8 inventos, patentes y modelos de SAENZ FERNANDEZ,AGUSTIN J.
(18/02/2011) Robot portátil.Previsto para realizar la fase de taladro en el proceso de ensamble de componentes aeronáuticos, para lo que éstos se fijan mediante útiles de precisión en una grada ; caracterizado por comprender una plataforma desplazable para ubicarla próxima a la grada , y en la que se incluye un manipulador ingrávido que soporta un bastidor dotado de una columna que soporta un cabezal de taladro desplazable en los tres ejes. Comprende medios de fijación del bastidor a la grada para realizar diferentes taladros cuando el bastidor está fijado a la grada mediante el gobierno de la cabeza de taladro mediante un control numérico.Incluye medios de reptado para desplazar el conjunto del bastidor y columna sobre la grada y permitir fijar el bastidor en una nueva posición para…
SEGUIDOR SOLAR BASADO EN CINEMATICA PARALELA.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/07/2007). Ver ilustración. Solicitante/s: FUNDACION FATRONIX. Clasificación: F24J2/54.
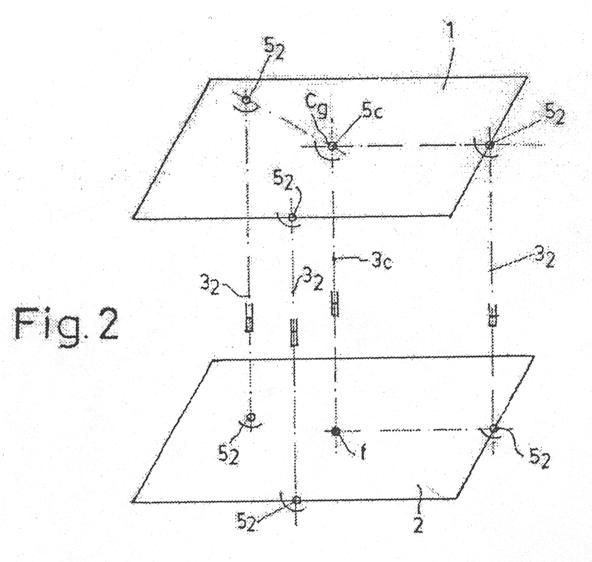
Seguidor solar basado en cinemática paralela, que consta de una plataforma fija ; una plataforma móvil portadora de paneles solares fotovoltaicos; un brazo central (3c) de longitud variable que se empotra por un extremo en la plataforma fija y se une por su otro extremo al centro geométrico (Cg) de la plataforma móvil por medio de una junta (5c) de dos grados de libertad; dos o tres brazos , de longitud variable que se unen por sus extremos a la plataforma fija y a la plataforma móvil por medio de juntas , de modo que si se utilizan dos brazos las juntas tengan al menos dos grados de libertad y si se utilizan tres brazos las juntas tengan tres grados de libertad.#Aplicable en la producción de energía eléctrica.
SISTEMA CINEMATICO PARA CABEZAL DE MAQUINA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/02/2007). Ver ilustración. Solicitante/s: FUNDACION FATRONIK. Clasificación: B23Q1/48, B23Q1/54, B25J17/02.
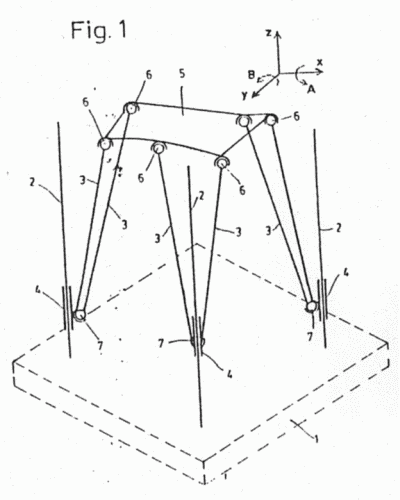
Sistema cinemático para cabezal de máquina, que consta de una primera plataforma a la que se fijan tres guías de deslizamiento con su deslizadera correspondiente, tres pares de brazos, uniéndose cada brazo por un extremo mediante una junta esférica a una segunda plataforma cabezal y por el otro extremo mediante una junta esférica a una de dichas deslizaderas, uniéndose cada par de brazos a la misma deslizadera en el mismo punto/zona. De aplicación en máquina herramienta.
SISTEMA CINEMATICO PARA CABEZAL DE MAQUINA.
Secciones de la CIP Técnicas industriales diversas y transportes Mecánica, iluminación, calefacción, armamento y voladura
(16/07/2005). Ver ilustración. Solicitante/s: FUNDACION FATRONIK. Clasificación: B23Q1/54, B25J17/02, F16M11/12.
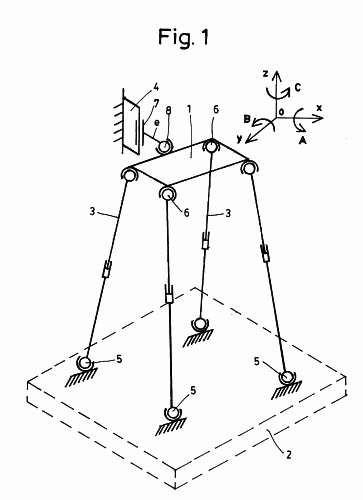
Sistema cinemático para cabezal de máquina, que consta de una primera plataforma movible según los ejes OX, OY, tres o cuatro brazos de longitud variable que se unen por un extremo mediante juntas a la primera plataforma y por su otro extremo mediante juntas a una segunda plataforma o cabezal, y disponiendo en una estructura, sin movimiento relativo respecto a la primera plataforma, un conjunto guía/deslizadera, según el eje OZ, uniéndose rígidamente a la deslizadera una junta de rotación que a su vez se une a la segunda plataforma, teniendo la junta de rotación dos o tres grados de libertad según se utilicen tres o cuatro brazos respectivamente. De aplicación en máquina herramienta.
SISTEMA CINEMATICO PARA CABEZAL DE MAQUINA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/03/2005). Solicitante/s: FUNDACION FATRONIK. Clasificación: B23Q1/48, B23Q1/54, B25J17/02, B23Q5/22.
Sistema cinemático para cabezal de máquina, que consta de: a) una primera plataforma a la que se fijan b) tres guías de deslizamiento con su deslizadera correspondiente, c) tres pares de brazos , que tienen una longitud constante, uniéndose cada brazo por un extremo mediante una junta esférica a una segunda plataforma cabezal y por el otro extremo mediante una junta esférica a una de dichas deslizaderas, uniéndose cada par de brazos a la misma deslizadera, caracterizado porque d) los seis brazos no tienen todos la misma longitud.
CELOSIA PARA ESTRUCTURA DE MAQUINA.
Secciones de la CIP Construcciones fijas Mecánica, iluminación, calefacción, armamento y voladura
(01/03/2005). Ver ilustración. Solicitante/s: FUNDACION FATRONIK. Clasificación: E04B1/19, F16S3/08, F16S3/06.
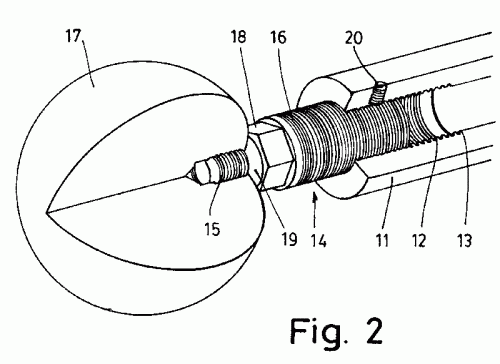
Celosía para estructura de máquina, de las que constan de una retícula de barras, uniéndose cada barra por cada extremo a un nudo-bola por medio de elementos de unión, estando cada barra roscada por sus extremos, y constando los elementos de unión de un espárrago-conector con un cuerpo y una prolongación coaxial ambos roscados y con rosca del mismo sentido, roscándose dicho cuerpo en la barra y dicha prolongación en el nudo-bola y disponiéndose entre dicho cuerpo y su prolongación de una superficie-tuerca. Aplicable en la fabricación de maquinaria.
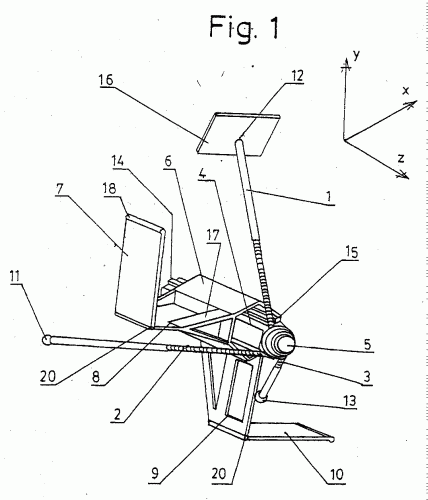
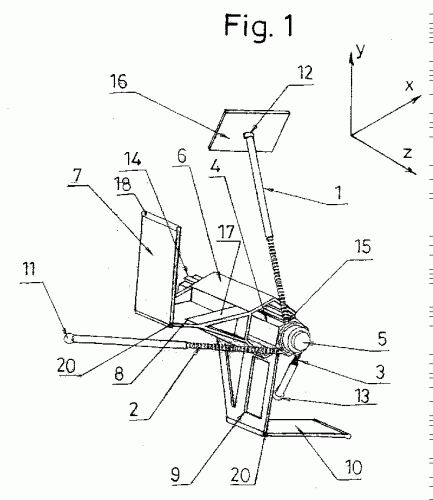
MANIPULADOR PARALELO PROVISTO DE UN MECANISMO PASICO DE GUIA.
Sección de la CIP Técnicas industriales diversas y transportes
(01/06/2004). Ver ilustración. Solicitante/s: FATRONIK SYSTEM, S.A. Clasificación: B25J17/02.
Módulo con movimiento cinemático paralelo de ejes ortogonales, consta de: a) una estructura fija ; b) una estructura pasiva que consta de, al menos, una tijera cinemática , con una unión por un extremo a la estructura fija y, por el otro extremo, con una unión a una estructura móvil plana , siendo articulada una de dichas uniones; c) una estructura móvil espacial portadora del cabezal de trabajo y que puede desplazarse linealmente respecto a la estructura móvil plana; d) unos brazos con una unión por un extremo a la estructura fija y, por el otro extremo, con una unión a la estructura móvil espacial , siendo una de las uniones de dos grados de libertad y la otra unión de tres grados de libertad; e) medios para accionar el movimiento de los brazos.
MODULO CON MOVIMIENTO CINEMATICO PARALELO DE EJES ORTOGONALES.
Sección de la CIP Técnicas industriales diversas y transportes
(16/12/2003). Ver ilustración. Solicitante/s: FUNDACION FATRONIK. Clasificación: B25J17/02.
Módulo con movimiento cinemático paralelo de ejes ortogonales que consta de una estructura fija o bancada, una estructura pasiva con, al menos, una tijera cinemática unida por uno de sus extremos a la estructura fija y por el otro extremo a una estructura móvil plana, siendo articulada una de dichas uniones; y una estructura móvil espacial portadora del cabezal de trabajo y que puede desplazarse linealmente respecto a la estructura móvil plana; y unos brazos con una unión por un extremo a la estructura fija y por el otro extremo con una unión a la estructura móvil espacial, siendo una de las uniones de dos grados de libertad y la otra unión de tres grados de libertad; y medios para accionar el movimiento de los brazos. De aplicación en máquinas herramientas.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}