SISTEMA DE DESPLAZAMIENTO.
El sistema de desplazamiento se basa en una esfera (1) para conseguir un equilibrio estable,
apoyando sobre esa esfera (1) unas ruedas (3) accionadas por respectivos actuadores (4) pertenecientes al cuerpo de un robot (2), todo ello de manera que mediante un control apropiado basado en un procesador (6), el robot (2) permanece en equilibrio sobre la esfera (1) sin desplazamiento de aquel. El sistema de traslación propiamente dicho está previsto para su aplicación en robots de estabilidad dinámica, lo que permite sortear obstáculos tales como escaleras, cruzar o atravesar pilas de escombros u otros obstáculos, e incluso diseñar el cuerpo del robot (2) de forma estrecha o humanoide para poder trabajar en zonas estrechas.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201130801.
Solicitante: OCHOA GIMÉNEZ, Miguel.
Nacionalidad solicitante: España.
Inventor/es: OCHOA GIMÉNEZ,Miguel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
Descripción:
Sistema de desplazamiento
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un sistema de desplazamiento, tanto de traslación como de rotación, el cual ha sido especialmente ideado para su implantación en robots de estabilidad dinámica, basándose la traslación en una esfera como medio de locomoción y de soporte para el propio robot, si bien este sistema es igualmente aplicable a otro tipo de vehículos o dispositivos que sea necesario que dispongan de medios de traslación.
El objeto de la invención es conseguir que, mediante un apropiado sistema de control, un robot permanezca en equilibrio encima de la esfera, tratando a su vez de que no se desplace.
ANTECEDENTES DE LA INVENCIÓN
Como es sabido, existen dos tipos de robots, en cuanto al tipo de estabilidad de los mismos, uno de cuyos tipos es el de estabilidad estática y otro el de estabilidad dinámica.
Un robot es de estabilidad estática cuando su funcionamiento no afecta a su centro de gravedad, siendo éste el caso de los robots que se desplazan mediante ruedas.
Entre los problemas mas destacables que presentan los robots de estabilidad estática pueden citarse el hecho de que no son capaces de sortear obstáculos complicados, como puede ser subir escaleras, atravesar una pila de escombros, etc., independientemente de que en la mayor parte de las ocasiones resultan difíciles de controlar y no existe posibilidad de que puedan diseñarse para desplazarse por zonas estrechas.
Otro inconveniente es que los robots de estabilidad estática con ruedas no pueden rotar sobre un punto sin que se produzca un desplazamiento de los mismos.
DESCRIPCIÓN DE LA INVENCIÓN
El sistema de desplazamiento que se preconiza ha sido concebido para resolver la problemática anteriormente expuesta, estando previsto concretamente para su aplicación en robots de estabilidad dinámica, los cuales si bien son mas complicados desde el punto de vista de diseño que los de estabilidad estática, sin embargo tienen capacidad de sortear obstáculos complicados, como es subir y bajar escaleras, atravesar pilas de escombros, pudiendo diseñar el robot mejor adaptado al entorno, es decir con una estructura estrecha o humanoide que permita desplazarse en zonas estrechas.
Mas concretamente, el sistema de traslación de la invención se basa en utilizar una esfera como medio de locomoción para el robot, comportándose éste como un péndulo invertido frente a los robots de estabilidad estática y trasladables mediante ruedas, de manera que comparando un robot de estabilidad dinámica dotado del sistema de traslación basado en la esfera, según la invención, con los robots humanoides como el Asimo de Honda, aquellos resultan mucho mas económicos y mas sencillos de controlar, pudiéndose diseñar para que sean de escaso grosor, lo que resulta muy útil en zonas estrechas y perfecto para su uso doméstico.
Otra ventaja es que el robot es capaz de desplazarse lateralmente sin tener que rotar ni maniobrar, permitiendo igualmente la rotación en un punto sin desplazarse.
El cuerpo del robot incluirá unos actuadores materializados en dos o tres motores colocados de forma que actúen sobre la esfera, ya sea de forma perpendicular o a 120º respecto de ésta, incorporando cada uno de esos actuadores un encoder incremental.
Además, el cuerpo del robot incluye dos giróscopos para controlar la velocidad de inclinación.
Mediante un procesador alimentado con las correspondientes baterías, es posible, en combinación con las demás características, conseguir un sistema de control que permita que el robot permanezca en equilibrio encima de la esfera, tratando a su vez de que no se desplace.
Opcionalmente el robot puede incluir un control remoto, vía Bluetooth, para poderlo desplazar libremente mediante un mando conectado al procesador.
Por último decir que el robot puede complementarse con un sistema anti-colisiones, utilizando un sensor de ultrasonidos en la parte frontal del mismo.
Entre las múltiples y posibles aplicaciones del sistema de traslación de la invención, pueden citarse, entre
otras:
- Las sillas de minusválidos.
- Las sillas para trasladarse por ferias y museos.
- Las traspaletas para almacenes.
- Los carros de la compra.
- Las cunas de bebés.
- Etc.
DESCRIPCIÓN DE LOS DIBUJOS
Para complementar la descripción que seguidamente se va a realizar y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
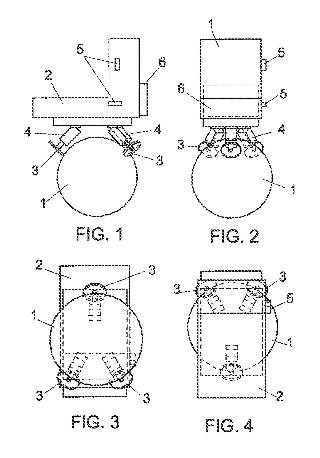
La figura 1. Muestra una vista en alzado lateral del sistema de desplazamiento materializado por una esfera asociada a un robot de estabilidad dinámica.
La figura 2. Muestra una vista frontal del conjunto representado en la figura anterior.
La figura 3. Muestra una vista en planta inferior del mismo conjunto.
La figura 4. Muestra, finalmente, una vista en planta superior, del conjunto representado en las figuras anteriores.
REALIZACIÓN PREFERENTE DE LA INVENCIÓN
Como se puede ver en las figuras referidas, el sistema de desplazamiento objeto de la invención está basado en una esfera (1) que se constituye en medio de locomoción y de soporte para un cuerpo de robot (2) que se mantiene apoyado y en equilibrio sobre la esfera (1) por medio de unas ruedas (3) accionables por correspondientes actuadores o motores (4) .
El propio robot (2) se complementa con un procesador (6) , en base al cual se consigue llevar a cabo un control del sistema completo para hacer que el conjunto se mantenga estable, es decir que el cuerpo del robot (2) quede situado en equilibrio sobre la esfera (1) como medio de locomoción para aquel.
El cuerpo del robot (2) incluye además una pareja de giróscopos (5) para controlar la velocidad de inclinación, pudiendo llevar un sensor de ultrasonidos como elemento anti-colisiones, situado sobre su parte frontal, y complementarse con un control remoto para poderlo desplazar libremente mediante un mando conectado al propio procesador (6) .
La realización del proyecto en la ejecución del sistema de traslación con el propio robot, puede considerarse en tres fases, de manera que en la primera de ellas se realiza el montaje completo en el procesador (6) mediante el uso de Solid Edge ST2. Esta herramienta 3D permite calcular diferentes parámetros físicos como momentos de inercia y centro de masas. En la segunda fase se realiza el modelado matemático tanto del cuerpo del robot (2) como de los actuadores (4) , siendo necesario realizar diferentes ensayos para la identificación de los parámetros de los actuadores propiamente dichos. En relación con la tercera fase, en la misma se diseña el control del sistema completo, para conseguir la estabilidad del conjunto y con ello hacer que el cuerpo del robot (2) quede situado en equilibrio sobre la esfera (1) . Para esto se elige la representación del modelo en espacio de estado, de manera que el control por realimentación de estado permite que se pueda controlar tanto el ángulo de inclinación como la velocidad lineal del robot.
Reivindicaciones:
1ª. Sistema de desplazamiento, que siendo aplicable a cualquier dispositivo para el que se requieran medios de desplazamiento para el mismo, ya sean de traslación y/o rotación, se caracteriza porque está constituido mediante una esfera (1) como elemento de locomoción y soporte para el cuerpo de un robot (2) , dotado éste de unos actuadores (4) con ruedas (3) de apoyo sobre la propia esfera (1) , para el desplazamiento de ésta, manteniendo estable dinámicamente el cuerpo del robot (2) sobre tal esfera (1) ; habiéndose previsto un procesador (6) para permitir el control y consecución del correspondiente equilibrio del cuerpo del robot (2) encima de la esfera (1) , e incluyendo igualmente una pareja de giróscopos (5) para controlar la velocidad e inclinación del propio cuerpo del robot (2) .
2ª. Sistema de desplazamiento, según reivindicación 1, caracterizado porque los actuadores (4) están constituidos por respectivos motores, en número de dos o tres, los cuales actúan sobre la esfera (1) bien perpendicularmente a la misma o a 120º, incorporando cada actuador o motor (4) un encoder incremental.
3ª. Sistema de desplazamiento, según reivindicación 1, caracterizado porque opcionalmente incluye un sensor de ultrasonidos en la parte frontal como medio anti-colisiones.
4ª. Sistema de desplazamiento, según reivindicación 1, caracterizado porque opcionalmente se complementa con un control remoto, vía Bluetooth, para permitir el desplazamiento del cuerpo del robot (2) mediante un 20 mando conectado al procesador (6) .
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
 Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]