Árbol telescópico para un robot industrial de acuerdo con el concepto delta.
Un árbol telescópico (10) para uso en un robot (1) de acuerdo con el concepto delta,
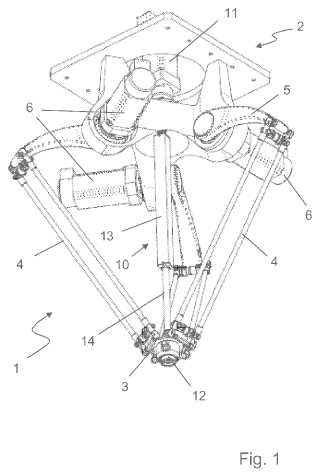
teniendo el árboltelescópico (10) extremos opuestos para conectarlos a una sección de base (2) y a una placa móvil (3) de dichorobot, cuando el árbol telescópico está montado en el robot, comprendiendo el árbol telescópico un brazo tubularexterior (13) que lleva una primera unión de extremo (16) y un brazo interior coaxial (14) deslizable dentro del brazotubular exterior y que lleva una segunda unión de extremo (19), estando dicho árbol telescópico adaptado paratransmitir un par torsor de uno a otro de dicho brazo interior y brazo exterior, y en el que
- dicho brazo tubular exterior (13) tiene una sección transversal poligonal;
- dicho brazo interior (14) tiene una parte de cabeza (14a) conformada a fin de proporcionar un acoplamientotorsionalmente rígido y deslizante con el brazo tubular exterior poligonal (13), adaptado para transmitir al menos granparte de dicho par torsor entre dicho brazo exterior y brazo interior;
- un extremo distal (17) de dicho brazo tubular exterior (13), opuesto a dicha primera unión de extremo (16), estácerrado con una tapa extraíble (18), proporcionando dicha tapa un acoplamiento de guía deslizante (31, 32) para elbrazo interior (14).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09171249.
Solicitante: CAMA 1 SPA.
Nacionalidad solicitante: Italia.
Dirección: Via Vittor Pisani, 12/A 20124 Milano ITALIA.
Inventor/es: Bellante,Daniele.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- B25J18/02 B25J […] › B25J 18/00 Brazos. › extensibles.
- F16D3/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16D ACOPLAMIENTOS PARA LA TRANSMISION DE MOVIMIENTOS DE ROTACION (transmisión para transmitir la rotación F16H, p. ej. transmisiones por fluidos F16H 39/00 - F16H 47/00 ); EMBRAGUES (embragues dinamo-eléctricos H02K 49/00; embragues que utilizan atracción electrostática H02N 13/00 ); FRENOS (sistemas de frenado electrodinámicos para vehículos, en general B60L 7/00; frenos dinamoeléctricos H02K 49/00). › F16D 3/00 Acoplamientos extensibles, es decir, con medios que permiten el movimiento entre partes acopladas durante su accionamiento (acoplamientos desmontables por movimiento axial simplemente F16D 1/10; acoplamientos de deslizamiento F16D 7/00; acoplamientos mediante fluidos F16D 31/00 - F16D 39/00). › especialmente adaptados para permitir un desplazamiento axial.
PDF original: ES-2384674_T3.pdf
Fragmento de la descripción:
Árbol telescópico para un robot industrial de acuerdo con el concepto delta Campo de la invención La invención se refiere a un árbol telescópico para uso en un robot industrial de acuerdo con el concepto delta y a un robot que comprende un árbol de este tipo.
Técnica anterior El robot de acuerdo con el concepto delta, también denominado robot delta, se conoce gracias al documento US-A4976582. Los robots delta se usan mucho, por ejemplo, en la industria alimentaria, por ejemplo, para manipular de manera precisa artículos pequeños en una máquina de envasado; en el campo de la cirugía y la medicina y en otros muchos campos.
Un robot delta comprende una sección de base y una placa móvil conectada a una serie de barras articuladas. La placa móvil se puede posicionar en un área determinada de trabajo y soporta una herramienta giratoria o dispositivo de agarre. La provisión de un motor para hacer funcionar dicha herramienta, fijado directamente a la placa móvil, tiene el inconveniente de una mayor masa e inercia de las partes móviles. Por lo tanto, normalmente un árbol telescópico está dispuesto entre la placa móvil y un motor situado en la sección de base. Dicho árbol telescópico también se conoce como el cuarto eje del robot delta.
Un árbol telescópico coaxial conocido comprende básicamente un brazo tubular exterior que lleva una primera unión de extremo para recibir el par torsor de entrada y un brazo interior coaxial deslizable dentro del brazo exterior y que lleva una segunda unión de extremo para transmitir el par torsor a la herramienta de la placa móvil.
El árbol telescópico de un robot delta debe funcionar a una velocidad considerable, soportando un gran par torsor y una velocidad lineal considerable de la placa móvil. Por lo tanto, es necesario que sea ligero, pero muy resistente tanto al esfuerzo de torsión como al de flexión. Además, el robot delta con frecuencia se usa en entornos en los que las normas de salud e higiene son muy rigurosas, tales como, en la industria alimentaria.
Un brazo telescópico convencional no está adaptado para cumplir con dichos requisitos, de manera que, en la técnica anterior, se ha intentado encontrar realizaciones de un árbol telescópico más apropiadas para uso como el cuarto eje de un robot delta.
En el documento EP-A-1 135 238 se describe un robot delta que comprende un brazo telescópico con un eje interior y un tubo exterior desplazable respecto al eje interior en una dirección longitudinal, un casquillo rígido torsional está dispuesto de manera fija en el tubo exterior y un dispositivo de guía está dispuesto en el eje interior. No obstante, dicho brazo telescópico tiene los inconvenientes de un difícil acceso al interior y la necesidad de un acoplamiento preciso entre el casquillo y el eje deslizante. Otro inconveniente es la necesidad de lubricación, lo que no es conveniente para la industria farmacéutica y alimentaria debido al riesgo de contaminación del producto.
Resumen de la invención El problema que subyace a la invención es proporcionar un robot delta con una estructura novedosa del cuarto eje telescópico, adaptada para cumplir con los requisitos de una construcción rígida a la torsión y a la flexión, limpieza y mantenimiento sencillos, acoplamiento preciso entre las partes deslizantes sin un maquinado caro.
El problema se soluciona con un árbol telescópico de acuerdo con la reivindicación 1.
La invención proporciona además un robot de acuerdo con la reivindicación 2 que comprende un árbol telescópico de este tipo y un procedimiento de acuerdo con la reivindicación 13 para fabricar un robot de este tipo.
La sección poligonal del brazo tubular exterior puede tener cualquier cantidad de laterales. Preferentemente, la sección transversal del brazo tubular exterior es cuadrilátera, más preferentemente, rectangular o cuadrada.
La sección transversal poligonal del brazo exterior permite un engranaje de forma torsionalmente rígido y transmisor de par torsor con la parte de cabeza del brazo interior. De acuerdo con un aspecto de la invención, la parte de cabeza del brazo interior tiene una pluralidad de elementos elásticamente deformables adosados a partes de la superficie interna del brazo exterior a fin de permitir un deslizamiento sin huelgo capaz de transmitir el par torsor. En una realización preferente, los elementos elásticamente deformables tienen caras de contacto adosadas a la superficie interna del brazo exterior y, más preferentemente, dichos elementos elásticamente deformables están dispuestos para proporcionar al menos una de dichas caras de contacto en contacto con cada uno de los laterales interiores de la sección transversal poligonal del brazo exterior.
En una realización preferente, la parte de cabeza del brazo interior se obtiene con un casquillo asociado al brazo propiamente dicho. Dicho casquillo se puede fijar (por ejemplo, pegar) o asociar, de manera reversible, al brazo interior.
Más preferentemente, dicho casquillo comprende una parte de cuerpo principal y una pluralidad de dichos elementos elásticamente deformables en forma de lengüetas que divergen de dicha parte de cuerpo y adosadas a la superficie interna del brazo tubular exterior.
Preferentemente, cada una de dichas lengüetas tiene forma sustancialmente triangular, con un vértice biselado y cortes laterales que definen las caras de contacto con el brazo tubular exterior. En una realización más preferente, cada lengüeta triangular tiene una zona de punta con dos caras de contacto dispuestas para contactar caras adyacentes de la superficie interna del brazo tubular exterior, por ejemplo, dos superficies adyacentes de un brazo tubular exterior cuadrado. Preferentemente, el contacto es cerca de la esquina formada por las dos superficies adyacentes. Por ejemplo, un acoplamiento efectivo con un brazo tubular exterior cuadrado se obtiene con un casquillo cilíndrico fijado al brazo interior, teniendo cada extremo del casquillo cuatro lengüetas elásticas dispuestas en cruz dirigidas hacia las esquinas del brazo tubular cuadrado y provistas de dos cortes cada una.
De acuerdo con otro aspecto de la invención, la tapa extraíble tiene medios de guía y/o de cierre adecuados que actúan sobre el brazo interior. En una realización, la tapa de extremo tiene un agujero pasante que tiene la misma forma y dimensiones que la sección transversal de un brazo tubular interior del árbol telescópico y que proporciona un acoplamiento de guía deslizante para dicho brazo interior. Por ejemplo, un brazo tubular interior de sección transversal circular se desliza a través de un agujero circular de la tapa extraíble, coincidiendo el diámetro del agujero con el diámetro exterior del brazo interior, con un pequeño huelgo para permitir el libre desplazamiento del brazo interior respecto a la tapa y, por lo tanto, respecto al brazo exterior.
En una realización, la tapa extraíble tiene una pluralidad de orejetas elásticamente deformables dispuestas alrededor de un borde de dicho agujero pasante, teniendo dichas orejetas respectivas superficies de contacto adosadas a dicho brazo tubular interior y proporcionando un medio de guía adicional para el mismo.
En funcionamiento, uno de los brazos interior y exterior recibe un par torsor de entrada, que se transmite al otro de los brazos interior y exterior. Por ejemplo, el brazo interior o el brazo exterior tiene una unión articulada conectada a un motor de una placa de base del robot. El otro brazo suministra el par torsor a una placa móvil del robot. Un aspecto de la invención es que al menos gran parte de dicho par torsor de entrada se transmite por medio del acoplamiento torsionalmente rígido y deslizante entre la parte de cabeza del brazo interior y el brazo tubular exterior poligonal.
De acuerdo con realizaciones diferentes de la invención, el brazo interior puede ser un brazo tubular que tiene una sección transversal circular o no circular. En realizaciones con un brazo tubular interior no circular, por ejemplo, un brazo tubular cuadrado, el agujero de la tapa extraíble fijada al brazo exterior está conformado en consecuencia y, por consiguiente, el acoplamiento entre la tapa extraíble y el brazo interior puede tener cierta rigidez torsional y puede transmitir una parte menor del par torsor. No obstante, la mayoría del par torsor pasa a través del acoplamiento torsionalmente rígido específico en la cabeza deslizante del brazo interior.
De acuerdo con un aspecto adicional de la invención,... [Seguir leyendo]
Reivindicaciones:
1. Un árbol telescópico (10) para uso en un robot (1) de acuerdo con el concepto delta, teniendo el árbol telescópico (10) extremos opuestos para conectarlos a una sección de base (2) y a una placa móvil (3) de dicho robot, cuando el árbol telescópico está montado en el robot, comprendiendo el árbol telescópico un brazo tubular exterior (13) que lleva una primera unión de extremo (16) y un brazo interior coaxial (14) deslizable dentro del brazo tubular exterior y que lleva una segunda unión de extremo (19) , estando dicho árbol telescópico adaptado para transmitir un par torsor de uno a otro de dicho brazo interior y brazo exterior, y en el que
- dicho brazo tubular exterior (13) tiene una sección transversal poligonal;
- dicho brazo interior (14) tiene una parte de cabeza (14a) conformada a fin de proporcionar un acoplamiento torsionalmente rígido y deslizante con el brazo tubular exterior poligonal (13) , adaptado para transmitir al menos gran parte de dicho par torsor entre dicho brazo exterior y brazo interior;
- un extremo distal (17) de dicho brazo tubular exterior (13) , opuesto a dicha primera unión de extremo (16) , está cerrado con una tapa extraíble (18) , proporcionando dicha tapa un acoplamiento de guía deslizante (31, 32) para el brazo interior (14) .
2. Un robot industrial (1) de acuerdo con el concepto delta, que comprende una sección de base (2) ; una placa móvil (3) conectada a la sección de base por medio de un sistema de brazos (4) y un árbol telescópico (10) de acuerdo con la reivindicación 1 con extremos opuestos conectados a la sección de base y a la placa móvil, respectivamente.
3. Un robot de acuerdo con la reivindicación 2, donde el brazo tubular exterior (13) tiene una sección transversal poligonal cuadrilátera, tal como rectangular o cuadrada, preferentemente, una sección transversal cuadrada.
4. Un robot de acuerdo con la reivindicación 2 o 3, estando dicha parte de cabeza (14a) del brazo interior
(14) provista de una pluralidad de elementos elásticamente deformables (22) adosados a la superficie interna (13a) del brazo tubular exterior (13) .
5. Un robot de acuerdo con la reivindicación 4, teniendo dichos elementos elásticamente deformables (22) caras de contacto (23) adosadas a la superficie interna (13a) del brazo tubular exterior, estando la parte de cabeza (14a) del brazo interior dispuesta a fin de tener al menos una cara de contacto (23) en contacto con cada cara interna de la sección transversal poligonal del brazo tubular exterior (13) .
6. Un robot de acuerdo con la reivindicación 5, comprendiendo el brazo interior un casquillo (20) asociado a un extremo del brazo interior y formando dicha parte de cabeza (14a) .
7. Un robot de acuerdo con la reivindicación 6, teniendo dicho casquillo (20) una parte de cuerpo (21) asociada al brazo interior (14) y extendiéndose una pluralidad de lengüetas (22) , que forman los elementos elásticamente deformables desde dicho cuerpo (21) .
8. Un robot de acuerdo con la reivindicación 7, donde cada una de dichas lengüetas (22) tiene forma sustancialmente triangular, con un vértice biselado (24) y cortes laterales que definen dichas caras de contacto (23) .
9. Un robot de acuerdo con una cualquiera de las reivindicaciones 2 a 8, siendo dicho brazo interior (14) un brazo tubular que tiene una sección transversal circular o poligonal.
10. Un robot de acuerdo con la reivindicación 9, teniendo dicha tapa extraíble (18) un agujero pasante (36) que tiene la misma forma y dimensiones que la sección transversal del brazo tubular interior (14) y proporcionando dicho acoplamiento de guía deslizante para el brazo interior.
11. Un robot de acuerdo con la reivindicación 10, teniendo la tapa extraíble (18) una pluralidad de orejetas elásticamente deformables (32) dispuestas alrededor de un borde de dicho agujero pasante (36) , teniendo dichas orejetas respectivas superficies de contacto (34) adosadas al brazo tubular interior (14) y proporcionando un medio de guía adicional para el mismo.
12. Un robot de acuerdo con una cualquiera de la reivindicaciones 2 a 11, donde dichos brazo tubular exterior y brazo interior (13, 14) están hechos de un material autolubricante.
13. Un procedimiento para fabricar un robot industrial (1) de acuerdo con el concepto delta, que
comprende proveer un árbol telescópico (10) de extremos opuestos para conectarlos a una sección de base (2) y a una placa móvil (3) de dicho robot (1) , respectivamente, para transmitir un par torsor de dicha sección de base a la placa móvil, comprendiendo el árbol telescópico un brazo tubular exterior (13) que tiene una sección transversal poligonal; un brazo interior (14) que se desliza en el brazo tubular exterior y que tiene una parte de cabeza (14a) conformada a fin de proporcionar un acoplamiento torsionalmente rígido y deslizante con el brazo tubular exterior poligonal (13) , adaptado para transmitir un par torsor entre dicho brazo exterior y brazo interior, estando cerrado un extremo distal de dicho brazo tubular exterior (13) , opuesto a dicha primera unión de extremo, con una tapa extraíble (18) que proporciona un acoplamiento de guía deslizante para el brazo interior (14) .
Patentes similares o relacionadas:
Árbol de dirección para un vehículo de motor, del 22 de Julio de 2020, de THYSSENKRUPP PRESTA AG: Árbol de dirección para un vehículo de motor que comprende un árbol exterior configurado como árbol hueco en el que está dispuesto coaxialmente un árbol interior […]
Procedimiento para la fabricación de un árbol de dirección regulable en longitud y árbol de dirección regulable en longitud, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Procedimiento para la fabricación de un árbol de dirección regulable en longitud , que comprende un eje hueco en el que está alojado un eje dentado con movimiento […]
Sistema, procedimiento y aparato para el control del anillo de tolerancia de las fuerzas de deslizamiento de la interfaz de deslizamiento, del 22 de Abril de 2020, de Saint-Gobain Performance Plastics Rencol Ltd: Un anillo de tolerancia, que comprende: una banda anular metálica y un material de baja fricción, caracterizado por que el material de […]
Procedimiento para fabricar un árbol hueco perfilado para un árbol de dirección telescópico de un automóvil, del 22 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Procedimiento para fabricar un árbol hueco perfilado para un árbol de dirección telescópico de un automóvil, que comprende la puesta a disposición de […]
Conjuntos de tubo de torsión para su uso con dispositivos de alta sustentación de aeronave, del 15 de Enero de 2020, de THE BOEING COMPANY: Aeronave, que comprende: un acoplamiento de ranura que tiene una segunda horquilla , el acoplamiento de ranura acoplado a un […]
Sistema de unión para estructuras reticulares móviles, del 11 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: 1. Sistema de unión para estructuras reticulares móviles para la conexión de extremos de barras caracterizado porque comprende: - un núcleo esférico completamente […]
Árbol de dirección para un vehículo de motor, del 26 de Marzo de 2019, de THYSSENKRUPP PRESTA AG: Árbol de dirección para un vehículo de motor, que comprende una primera parte de árbol y una segunda parte de árbol telescópica con […]
Una realización de componente de anillo en conjunto deslizante de árbol de transmisión, del 16 de Enero de 2019, de Tirsan Kardan Sanayi Ve Ticaret Anonim Sirketi: Un conjunto deslizante del árbol de transmisión que comprende un componente hembra que tiene una forma estriada interior , un componente macho que tiene […]