MECANISMO Y MODULO ARTICULADO.
Mecanismo y módulo articulado.
Se describen un mecanismo y un módulo de posicionamiento que permite alcanzar una posición y orientación determinada del plano móvil respecto al extremo de referencia fijo (plano fijo).
Este módulo mecánico puede utilizarse en aquellas aplicaciones en las que sea necesario mover o posicionar materiales, herramientas de manufactura, mantenimiento o de control o inspección, etc., mediante el acoplamiento a uno de sus planos de la herramienta adecuada para la relación de la tarea.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030952.
Solicitante: UNIVERSIDAD MIGUEL HERNANDEZ DE ELCHE.
Nacionalidad solicitante: España.
Inventor/es: MARIN LOPEZ,JOSE MARIA, JIMENEZ GARCIA,LUIS MIGUEL, REINOSO GARCÍA,Óscar, ÚBEDA GONZÁLEZ,David, GIL APARICIO,ARTURO, PAYA CATELLO,LUIS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
Descripción:
juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha
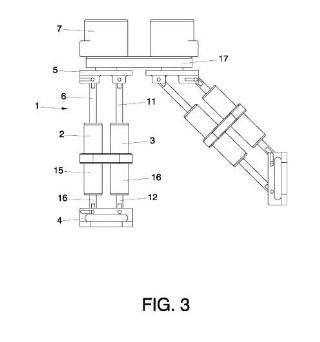
representado lo siguiente: 5 Figura 1. Muestra un esquema del mecanismo y sus componentes. Figura 2. Muestra una vista frontal del módulo formado por mecanismos objeto de la invención. dos 10 Figura 3. Muestra una vista frontal del mecanismo accionado. REALIZACIÓN PREFERENTE DE LA INVENCIÓN 15 A la vista de las figuras se describe a continuación un modo de realización preferente del mecanismo (1) y el módulo objetos de esta invención. 2 o El mecanismo (1) objeto de la invención dispone de al menos un primer actuador lineal superior (2) , que a su vez comprende un primer vástago superior (6) y un primer actuador lineal inferior (15) que comprende un primer vástago inferior (1 0) , y un segundo actuador lineal superior (3) que comprende un segundo vástago superior (11) y un segundo actuador lineal inferior (16) que comprende un segundo vástago inferior (12) tal y como se observa en la figura 1 . 25 Se dispone de un soporte superior (5) que se encuentra fijado al primer y segundo vástagos superiores (6, 11) y un soporte inferior (4) que se encuentra fijado al primer y segundo vástagos inferiores (1 O, 12) . 3 o Tal y como puede apreciarse en la figura 3, mediante el accionamiento simultaneo de los actuadores lineales (2, 3) unidos a los soportes (4, 5) , es posible efectuar un desplazamiento del mismo unadistancia " d " determinada quedando en una posición paralela a la original. Sin embargo accionando solamente uno de los dos actuadores lineales (2, 3) , por ejemplo el segundo actuador (3) , el segundo vástago inferior (12) actúa de tal forma que un eje solidario a dicho segundo vástago inferior 5 (12) es articulado con respecto a una junta inferior de un grado de libertad
(9) produciendo un giro del soporte inferior (4) en sentido antihorario ya que una junta inferior de dos grados de libertad (8) permite que un eje solidario al primer vástago inferior (1 O) se deslice por el interior de una ranura de dicha junta inferior de dos grados de libertad (8) .
Accionando selectivamente el primer actuador lineal (2) en lugar del segundo actuador lineal (3) se realizará un giro de de un ángulo "a" del soporte inferior (4) pero con sentido antihorario.
Adicionalmente se acopla al soporte superior (5) un actuador de giro
(7) para que los actuadores lineales (2, 3) puedan girar con respecto a un eje de giro relativo paralelo a los ejes longitudinales de los actuadores lineales (2, 3) .
En otro ejemplo de realización de la invención el mecanismo objeto de la invención da lugar al módulo articulado objeto de la invención al unir al menos dos mecanismos (1) mediante un eslabón (17) tal y como se aprecia en detalle en la figura 2, donde se disponen dos actuadores de giro
(7) que se acoplan a los soportes (4, 5) a través de dicho eslabón (15) . En
2 5 este ejemplo de realización los mecanismos (1) pueden disponerse ortogonalmente en la configuración del módulo.
Reivindicaciones:
1. Mecanismo (1) de orientación y posicionamiento de planos caracterizado porque comprende: -un primer actuador lineal superior (2) que comprende un primer vástago superior (6) , -un primer actuador lineal inferior (15) colineal al primer actuador lineal 1 o superior (2) que comprende un primer vástago inferior (1 0) , -un segundo actuador lineal superior (3) dispuesto en paralelo al primer actuador lineal (2) y que comprende un segundo vástago superior (11 ) , -un segundo actuador lineal inferior (16) colineal al segundo actuador lineal superior (3) que comprende un segundo vástago inferior (12) .
15. un soporte superior (5) que se encuentra acoplado al primer y segundo vástagos superiores (6, 11 ) , y
- un soporte inferior (4) que se encuentra acoplado al primer y segundo vástagos inferiores (1 O, 12) .
2 o 2. Mecanismo (1) según reivindicación 1 caracterizado porque adicionalmente comprende al menos un actuador de giro (7) acoplado a al menos uno de los soportes (4, 5) adaptado para hacer girar dicho soporte (4, 5) con respecto de un eje de giro relativo coaxial al eje de giro del actuador de giro (7) .
3. Mecanismo (1) según reivindicación 1 ó 2 caracterizado porque comprende una junta inferior con dos grados de libertad (8) , una junta superior con dos grados de libertad (13) , una junta inferior de un grado de libertad (9) y una junta superior de un grado de libertad (14) a la cuales
3 o se encuentran respectivamente acoplados los vástagos (1 0, 6, 12, 11 ) .
4. Mecanismo (1) según reivindicación 3 caracterizado porque las juntas de dos grados de libertad (8, 13) comprenden una ranura adaptada para permitir el desplazamiento y el giro.
s 5. Módulo articulado que comprende al menos dos mecanismos (1) como el descrito en una cualquiera de las reivindicaciones 1 a 4 caracterizado porque comprende al menos un eslabón (17) que se encuentran fijado a al menos uno de los soportes (4, 5) mediante los actuadores de giro (7) .
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
 Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]