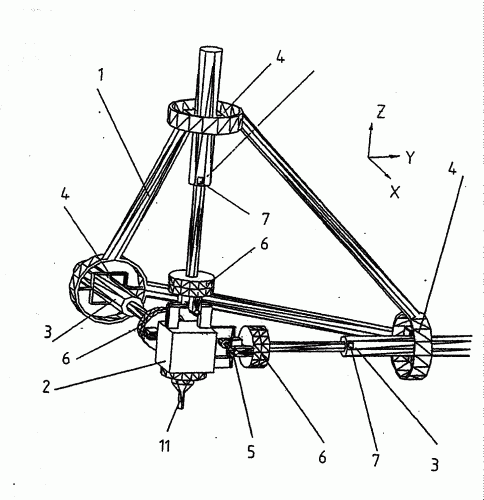
Robot delta para aumetnar los requisitos en cuanto a dinámica, higiene y protección frente a las consecuencias de una colisión.
(02/01/2013) Robot delta destinado al aumento de los requisitos en cuanto a dinámica, higiene y protección frente a las consecuencias de una colisión, que comprende -un alojamiento estacionario , en el que -se instalan al menos tres propulsores y -sobre el cual al menos tres brazos superiores alargados -están montados cada uno para girar alrededor de un eje y
-se conectan en cada caso a uno de los propulsores y -están conectados en cada caso, en sus extremos libres, a un par de brazos inferiores alargados y paralelos entre sí a través de una articulación esférica ,
-que en su otro extremo están conectados en cada caso a través de una adicional a -una placa paralela móvil , sabiendo -estando fijada una cabeza esférica o una rótula a ambos…
MECANISMO Y MODULO ARTICULADO.
(14/09/2012) Mecanismo y módulo articulado.
Se describen un mecanismo y un módulo de posicionamiento que permite alcanzar una posición y orientación determinada del plano móvil respecto al extremo de referencia fijo (plano fijo). Este módulo mecánico puede utilizarse en aquellas aplicaciones en las que sea necesario mover o posicionar materiales, herramientas de manufactura, mantenimiento o de control o inspección, etc., mediante el acoplamiento a uno de sus planos de la herramienta adecuada para la relación de la tarea.
(14/09/2012) El robot tensegrítico objeto de la invención permite el movimiento controlado y adaptar su tamaño a diversos espacios, gracias a su configuración basada en una estructura tensegrítica actuada mediante motores controlador por medios electrónicos y de control que determinan la longitud de los elementos controlables de la estructura.
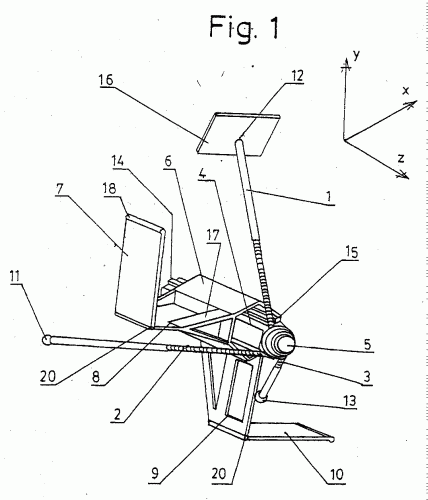
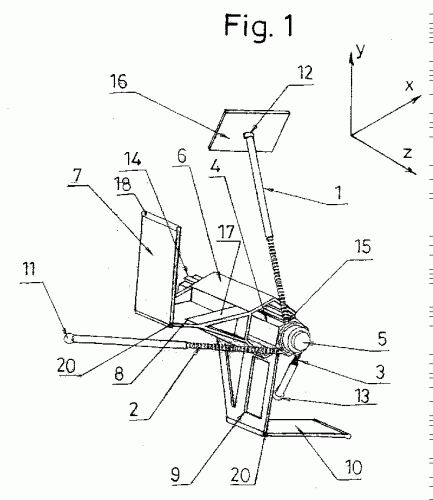
Robot con cinemática Delta.
(10/07/2012) Robot con dinámica Delta, cuyos soporte para herramientas y base del robot están unidos por undispositivo de longitud y ángulo variables para la transmisión del par de giro, que puede ser accionado a travésde la Base del robot y con el que puede ser girada una herramienta montada en el soporte paraherramientas, caracterizado porque el dispositivo para la transmisión del par de giro comprende un tubo rígido aflexión, accionable en rotación y desplazable con relación a la base del robot, que por medio de un apoyoCardan está montado en la base del robot y que está acoplado con un engranaje con eje hueco montadosobre un anillo Cardan interior del apoyo Cardan.
Árbol telescópico para un robot industrial de acuerdo con el concepto delta.
(16/05/2012) Un árbol telescópico para uso en un robot de acuerdo con el concepto delta, teniendo el árboltelescópico extremos opuestos para conectarlos a una sección de base y a una placa móvil de dichorobot, cuando el árbol telescópico está montado en el robot, comprendiendo el árbol telescópico un brazo tubularexterior que lleva una primera unión de extremo y un brazo interior coaxial deslizable dentro del brazotubular exterior y que lleva una segunda unión de extremo , estando dicho árbol telescópico adaptado paratransmitir un par torsor de uno a otro de dicho brazo interior y brazo exterior, y en el que
- dicho brazo tubular exterior tiene una sección transversal poligonal;
-…
ROBOT CON ANILLOS DE SOPORTE FIJADOS SOBRE UNA CAJA DE ENGRANAJES PARA FIJACION DE LEVAS DE CONTROL.
(16/06/2007). Solicitante/s: KUKA ROBOTER GMBH. Inventor/es: KARLINGER, STEFAN.
Robot de varios ejes con al menos un engranaje asociado a un eje del robot, con una caja de engranajes con bandas de retención para fijar levas de control para controlar el ángulo de giro del eje del robot, caracterizado porque las bandas de retención están configuradas esencialmente en forma de arco de circunferencia con un perímetro interior aproximadamente equivalente al perímetro exterior de la caja del engranajes , y porque las bandas de retención se pueden tensar entre sí por el lado frontal para su fijación a la caja de engranajes.
ARTICULACION GIRATORIA DE ALTA RIGIDEZ AXIAL.
(01/04/2007). Solicitante/s: MTS SYSTEMS CORPORATION. Inventor/es: BUSHEY, JOHN, A.
Una articulación giratoria que comprende: un primer miembro base (30A); un segundo miembro base (32A); una araña que comprende: una primera y una segunda superficies arqueadas adaptadas para formar articulaciones con el primer (30A) y segundo (32A) miembros base, respectivamente; primer (40A) y segundo (40B) vástagos opuestos uno a otro; tercer (42A) y cuarto (42B) vástagos opuestos uno a otro; un primer mecanismo (30B, 30C, 30D) acoplado al primer (40A) y segundo (40B) vástagos de la araña y al primer miembro base y adaptado para ejercer una fuerza de compresión para tirar del primer miembro base (30A) hacia la primera superficie arqueada ; y un segundo mecanismo (32B, 32C, 32D) acoplado al tercer y cuarto vástagos de la araña y al segundo miembro base (32A) y adaptado para ejercer una fuerza de compresión para tirar del segundo miembro base (32A) hacia la segunda superficie arqueada.
SISTEMA CINEMATICO PARA CABEZAL DE MAQUINA.
(16/02/2007). Ver ilustración. Solicitante/s: FUNDACION FATRONIK. Inventor/es: SAENZ FERNANDEZ,AGUSTIN J., COLLADO GIMENEZ,VALENTIN, GIMENEZ OLAZABAL,MARTA.
Sistema cinemático para cabezal de máquina, que consta de una primera plataforma a la que se fijan tres guías de deslizamiento con su deslizadera correspondiente, tres pares de brazos, uniéndose cada brazo por un extremo mediante una junta esférica a una segunda plataforma cabezal y por el otro extremo mediante una junta esférica a una de dichas deslizaderas, uniéndose cada par de brazos a la misma deslizadera en el mismo punto/zona. De aplicación en máquina herramienta.
(16/09/2006). Ver ilustración. Solicitante/s: ABB AB. Inventor/es: PERSSON, FREDRIK, MIKAELSSON, PIERRE, HVITTFELDT, H KAN, LARSSON, JAN.
Dispositivo de robot que incluye por lo menos un dispositivo de enlace en el que las varillas de freno están dispuestas en un sistema de juntas múltiples donde las juntas incluyen juntas de rótula y casquillo de tres ejes que comprenden un casquillo que encierra una rótula con un espacio que comprende la mitad de una esfera ó menos caracterizado por el hecho de que el cojinete radial de bolas está sujeto para que no gire dentro de la carcasa en el casquillo de la junta y donde la carcasa incluye una superficie en cuya proximidad está situado el cojinete radial de bolas y que la superficie está diseñada con medios que aumentan la fricción.
MAQUINA-HERRAMIENTA CON HUSILLO DESPLAZABLE MONTADO SOBRE UNA UNIDAD DE TRIPODE.
(01/08/2006) Máquina herramienta para el mecanizado con arranque de viruta de piezas de gran superficie colocadas en posición vertical, con - un montante desplazable que se puede desplazar a lo largo de un primer eje de coordenadas sobre una bancada longitudinal , - una unidad de mecanizado desplazable en el montante móvil a lo largo de por lo menos otros dos ejes de coordenadas, con un husillo de trabajo orientable , y - por lo menos un portapiezas que tiene aproximadamente forma de placa y que se puede girar desde una posición horizontal de preparación a una posición vertical de mecanizado, caracterizada porque - la unidad de mecanizado es una unidad de trípode con un tubo portante central…
MAQUINA DE REVESTIMIENTO CON UN PULVERIZADOR Y UNA ARTICULACION GIRATORIA.
(16/10/2005). Ver ilustración. Solicitante/s: DURR SYSTEMS GMBH. Inventor/es: HERRE, FRANK, HEZEL, THOMAS, HAAS, JURGEN.
Máquina de revestimiento para el revestimiento en serie electrostático de piezas de trabajo con un pulverizador el cual para la carga del material de revestimiento rociado por él está conectado a una conducción de alta tensión , y con una articulación giratoria que conecta el pulverizador con un brazo de máquina móvil, cuyos elementos pueden ser girados relativamente unos respecto de los otros por un mecanismo de accionamiento que se encuentra en la articulación y que forman un espacio hueco para las conducciones que conducen al pulverizador, caracterizada porque entre el pulverizador y el brazo de máquina se extiende, a lo largo de la articulación giratoria , una envoltura aislante para la alta tensión del pulverizador, la cual presenta, en función de los elementos de la articulación giratoria que pueden ser girados relativamente unos respecto de los otros, unas secciones que giran unas con respecto a las otras.
DISPOSITIVO DE DESPLAZAMIENTO Y/O DE POSICIONAMIENTO DE UN OBJETO SEGUN CINCO EJES.
(16/09/2005). Ver ilustración. Solicitante/s: METROM MECHATRONISCHE MASCHINEN GMBH FRAUNHOFER-GESELLSCHAFT ZUR FIRDERUNG DER ANGEWANDTEN FORSCHUNG E.V. Inventor/es: SCHWAAR, CLAUDIA, NEUGEBAUER, REIMUND, SCHWAAR, MICHAEL.
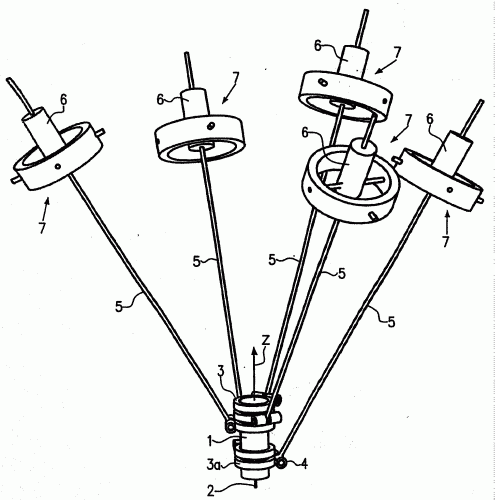
Dispositivo de movimiento y/o de posicionamiento para el movimiento y/o posicionamiento en cinco ejes de un objeto , con un portaobjetos y cinco elementos de acoplamiento que soportan el portaobjetos en un bastidor donde cuatro de los cinco elementos de acoplamiento están unidos al portaobjetos, respectivamente, mediante un primer conjunto articulado (3, 4 u 8) con respectivamente dos grados de libertad, y el correspondiente otro de los cinco elementos de acoplamiento lo está mediante un segundo conjunto articulado (3a, 4), con un solo grado de libertad.
SISTEMA CINEMATICO PARA CABEZAL DE MAQUINA.
(16/07/2005). Ver ilustración. Solicitante/s: FUNDACION FATRONIK. Inventor/es: SAENZ FERNANDEZ,AGUSTIN J., COLLADO GIMENEZ,VALENTIN, GIMENEZ OLAZABAL,MARTA.
Sistema cinemático para cabezal de máquina, que consta de una primera plataforma movible según los ejes OX, OY, tres o cuatro brazos de longitud variable que se unen por un extremo mediante juntas a la primera plataforma y por su otro extremo mediante juntas a una segunda plataforma o cabezal, y disponiendo en una estructura, sin movimiento relativo respecto a la primera plataforma, un conjunto guía/deslizadera, según el eje OZ, uniéndose rígidamente a la deslizadera una junta de rotación que a su vez se une a la segunda plataforma, teniendo la junta de rotación dos o tres grados de libertad según se utilicen tres o cuatro brazos respectivamente. De aplicación en máquina herramienta.
MAQUINA HERRAMIENTA, PARTICULARMENTE CON ARQUITECTURA PARALELA, QUE ADOPTA ARTICULACIONES DE DEFORMACION.
(16/05/2005) Maquina herramienta (M) de mecanizado a gran velocidad del tipo constituido por una estructura paralela que incluye barras de enlace , cuya primera extremidad esta unida a un órgano móvil que asegura el soporte de al menos una herramienta, y cuya segunda extremidad esta unida a al menos un medio de puesta en movimiento respecto a un bastidor (B), dichas barras estando equipadas en sus extremidades con enlaces que permiten una rotación según al menos dos ejes, caracterizada por el hecho de que los enlaces en las extremidades (110 y 120) de dichas barras estan constituidos por una asociación de pivotes ficticios …
SISTEMA CINEMATICO PARA CABEZAL DE MAQUINA.
(16/03/2005). Solicitante/s: FUNDACION FATRONIK. Inventor/es: SAENZ FERNANDEZ,AGUSTIN J., GIMENEZ OLAZABAL,MARTA, COLLADO JIMENEZ, VALENTIN.
Sistema cinemático para cabezal de máquina, que consta de: a) una primera plataforma a la que se fijan b) tres guías de deslizamiento con su deslizadera correspondiente, c) tres pares de brazos , que tienen una longitud constante, uniéndose cada brazo por un extremo mediante una junta esférica a una segunda plataforma cabezal y por el otro extremo mediante una junta esférica a una de dichas deslizaderas, uniéndose cada par de brazos a la misma deslizadera, caracterizado porque d) los seis brazos no tienen todos la misma longitud.
ESTRUCTURA DE BRAZO PARA ROBOTS DE TRABAJO DE TIPO HUMANO.
(16/09/2004) Una estructura de brazo para un robot antropomórfico que comprende un montaje de articulación de hombro que tiene una primera articulación acoplada a un torso para girar solamente alrededor de un primer eje , una segunda articulación acoplada a la primera articulación para girar solamente alrededor de un segundo eje , transversal al primer eje, y una tercera articulación acoplada a la segunda articulación para girar solamente alrededor de un tercer eje , transversal al segundo eje, intersectando los ejes, primero a tercero, en un punto único, y un montaje de articulación de codo acoplado a la tercera articulación del montaje de articulación de hombro, caracterizada porque la posición y postura de las articulaciones primera a tercera de dicho montaje de articulación de hombro y la posición de dicho montaje de articulación de codo con respecto…
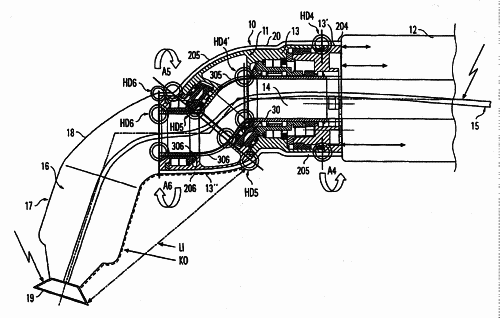
(01/07/2004) Un robot industrial que comprende un brazo superior que puede girar alrededor de un primer eje (A), una muñeca soportada por el brazo superior que puede girar alrededor de un segundo eje (B), un dispositivo de giro hueco , soportado por la muñeca que puede girar alrededor de un tercer eje (C), que en su extremo delantero comprende un disco de giro para conexión de una herramienta, al menos una línea de suministro (K) que se extiende a lo largo del brazo superior, caracterizado porque el dispositivo de giro comprende una sección de collar , con una superficie de envoltura cónica , fijada al disco de giro , a través de dicha superficie de envoltura cónica está dispuesta al menos…
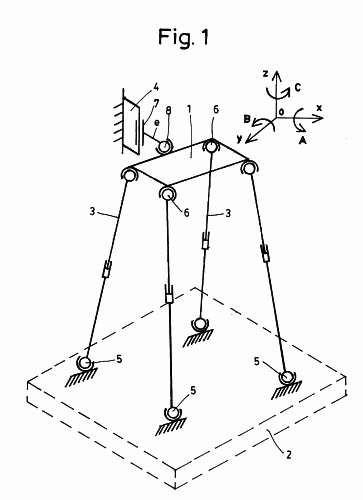
MANIPULADOR PARALELO PROVISTO DE UN MECANISMO PASICO DE GUIA.
(01/06/2004). Ver ilustración. Solicitante/s: FATRONIK SYSTEM, S.A. Inventor/es: SAENZ FERNANDEZ,AGUSTIN J., COLLADO JIMENEZ, VALENTIN.
Módulo con movimiento cinemático paralelo de ejes ortogonales, consta de: a) una estructura fija ; b) una estructura pasiva que consta de, al menos, una tijera cinemática , con una unión por un extremo a la estructura fija y, por el otro extremo, con una unión a una estructura móvil plana , siendo articulada una de dichas uniones; c) una estructura móvil espacial portadora del cabezal de trabajo y que puede desplazarse linealmente respecto a la estructura móvil plana; d) unos brazos con una unión por un extremo a la estructura fija y, por el otro extremo, con una unión a la estructura móvil espacial , siendo una de las uniones de dos grados de libertad y la otra unión de tres grados de libertad; e) medios para accionar el movimiento de los brazos.
DISPOSITIVO, ESPECIALMENTE PARA LA COLOCACION Y/O UNION O SEPARACION DE COMPONENTES.
(01/06/2004). Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: KAESSER, RAINER.
Disposición especial para situar y/o unir o separar componentes, desarrollada para que tenga un peso reducido, utilizando un procedimiento de construcción compacta. La disposición especial para situar y/o unir o separar componentes, utilizando vibraciones, tiene una base con un primer dispositivo de vibración montado en la base y oscilando en una primera dirección longitudinal, transversal a una dirección de trabajo, un segundo dispositivo de vibración montado sobre el primero y oscilando en una segunda dirección longitudinal transversal a la dirección de trabajo y a la primera dirección longitudinal, y un dispositivo giratorio que conduce giratoriamente a un dispositivo de agarre. El dispositivo giratorio está montado sobre el segundo dispositivo de vibración, preferentemente mediante una conexión por pestaña. También se incluye una reivindicación independiente para una estación de procesado.
DISPOSITIVO DE MONTAJE DE TRIPODE Y METODO DE COMPENSACION DE TORSION.
(01/01/2004). Ver ilustración. Solicitante/s: FRAUNHOFER-GESELLSCHAFT ZUR FIRDERUNG DER ANGEWANDTEN FORSCHUNG E.V.. Inventor/es: NEUGEBAUER, REIMUND, SCHWAAR, MICHAEL, KIRCHNER, JAN.
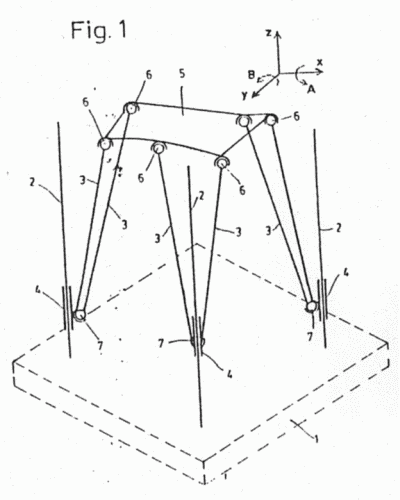
Dispositivo de posicionamiento trípode con un armazón fijo y un portador móvil respecto a aquél, que están unidos entre sí por medio de tres tirantes ajustables en longitud, estando acoplado cara tirante al armazón y al portador mediante al menos una articulación , caracterizado porque cada tirante está acoplado al armazón y al portador mediante sendas articulaciones que presentan dos grados de libertad de giro y estando previsto un dispositivo regulador de la compensación de la torsión que actúa conjuntamente con los accionamientos de torsión asignados respectivamente a los distintos tirantes , para girar la articulación del lado del portador, del tirante respectivo, con relación a la articulación del lado del armazón de ese mismo tirante, alrededor de su eje longitudinal, con el fin de regular las torsiones que surjan en los tirantes.
MODULO CON MOVIMIENTO CINEMATICO PARALELO DE EJES ORTOGONALES.
(16/12/2003). Ver ilustración. Solicitante/s: FUNDACION FATRONIK. Inventor/es: SAENZ FERNANDEZ,AGUSTIN J., COLLADO JIMENEZ, VALENTIN.
Módulo con movimiento cinemático paralelo de ejes ortogonales que consta de una estructura fija o bancada, una estructura pasiva con, al menos, una tijera cinemática unida por uno de sus extremos a la estructura fija y por el otro extremo a una estructura móvil plana, siendo articulada una de dichas uniones; y una estructura móvil espacial portadora del cabezal de trabajo y que puede desplazarse linealmente respecto a la estructura móvil plana; y unos brazos con una unión por un extremo a la estructura fija y por el otro extremo con una unión a la estructura móvil espacial, siendo una de las uniones de dos grados de libertad y la otra unión de tres grados de libertad; y medios para accionar el movimiento de los brazos. De aplicación en máquinas herramientas.
DISPOSITIVO PARA EL MOVIMIENTO DE UN CUERPO EN EL ESPACIO.
(01/11/2002). Solicitante/s: VEREIN DEUTSCHER WERKZEUGMASCHINENFABRIKEN E.V. (VDW). Inventor/es: PRITSCHOW, GUNTER, PROF.-DR.ING.DR.H.C., WURST, KARL-HEINZ, DR.-ING.
EL DISPOSITIVO SIRVE PARA EL MOVIMIENTO DE UN CUERPO (K) EN FORMA DE BARRA EN EL ESPACIO, ESTANDO UNIDO DE FORMA ARTICULADA CON BRAZOS (VA) DE UNION. TIENEN RESPECTIVAMENTE AL MENOS DOS GRADOS DE LIBERTAD Y ESTAN PREVISTOS DE FORMA RESPECTIVA CON AL MENOS UN ACCIONAMIENTO (A) PARA CONTROL DE UN GRADO DE LIBERTAD ACTIVO. UNO DE LOS PUNTOS (P) EXTREMOS DEL CUERPO (K) DE BARRA DETERMINA LA POSICION EN EL ESPACIO Y EL OTRO PUNTO (P') EXTREMO EN UNION CON EL PRIMER PUNTO (P) EXTREMO DETERMINA LA ORIENTACION DEL CUERPO DE BARRA. PARA EL AJUSTE DE AMBOS PUNTOS (P,P') EXTREMOS SIRVEN LOS BRAZOS (VA) DE UNION.
DISPOSITIVO DE MUÑON PARA ROBOTS INDUSTRIALES.
(01/03/2002) UN DISPOSITIVO DE ARTICULACION PARA ROBOTS INDUSTRIALES, CONSTA DE UN PRIMER, SEGUNDO Y TERCER TUBOS DE IMPULSION DISPUESTOS CONCENTRICAMENTE EN ESTE ORDEN DESDE EL EXTERIOR DENTRO DE UN BRAZO DEL EJE FINAL DE UN ROBOT INDUSTRIAL, UN PASAJE CONTINUAMENTE FORMADO POR LOS HUECOS DE UNA PRIMERA PIEZA DE ARTICULACION , UNA SEGUNDA PIEZA DE ARTICULACION Y UNA PIEZA DE SOPORTE DE HERRAMIENTAS , EL PASAJE SE EXTIENDE DESDE EL TERCER TUBO DE IMPULSION A UNA SUPERFICIE FRONTAL DE LA PIEZA DE SOPORTE DE HERRAMIENTAS Y ESTANDO ABIERTO EN LA SUPERFICIE FRONTAL, Y UN ELEMENTO PROTECTOR CUYOS AMBOS EXTREMOS (50A, 50B) ESTAN FIJADOS DE FORMA SELLADA AL TERCER TUBO DE IMPULSION Y A LA PIEZA DE SOPORTE DE HERRAMIENTAS…
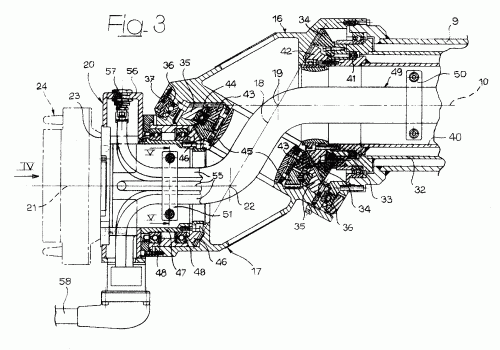
(01/02/2001). Ver ilustración. Solicitante/s: COMAU S.P.A.. Inventor/es: FIORA, ALDO.
LA INVENCION SE REFIERE A UNA ARTICULACION PARA UN ROBOT INDUSTRIAL QUE COMPRENDE TRES ELEMENTOS SUSTENTADOS GIRATORIAMENTE EN TORNO A EJES DE ROTACION RESPECTIVOS , COPLANARES E INCLINADOS MUTUAMENTE, QUE DEJAN UN ESPACIO LIBRE EN SU INTERIOR PARA EL PASO DE CABLES DE ALIMENTACION QUE HAN DE CONECTARSE A LA HERRAMIENTA FIJADA A LA ARTICULACION ROBOTICA. ESTA ULTIMA TIENE UNA BRIDA FRONTAL PARA ACOPLAR LA HERRAMIENTA Y VARIAS SALIDAS RADIALES PARA LOS CITADOS CABLES DE ALIMENTACION , A FIN DE PERMITIR EL USO DE UNA BRIDA DE ACOPLAMIENTO DE HERRAMIENTAS DE ESTRUCTURA SIMPLIFICADA.
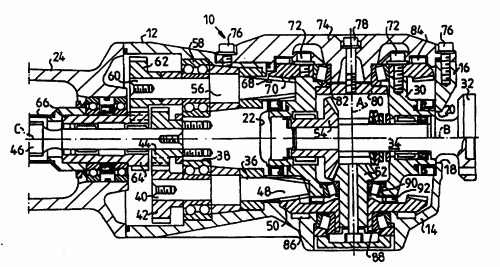
UNIDAD DE MUÑECA PARA ROBOT INDUSTRIAL.
(01/12/1999). Ver ilustración. Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: LARSSON, JAN, DANIELSSON, STEFAN, GEPERTZ, JAN.
LA INVENCION SE REFIERE A UNA UNIDAD ARTICULADA PARA UN ROBOT INDUSTRIAL QUE CONSTA DE UN ALOJAMIENTO DE LA UNIDAD ARTICULADA DISEÑADO PARA QUEDAR FIJADO DE FORMA DESMONTABLE AL EXTREMO DISTAL DEL BRAZO DE UN ROBOT . EL ALOJAMIENTO DE LA UNIDAD ARTICULADA , QUE TIENE DOS BRAZOS DE HORQUILLA , SOPORTA UN ALOJAMIENTO DE INCLINABLE MONTADO DE FORMA PIVOTANTE , QUE A SU VEZ SOPORTA UN PLATAFORMA GIRATORIA MONTADA DE FORMA ROTATIVA SOBRE LA QUE SE PUEDE MONTAR UN ELEMENTO EXTERNO. EL ALOJAMIENTO INCLINABLE SE ENCUENTRA CONFINADO DE FORMA POSITIVA ENTRE EL BRAZO DE HORQUILLA PARA IMPEDIR ASI QUE LAS FUERZAS REACTIVAS DERIVADAS DE LOS ENGRANAJES PRESENTES EN EL ALOJAMIENTO FUERCEN A LOS BRAZOS DE HORQUILLA A SEPARARSE.
ROBOTS DE TRANSPORTE Y POSICIONAMIENTO.
(16/05/1999) UN ROBOT TIENE UN BRAZO DE TRABAJO QUE LLEVA UNA BASE QUE ELLA MISMA LLEVA UNAS BARRAS DE SOPORTE Y UNAS VENTOSAS DE SUCCION . PARA MEJORAR EL POSICIONAMIENTO DE UN OBJETO TRANSPORTADO POR EL ROBOT, PUEDE DISPONERSE UN MIEMBRO DE CONEXION GIRATORIO ASI COMO UN PRIMER MIEMBRO Y UN SEGUNDO MIEMBRO . EL SEGUNDO MIEMBRO PUEDE MOVERSE EN UNA PRIMERA DIRECCION CON RELACION AL PRIMER MIEMBRO BAJO EL CONTROL DE UN PRIMER MEDIO DE CONTROL TAL COMO UN CILINDRO , Y LA BASE SE MUEVE CON RELACION AL SEGUNDO MIEMBRO EN UNA SEGUNDA DIRECCION SUBSTANCIALMENTE PERPENDICULAR A LA PRIMERA DIRECCION BAJO EL CONTROL…
UNIDAD DE MUÑON ROBOTICO INDUSTRIAL.
(16/03/1999) LA INVENCION SE REFIERE A UNA UNIDAD ARTICULADA PARA UN ROBOT INDUSTRIAL QUE CONSTA DE UN ALOJAMIENTO DE LA UNIDAD ARTICULADA DISEÑADO PARA QUEDAR FIJADO DE FORMA DESMONTABLE AL EXTREMO DISTAL DEL BRAZO DE UN ROBOT . EN EL ALOJAMIENTO DE LA UNIDAD ARTICULADA HAY MONTADOS DE FORMA ROTATIVA UN PRIMER Y UN SEGUNDO EJES DE ACCIONAMIENTO SECUNDARIOS , PREFERENTEMENTE PARALELOS, SOBRE CUYOS EXTREMOS DE ENTRADA HAY MONTADOS UNOS ENGRANAJES PREFERENTEMENTE CILINDRICOS PARA ACOPLARSE A UN ENGRANAJE DE ACCIONAMIENTO CILINDRICO CORRESPONDIENTE QUE HAY SOBRE UN EJE DE ACCIONAMIENTO PRIMARIO CORRESPONDIENTE DEL BRAZO DEL ROBOT . VISTO DESDE UNA PROYECCION FINAL, LOS ENGRANAJES Y LOS ENGRANAJES DE ACCIONAMIENTO SE ENCUENTRAN COLOCADOS DE TAL MODO QUE UN LINEA IMAGINARIA (L), QUE…
DISPOSITIVO DE INSERCION DE UNA PIEZA CILINDRICA EN UN ESCARIADO.
(16/03/1999). Solicitante/s: RENAULT-AUTOMATION. Inventor/es: THURIER, YVAN.
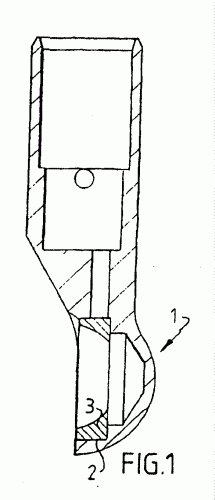
DISPOSITIVO DE INSERCION (39 DE UNA PIEZA CILINDRICA EN UN ESCARIADO QUE COMPRENDE UN SOPORTE PARA UN PORTAPIEZAS QUE TIENE UN EJE PRINCIPAL, COMPRENDIENDO EL PORTAPIEZAS MEDIOS DE SU CONEXION DESLIZANTE EN LA DIRECCION DEL EJE PRINCIPAL CON EL SOPORTE Y MEDIOS DE SUJECION CONTROLADOS DE LA PIEZA CILINDRICA SENSIBLEMENTE COAXIALMENTE AL EJE PRINCIPAL DEL SOPORTE , SIENDO LLEVADO EL SOPORTE POR UN MANIPULADOR CAPAZ DE COLOCAR SU EJE PRINCIPAL CERCA DEL EJE DEL ESCARIADO MIENTRAS QUE SE PREVEN MEDIOS PARA GENERAR UN MOVIMIENTO VIBRATORIO RELATIVO ENTRE EL ESCARIADO Y EL PORTAPIEZAS , COMPRENDIENDO LOS MEDIOS DE CONEXION DEL PORTAPIEZAS AL SOPORTE UNA JUNTA DEL TIPO DE ROTULA Y EN QUE LOS MEDIOS GENERADORES DE VIBRACIONES ESTAN CONSTITUIDOS POR UN DESEQUILIBRIO LLEVADO POR EL PORTAPIEZAS Y MOVILES RESPECTO DEL EJE PRINCIPAL DEL SOPORTE EN UN PLANO SENSIBLEMENTE PERPENDICULAR A ESTE ULTIMO.
HERRAMIENTA ASOCIABLE A UN ROBOT PARA LA INSTALACION AUTOMATICA DE UNA JUNTA DE ESTANQUEIDAD.
(16/10/1998). Solicitante/s: AUTOMOBILES PEUGEOT AUTOMOBILES CITROEN. Inventor/es: PICHOT, BERTRAND.
LA PRESENTE INVENCION SE REFIERE A UNA HERRAMIENTA ASOCIABLE A UN ROBOT PARA LA INSTALACION AUTOMATICA DE UNA JUNTA DE ESTANQUEIDAD. ESTA HERRAMIENTA SE COMPONE ESENCIALMENTE DE UN BASTIDOR DESTINADO A SER FIJADO SOBRE EL PUÑO DE UN ROBOT Y SOBRE EL CUAL ESTA MONTADA ARTICULADA LA PARTE ACTIVA DE LA HERRAMIENTA, QUE COOPERA CON EL BASTIDOR MEDIANTE GATOS NEUMATICOS QUE ASEGURAN LA ADAPTACION FLEXIBLE Y PRECISA DEL MOVIMIENTO DE LA HERRAMIENTA A LA CONFORMACION DE LA JUNTA O DE LA PIEZA QUE RECIBE ESTA JUNTA, A LO LARGO DE LA TRAYECTORIA IMPUESTA A LA HERRAMIENTA POR EL ROBOT. ESTA HERRAMIENTA SE APLICA POR EJMPO A LA INSTALACION AUTOMATICA DE UNA JUNTA DE ENTRADA DE PUERTA DE VEHICULO.
ESTACION DE MONTAJE DE UNA ASIENTO DE VEHICULO EN EL INTERIOR DEL HABITACULO.
(16/11/1997). Solicitante/s: RENAULT-AUTOMATION. Inventor/es: DUPUIS, CLAUDE.
ESTACION DE MONTAJE PARA UN ASIENTO EN EL INTERIOR DEL HABITACULO DE UN VEHICULO , COMPRENDIENDO EL ASIENTO UNA ESTRUCTURA INFERIOR (1A) DE FIJACION A LA CAJA DEL VEHICULO, COMPRENDIENDO LA ESTACION UN EMPLAZAMIENTO DE ESPERA APROVISIONADO CON ASIENTOS POR UN PRIMER TRANSPORTADOR , UN EMPLAZAMIENTO DE REFERENCIA APROVISIONADO CON CAJAS DE VEHICULOS POR UN SEGUNDO TRANSPORTADOR , UN ROBOT DE TRANSFERENCIA DE ASIENTOS DESDE EL EMPLAZAMIENTO DE ESPERA HACIA EL EMPLAZAMIENTO DE REFERENCIA DE LAS CAJAS , COMPRENDIENDO EL ROBOT UN PRENSOR DE EXTREMO CONSTITUIDO POR DOS CAJONES Y DE ASPIRACION CUYAS CARAS ACTIVAS ESTAN CONTENIDAS EN PLANOS SENSIBLEMENTE PERPENDICULARES, SIENDO SOPORTADOS LOS CAJONES CON DESPLAZAMIENTO POR UNA ESTRUCTURA DE SOSTENIMIENTO ARTICULADO EN EL EXTREMO DEL BRAZO DE ROBOT.
ROBOT INDUSTRIAL CON UNIDADES DE ENGRANAJE REDUCTOR INTEGRADAS.
(01/07/1997). Solicitante/s: COMAU S.P.A.. Inventor/es: MAULETTI, ENRICO.
SE PROPORCIONA UN ROBOT INDUSTRIAL CON UNA PLURALIDAD DE ELEMENTOS ARTICULADOS UNOS A OTROS, CUYA ROTACION SE ACCIONA POR RESPECTIVOS MOTORES ELECTRICOS MEDIANTE UNIDADES DE ENGRANAJES REDUCTORES, QUE ESTAN INTEGRADAS EN LA ESTRUCTURA DE ESTOS ELEMENTOS.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}