UNIDAD DE MUÑON ROBOTICO INDUSTRIAL.
LA INVENCION SE REFIERE A UNA UNIDAD ARTICULADA PARA UN ROBOT INDUSTRIAL QUE CONSTA DE UN ALOJAMIENTO DE LA UNIDAD ARTICULADA (12) DISEÑADO PARA QUEDAR FIJADO DE FORMA DESMONTABLE AL EXTREMO DISTAL DEL BRAZO DE UN ROBOT (24).
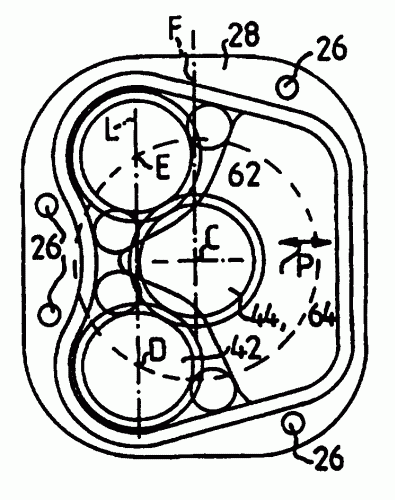
EN EL ALOJAMIENTO DE LA UNIDAD ARTICULADA (12) HAY MONTADOS DE FORMA ROTATIVA UN PRIMER Y UN SEGUNDO EJES DE ACCIONAMIENTO SECUNDARIOS (36, 56), PREFERENTEMENTE PARALELOS, SOBRE CUYOS EXTREMOS DE ENTRADA (40, 60) HAY MONTADOS UNOS ENGRANAJES PREFERENTEMENTE CILINDRICOS (42, 64) PARA ACOPLARSE A UN ENGRANAJE DE ACCIONAMIENTO CILINDRICO CORRESPONDIENTE (44, 64) QUE HAY SOBRE UN EJE DE ACCIONAMIENTO PRIMARIO CORRESPONDIENTE (46, 66) DEL BRAZO DEL ROBOT (24). VISTO DESDE UNA PROYECCION FINAL, LOS ENGRANAJES (42, 62) Y LOS ENGRANAJES DE ACCIONAMIENTO (44, 64) SE ENCUENTRAN COLOCADOS DE TAL MODO QUE UN LINEA IMAGINARIA (L), QUE SE EXTIENDE A TRAVES DE LOS CENTROS (D, E) DE LOS ENGRANAJES, SE DESCENTRE DEL EJE CENTRAL (C) DE LOS ENGRANAJES DE ACCIONAMIENTO COAXIALES (44, 64), PUDIENDOSE FIJAR DE MANERA AJUSTABLE RADIALMENTE EL ALOJAMIENTO DE LA UNIDAD ARTICULADA (12) SOBRE EL EXTREMO DEL BRAZO DEL ROBOT (24) PARA AJUSTAR LA HOLGURA DE LOS ENGRANAJES ENTRE, PRO UN LADO, LOS ENGRANAJES DE ACCIONAMIENTO (44, 64) Y, POR OTRO, LOS ENGRANAJES (42, 62).
Tipo: Resumen de patente/invención.
Solicitante: ASEA BROWN BOVERI AB.
Nacionalidad solicitante: Suecia.
Dirección: ,721 83 VASTERAS.
Inventor/es: LARSSON, JAN, DANIELSSON, STEFAN, GEPERTZ, JAN.
Fecha de Publicación: .
Fecha Solicitud PCT: 26 de Enero de 1996.
Fecha Concesión Europea: 23 de Diciembre de 1998.
Clasificación Internacional de Patentes:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- B25J9/10 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
Países PCT: Bélgica, Alemania, España, Francia, Reino Unido, Italia, Suecia, Oficina Europea de Patentes.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Robot de instalación de revestimiento, en particular robot de manipulación, del 4 de Septiembre de 2019, de Dürr Systems AG: Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil […]
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot, del 22 de Mayo de 2019, de Warein: Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo […]
Dispositivo para el posicionamiento tridimensional de un componente de acoplamiento y sistema de actuadores, del 27 de Marzo de 2019, de AIRBUS HELICOPTERS DEUTSCHLAND GmbH: Dispositivo para el posicionamiento tridimensional de un componente (KK) de acoplamiento que es parte de una estructura (KS) de acoplamiento accionada […]
Seguridad de un robot de carácter humanoide, del 3 de Diciembre de 2018, de Softbank Robotics Europe: Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 23 de Noviembre de 2018, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; […]