CIP-2021 : B25J 17/00 : Uniones.
CIP-2021 › B › B25 › B25J › B25J 17/00[m] › Uniones.
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 17/02 · Uniones articuladas.
CIP2021: Invenciones publicadas en esta sección.
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE.
(28/05/2020). Solicitante/s: ORTEGA CARRILLO, Hernando. Inventor/es: ALCANTARA TALAVERA,Magno, NERI GONZALEZ,Jose Francisco.
Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio de un diseño que permite la aplicación de forma separable de al menos un arreglo de tensores elásticos en al menos una de una pluralidad de ubicaciones disponibles como parte de dichos eslabones. Así, se proporciona un sistema robótico que amortigua las vibraciones y que genera un efecto de soporte dinámico ajustable representable por vectores que depende del requerimiento del usuario aplicable en extremidades robóticas, prótesis, órtesis y/o exoesqueletos.
Disposición articulada con al menos un eje accionado.
(26/04/2019) Disposición articulada con al menos un eje accionado, en particular para activar un movimiento de un componente de un robot,
- en donde al menos un primer elemento base aloja un primer elemento de rotación y el primer elemento de rotación puede rotar alrededor de un primer eje de rotación ,
- en donde el primer elemento de rotación aloja un segundo eje de rotación separado del primer eje de rotación , alrededor del cual un segundo elemento de rotación puede pivotar en el primer elemento de rotación ,
- en donde el segundo elemento de rotación aloja un tercer eje de rotación separado del segundo eje de rotación , alrededor del cual un segundo elemento base …
Aparato de posicionamiento para uso biomédico.
(20/02/2019) Aparato de posicionamiento médico para posicionar y sostener un objeto, que comprende:
un componente telescópico que se extiende entre un primer extremo y un segundo extremo y que tiene una longitud ajustable;
un componente de soporte para recibir el objeto;
un componente de base que se puede asegurar a una base;
un primer mecanismo de articulación que asegura de manera móvil el componente de soporte al primer extremo del componente telescópico ;
un segundo mecanismo de articulación que asegura de manera móvil el componente de base al segundo extremo del componente telescópico , teniendo cada uno de los mecanismos de articulación primero y segundo al menos dos grados de libertad de rotación;
un dispositivo de bloqueo conectado funcionalmente a los mecanismos de articulación…
Dispositivo de posicionamiento previo y de fijación amovible de miembros articulados de un robot humanoide.
(12/04/2017). Solicitante/s: Softbank Robotics Europe. Inventor/es: CLERC,VINCENT, HOUCHU,LUDOVIC, MUGNIER,FABIEN.
Robot móvil que comprende un tronco y varios miembros conectados al tronco de manera amovible, caracterizado porque comprende:
* para cada uno de los miembros , unos medios para posicionar previamente dicho miembro en el tronco , y
* una única brida conectada al tronco y configurada para fijar de manera amovible el conjunto de los miembros al tronco
* y porque cada uno de los miembros comprende una articulación motorizada, por medio de la cual dicho miembro se posiciona y se fija al tronco y, puede accionarse en movimiento con respecto al tronco.
PDF original: ES-2672579_T3.pdf
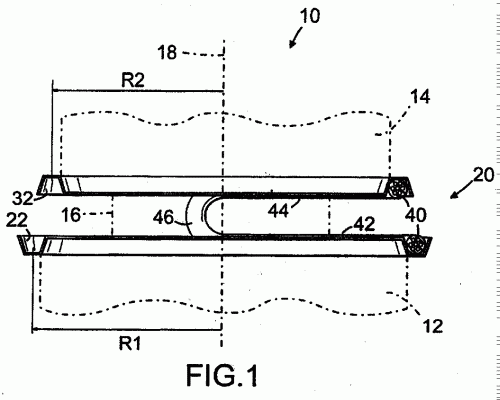
Una herramienta flexible.
(29/07/2015) Una herramienta flexible , que comprende:
una pluralidad de segmentos interconectados movibles relacionados entre sí; y
medios rígidos, que comprenden un medio el cual llena las áreas entre los elementos de la articulación (18a-d, 20) de los segmentos;
en donde el medio es conmutable durante el uso a partir de un primer estado de rigidez relativamente baja en donde el medio se comporta como un fluido hacia un segundo estado de rigidez relativamente alta en donde el medio es rígido y subsecuentemente conmutable a partir del segundo estado de regreso al primer estado;
y en donde el medio actúa en el primer estado…
Un dispositivo de múltiples piezas de ligadura que tiene un miembro de refuerzo.
(20/06/2012) Un dispositivo de múltiples piezas de ligadura o eslabones y dirigible, que comprende:
un primer mecanismo de múltiples piezas de ligadura;
caracterizado por que el dispositivo de múltiples piezas de ligadura y dirigible comprende, de manera adicional:un segundo mecanismo de múltiples piezas de pieza de ligadura o eslabones,
de tal manera que el segundo mecanismo de múltiples piezas de ligadura rodea concéntricamente el primermecanismo de múltiples piezas de ligadura, y de modo que el segundo mecanismo de múltiples piezas deligadura comprende:
una primera pieza de ligadura ;
una pluralidad de piezas de ligadura intermedias , de tal manera que una primera de las piezas de ligaduraintermedias está acoplada de forma movible a la primera pieza de ligadura , de modo que lapluralidad de piezas de ligadura intermedias…
(19/04/2012) Brazo poliarticulado.
La invención se refiere a un brazo poliarticulado en un plano , que comprende un primer elemento , un segundo elemento y un tercer elemento articulados sucesivamente mediante articulaciones , que definen su dirección longitudinal , en el que el primer elemento y el tercer elemento están articulados entre sí por un vástago mediante dos articulaciones situadas cada una a proximidad de la articulación de cada uno de dichos elementos con el segundo elemento y en dirección perpendicular a la dirección longitudinal los elementos primero y tercero y estando dichas dos…
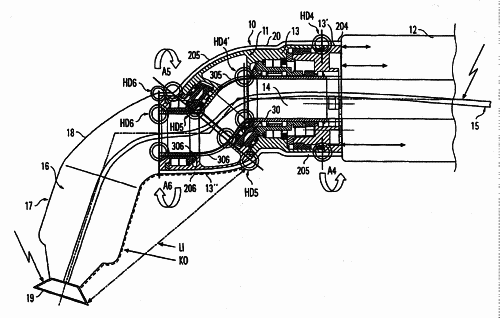
MAQUINA DE REVESTIMIENTO CON UN PULVERIZADOR Y UNA ARTICULACION GIRATORIA.
(16/10/2005). Ver ilustración. Solicitante/s: DURR SYSTEMS GMBH. Inventor/es: HERRE, FRANK, HEZEL, THOMAS, HAAS, JURGEN.
Máquina de revestimiento para el revestimiento en serie electrostático de piezas de trabajo con un pulverizador el cual para la carga del material de revestimiento rociado por él está conectado a una conducción de alta tensión , y con una articulación giratoria que conecta el pulverizador con un brazo de máquina móvil, cuyos elementos pueden ser girados relativamente unos respecto de los otros por un mecanismo de accionamiento que se encuentra en la articulación y que forman un espacio hueco para las conducciones que conducen al pulverizador, caracterizada porque entre el pulverizador y el brazo de máquina se extiende, a lo largo de la articulación giratoria , una envoltura aislante para la alta tensión del pulverizador, la cual presenta, en función de los elementos de la articulación giratoria que pueden ser girados relativamente unos respecto de los otros, unas secciones que giran unas con respecto a las otras.
DISPOSITIVO DE GUIADO DE CONDUCCION FLEXIBLE PARA UN ROBOT INDUSTRIAL.
(16/05/2004). Ver ilustración. Solicitante/s: ABB AB. Inventor/es: LUNDSTRIM, CHRISTER, THIEDE, GUNNAR.
Una guía de línea para un robot industrial con una línea continua flexible , que incluye un circuito entre un par de piezas giratorias de un robot industrial que giran una con respecto a la otra en torno a un eje , en el que el circuito incluye un par de torones de la línea acoplados a una barra curvada que se extiende en torno al eje , las caras externas de los torones se encuentran engranadas con las piezas respectivas, de modo que el circuito genera un movimiento en torno al eje cuando las piezas giran una con respecto a la otra, que está caracterizado porque el engranaje incluye una ranura separada dispuesta para cada torón.
CONECTOR PERFECCIONADO, PARA ACOPLAMIENTO ENTRE DISPOSITIVOS TOMA-MUESTRAS Y SU ROBOT MANIPULADOR.
(01/11/2003) 1. Conector perfeccionado, para acoplamiento entre dispositivos toma-muestras y su robot manipulador, caracterizado porque: a) se estructura en un primer cuerpo-tubular y un segundo cuerpo tubular dispuestos coaxialmente, siendo el diámetro exterior del primer cuerpo tubular similar al diámetro interior del segundo cuerpo tubular para su mutuo montaje ajustado con apriete formando un conjunto monobloque; b) el citado primer cuerpo tubular es de mayor longitud que el citado segundo cuerpo tubular , para la conexión coaxial, comportando medios para montarse ajustadamente en cajeras dimensionalmente conjugadas previstas, respectivamente, en el dispositivo toma- muestras y en su robot manipulador. 2. Conector perfeccionado, para acoplamiento entre dispositivos…
(16/06/1998) LA INVENCION SE REFIERE A UN ROBOT INDUSTRIAL HUECO ESPECIALMENTE ADECUADO PARA TRABAJOS DE ELABORACION TALES COMO SOLDADURAS POR PUNTOS O POR ARCO, HERMETIZACION, PINTURA, ENCOLADO, FRESADO POR LASER, ETC. EL ROBOT CONSTA DE UN BRAZO ROBOT INFERIOR TUBULAR , CUYO EXTREMO INFERIOR SE ENCUENTRA ACOJINADO DE FORMA PIVOTANTE EN UN SOPORTE ROBOT ALREDEDOR DE UN PRIMER EJE PREFERENTEMENTE HORIZONTAL Y ACOJINADO DE FORMA ROTATIVA ALREDEDOR DE UN SEGUNDO EJE (B) QUE COINCIDE CON EL EJE LONGITUDINAL DEL BRAZO . HAY UN BRAZO ROBOT SUPERIOR TUBULAR CONECTADO DE FORMA ARTICULADA AL EXTREMO SUPERIOR DEL BRAZO ROBOT INFERIOR A TRAVES DE UN MIEMBRO DE JUNTA ARTICULADA A MODO DE MANGUITO…
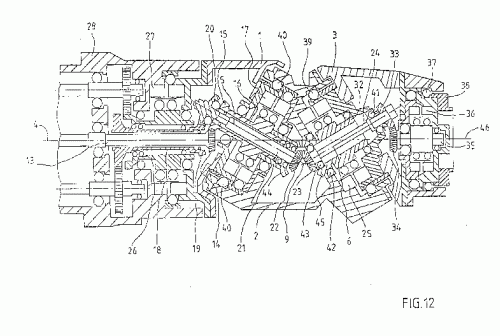
CABEZA DE TRANSMISION PARA MANIPULADORES.
(16/03/1988). Ver ilustración. Solicitante/s: SCHWISSANLAGEN, KUKA ROBOTER GMBH. Inventor/es: ZIMMER, ERNST.
LA CABEZA DE TRANSMISION DESCRITA COMPRENDE UNA DISPOSICION DE TRANSMISION CON TRES ARBOLES CONCENTRICOS DE ACCIONAMIENTO Y CUATRO MOVIMIENTOS DE GIRO DE LA TRES PARTES DE LA CABEZA, PRESENTANDO DICHA DISPOSICION ARBOLES HUECOS UNIDOS ENTRE SI A LO LARGO DE EJES OBLICUOS , CON LO CUAL SE PUEDE INDUCIR DESDE UN MOTOR EL MOVIMIENTO ROTATIVO SIMULTANEO EN SENTIDOS CONTRARIOS DE LAS PARTES CENTRAL Y POSTERIOR DE LA CABEZA. EN DICHA PARTE POSTERIOR HAY UN ARBOL PROPULSOR GIRATORIO QUE VA UNIDO CON EL PORTAHERRAMIENTAS Y QUE RECIBE SU ACCIONAMIENTO DE UN TREN DE TRANSMISION GUIADO A TRAVES DE LOS ARBOLES HUECOS . LA CABEZA DE TRANSMISION DEL INVENTO ES PARTICULARMENTE ADECUADA PARA MANIPULADORES DE PIEZAS DEL TIPO DE ROBOTS EN LA INDUSTRIA DEL AUTOMOVIL Y OTRAS.
APARATO MANIPULADOR MEJORADO PARA UN AGARRADOR DISPUESTO JUNTO A UN BRAZO EN VOLADIZO.
(01/12/1980). Solicitante/s: INDUSTRIE-WERKE KARLSRUHE AUGSBURG AG..
DISPOSITIVO ARTICULADO PARA MOVIMIENTO EN TRES DIMENSIONES. SU ESTRUCTURA CONSISTE EN UN BRAZO EN VOLADIZO AL CUAL SE FIJA EL ELEMENTO AGARRADOR , TENIENDO LA ARTICULACION DE LAS BARRAS (3 Y 4) DE DIFERENTE LONGITUD, EL ACOPLADOR Y EL PUENTE ; EL PUENTE Y UNA BARRA GUIA SE UNEN POR LA ARTICULACION ESTACIONARIA C CON UNA MENSULA , LA OTRA ARTICULACION D DEL PUENTE ESTA UNIDA DE MODO AJUSTABLE EN ALTURA, LA MENSULA UNIDA FIJAMENTE A UNA PLATAFORMA GIRA SOBRE RODILLOS, QUE A SU VEZ SE APOYA SOBRE UNA PLATAFORMA ESTACIONARIA PERMITIENDO UN MOVIMIENTO DE ROTACION HORIZONTAL DE 360 GRADOS; LA COMPENSACION DE PESOS SE EFECTUA MEDIANTE UN CILINDRO DE AIRE A PRESION, SUSCEPTIBLE DE BASCULAR EN UN PUNTO DE ROTACION EN LA MENSULA , EL PISTON DE ESTA UNIDO CON LA ARTICULACION DE CUADRILATERO A, B, C Y D A TRAVES DE UNA BARRA DE GUIA TRIANGULAR . USADO PARA MOVER CARGAS EN MOVIMIENTO TRIDIMENSIONAL.
PERFECCIONAMIENTOS EN LOS DISPOSITIVOS DE ARTICULACIÓN CON TRANSMISIÓN DE MOVIMIENTOS.
(01/07/1964). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}
{kind=link}