ROBOT TENSEGRÍTICO.
El robot tensegrítico objeto de la invención permite el movimiento controlado y adaptar su tamaño a diversos espacios,
gracias a su configuración basada en una estructura tensegrítica actuada mediante motores controlador por medios electrónicos y de control que determinan la longitud de los elementos controlables de la estructura.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200930258.
Solicitante: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC).
Nacionalidad solicitante: España.
Inventor/es: MIRATS TUR,JOSEP M, OÑATE IBAÑEZ DE NAVARRA,EUGENIO, GAZA CODERCH,ALFRED.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- B25J9/08 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por elementos de construcción modulares.
Fragmento de la descripción:
Robot tensegrítico.
Objeto de la invención
La presente invención se refiere a un robot deformable gracias a su estructura tensegrítica.
El objeto de la invención consiste en un robot deformable que permite adaptar su tamaño a diversos espacios, gracias a su configuración basada en una estructura tensegrítica.
Antecedentes de la invención
Las estructuras tensegríticas, conocidas por su término en inglés “tensegrity-ies”, son una clase especial de estructuras flexibles cuyos elementos pueden simultáneamente realizar las funciones de fuerza estructural, actuación, sensado y control con realimentación. Son estructuras con un coeficiente resistencia/peso muy alto y fácilmente deformables en las que, teóricamente, poleas u otros actuadores pueden tensar/destensar algunos de los cables que las constituyen para cambiar sustancialmente su forma con un cambio pequeño en la energía potencial de la estructura.
La definición general de tensegridad es la de una estructura que mantiene un volumen estable en el espacio por medio de un conjunto discontinuo de elementos compresivos (barras) conectados a y por una red continua de elementos tensiles (cables, cuerdas o tendones, dependiendo de la escala de la aplicación) . Las barras son rígidas y pueden resistir fuerzas compresivas, los cables no. La mayoría de configuraciones concebibles no guardan equilibrio y si se construyen se colapsan a otra forma distinta, sólo aquellas configuraciones estables, gracias a un intrincado balance tensión-compresión, reciben el nombre de estructuras tensegríticas.
A mediados de los años 70, Donald Ingber se planteó una hipótesis en la que se relacionaba las estructuras tensegrítica con el comportamiento mecánico de las células. Para comprobarlo, modeló una estructura compuesta por seis barras unidas con hilos elásticos. Al colocarla sobre una superficie rígida comprobó que tendía a adoptar una forma aplanada, mientras que sobre una superficie flexible se alzaba mostrando una conformación más redondeada. Este comportamiento se ajustaba al observado en células cuando se depositaban sobre el mismo tipo de superficies. Ingber concluyó que, desde un punto de vista mecánico, la célula podía considerarse un sistema de tensegridad. Los descubrimientos en biología confirmaron esta hipótesis cuando, a principios de la década de los 80, Keith R. Porter lograba desvelar una red tridimensional de filamentos en el interior de las células: el citoesqueleto, que tendrían el mismo papel que las barras y los cables en las estructuras tensegríticas: equilibrar los esfuerzos que darían forma y rigidez a la célula.
Descripción de la invención
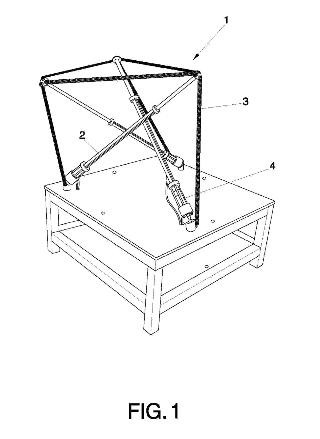
El robot objeto de la invención está basado en la estructura tensegrítica tridimensional estable más simple, el “simplex”, formado por 3 barras y 9 cables, si bien el concepto de robot tensegrítico no depende de la estructura tensegrity en la que se base el robot.
Los nodos inferiores (n1, n2, n3) van fijados al suelo evitando así desplazamientos rígidos de la estructura.
Si definimos a como el lado de la base del triángulo, y tomamos como origen de coordenadas el nodo 1, la posición de los vectores de los nodos inferiores quedaría del modo siguiente:
Los nodos superiores van unidos a los nodos inferiores mediante barras de longitud variable, de hecho esto puede ser tomado matemáticamente como una vara extensible o amortiguador con un límite de elongación superior. La barra b1 une los nodos (n2, n4) , la barra b2 los nodos (n3, n5) y la barra b3 los nodos (n1, n6) . En este caso se ha realizado una ordenación arbitraria de los nodos y las barras, esta ordenación puede ser realizada de cualquier forma que respete las conexiones entre los elementos. Por lo tanto la posición de los nodos superior puede expresarse como:
Donde lb1 indica la longitud real de la barra bi y donde bi representa un vector unitario en al dirección de la i-ésima barra.
Al actuar sobre las barras, y ya que en cada momento se modifica la longitud de algunas o la de todas ellas, la longitud de cualquier elemento tensil usado debe variar también. Para el robot objeto de la invención se utilizan muelles en lugar de cables, ya que estos primeros pueden ser adaptados de forma pasiva a la longitud requerida. A pesar de ello es igualmente válido el uso de cables actuados, es decir con los que se controle de forma activa su longitud en todo momento.
Cabe destacar que cuando los actuadores están bloqueados y no se aplican fuerzas externas, la estructura siempre permanece en un estado de mínima energía.
En el robot objeto de la invención, se consideran los muelles como elementos carentes de masa y con una elasticidad lineal con una rigidez k constante e igual para todos ellos una longitud restante lc0, siendo este parámetro la medida en la que aún puede incrementar la longitud de la barra. Así mismo se considera que la rigidez de las barras es infinita con respecto de la de los muelles.
La posición de referencia para el robot es la primera correspondiente a una configuración adecuada de tensegridad, por ejemplo aquella en la cual los muelles están siempre en tensión. Esto implica que lb = 67 cm usando un valor de 67 cm para a y tomando lc0 = 38 cm. Sin embargo se pueden generar entradas de control a partir de un valor lb entorno a
55.92 cm, más exactamente para el rango lb ∈ [55.92] cm. Cabe destacar que para el rango lb ∈ [55.97] cm la estructura ya no es una estructura tensegrítica válida ya que los muelles dejan de estar en tensión. Una de las facetas destacables del robot objeto de la invención es su capacidad de poder ser desplegado desde una posición plana totalmente plegada hasta una estructura tensegrítica tridimensional completa, un simplex.
El robot objeto de la invención dispone de un total de 15-6-3=3 grados de libertad, ya que cada barra tiene 5 grados de libertad, hay 6 uniones y 3 restricciones; sin embargo sólo se utilizan tres de esos seis grados de libertad. Estos tres grados de libertad controlables, que equivalen al vector de salida, corresponden con las coordenadas λ = (x, y, z) T del centro de masas del triángulo superior, controladas mediante los datos de entrada de control correspondientes u = (lb1, lb2, lb3) T. El resto de los grados de libertad quedan restringidos gracias a la energía potencial de los muelles, la cual debe tener un valor mínimo para llevar y controlar la estructura en una posición estable. Teniendo un juego de fuerzas en los nodos y tomando la longitud de cada una de las barras como un valor fijo, sólo hay una posición estable posible para el robot que se corresponde con la configuración de autotensión; esta es la configuración en la cual la matriz de equilibrio del robot no está vacía. Asimismo, el robot se moverá hacia una configuración de equilibrio cuando se apliquen fuerzas externas sobre los nodos estructurales, ya que el robot está subactuado y se utilizan muelles en lugar de cables, aunque los actuadores estén bloqueados.
La estructura del robot objeto de la invención tiene una configuración básica que comprende tres barras controlables mediante los actuadores unidas por cuerdas pasivas en forma de muelles. Sin embargo, tal y como se ha comentado anteriormente, esta estructura es básica y el robot puede comprender más elementos y puede ser construido en base a cualquier estructura tensigrítica. Para realizar el control del movimiento y accionamiento de los dispositivos del robot se incorpora una unidad de control electrónico para los actuadores y un sistema de toma de datos, en este caso sensores de fuerza.
La parte principal de la estructura es la que corresponde al diseño de las barras, las barras controlables o actuadas. Éstas están construidas en dos tubos concéntricos, uno de 13 x 10.5 mm que se desliza dentro de otro tubo de 18 x 15 mm, ambos de aluminio dada su ligereza, permitiendo una en longitud que varía entre 55 cm y 92 cm. Como se ha comentado anteriormente la longitud de las barras se modifica haciendo uso de un mecanismo de tornillo que va fijado mediante una tuerca al extremo del tubo interno de la barra y al eje un motor rotatorio. Este motor es del tipo DC (Faulhaber series 2342) lleva acoplado una unidad de engranajes realizados en metal (14:1) y un codificador digital (16 pulsos/rev) , quedando colocado en la base de la barra permitiendo, a partir de la rotación del eje al que va acoplado...
Reivindicaciones:
1. Robot (1) tensegrítico caracterizado porque comprende: -al menos tres barras actuadoras (2) de longitud variable que tienen un extremo inferior y un extremo superior, -unos muelles (3) pasivos dispuestos tres a tres, donde tres muelles (3) unen entre sí los extremos superiores de las barras actuadoras (2) formando un triángulo, mientras que los otros tres muelles (3) unen de forma alternada un extremo superior de cada una de las barras actuadoras (2) al extremo inferior de otra barra
actuadora (2) oaun anclaje fijo (16) ubicado en el suelo o una estructura fija, -medios de control de movimiento encargados de controlar el movimiento del robot (1) , y -medios de captación de datos encargados de captar datos de las fuerzas actuando sobre la estructura del
robot (1) , donde cada una de las barras actuadoras (2) adicionalmente comprende: -un tubo interior (5) que se desliza por el interior de un tubo exterior (6) empujado por un mecanismo de empuje provocando la variación de longitud de las barras actuadoras (2) , -un motor (4) encargado de generar movimiento de rotación que permite el funcionamiento del mecanismo de empuje, -articulaciones elásticas (8) en el extremo libre del tubo interior (5) y/o en el extremo libre del tubo exterior
(6) consistentes en una unión de tres de los muelles (3) sobre una base ubicada en dicho extremos libres.
2. Robot (1) según reivindicación 1 caracterizado porque adicionalmente comprende articulaciones esféricas (7) de rótula fija entre una esfera ubicada en el extremo inferior del tubo exterior (6) y uno de los anclaje fijos (16) .
3. Robot (1) según reivindicación 1 donde los muelles (3) son cables activos de longitud variable mediante los medios de control de movimiento.
4. Robot (1) según reivindicación 1 donde el mecanismo de empuje es un mecanismo de tornillo.
5. Robot (1) según reivindicación 1 donde la longitud de las barras actuadoras (2) varía de 55 a 92 cm.
6. Robot (1) según reivindicación 1 donde cada una de las barras actuadoras (2) comprende al menos dos interruptores de parada que evitan que el tubo interior (5) abandone el interior del tubo exterior (6) .
7. Robot según reivindicación 1 donde los medios de control de movimiento comprenden un ordenador (12) al que va conectado un FPGA (11) , que permite la transmisión de datos y comandos a través de un interfaz (10) enlazado a unos controladores digitales (9) conectados a los motores (4) .
8. Robot según reivindicación 1 donde los medios de captación de datos comprenden células de carga (13) ubicadas en los muelles (3) y conectadas a un acondicionador de señal (14) enlazado a un convertidor A/D (15) conectado al FPGA (11) y a través de este último al ordenador (12) .
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
 Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]