18 patentes, modelos y diseños de FUNDACION FATRONIK
Sistema universal de accionamiento háptico.
(18/03/2015) Sistema de accionamiento háptico universal para la rehabilitación del brazo y de la muñeca, que comprende:
- un accesorio de mano que comprende una empuñadura cuya posición es ajustable de acuerdo a una tarea determinada;
- un mango sustancialmente vertical para llevar el accesorio de mano , siendo el mango sustancialmente vertical movible en un plano transversal;
- un sistema accionador háptico basado en cable que tiene dos grados de libertad hápticos para aplicar una fuerza al mango sustancialmente vertical ;
caracterizado porque
- el mango sustancialmente vertical comprende una…
MÉTODO DE MONITORIZACIÓN DE LA FORMACIÓN DE DELAMINACIÓN EN PROCESOS DE TALADRADO DE MATERIALES COMPUESTOS.
(10/12/2012) Método de monitorización de la formación de delaminación en procesos de taladrado de materiales compuestos, que comprende captar, durante el taladrado de cada agujero, señales de emisiones acústicas mediante al menos un sensor que convierte emisiones acústicas en señales de voltaje captadas; definir en base a las señales de voltaje captadas una zona de estudio (ZE) correspondiente a una zona de transición entre una tercera y una cuarta zona (III, IV) de corte; determinar un valor de mínimo relativo (u) y emitir una primera señal de aviso de posible delaminación cuando el valor de mínimo relativo (N) es mayor que un valor de mínimo relativo de referencia (NRef); emitir una señal de aviso de posible delaminación cuando una altitud de pico normalizada (H2) es mayor que una altitud…
DISPOSITIVO DE GARRA PARA MANIPULACIÓN DE ELEMENTOS FLEXIBLES.
(05/07/2012) Dispositivo de garra para manipulación de elementos flexibles, acopiable a un brazo de robot a modo de efector final, que comprende un bastidor principal y una pluralidad de elementos de agarre acoplados en el bastidor principal mediante respectivos mecanismos de accionamiento (1 a-1f; 2a-2e; 3a- 3f; 4a-4g; 5a-5d; 6a-6g; 7a-7f; 8a-8e; 9a-9f) para agarrar un elemento flexible , caracterizado porque comprende al menos cuatro elementos de agarre para agarrar el elemento flexible ; al menos un elemento de agarre es un elemento de agarre multiposición independientemente desplazable, respecto de los demás elementos de agarre , en al menos una dirección paralela al plano definido por los demás elementos de agarre mediante un sistema de desplazamiento montado en el bastidor principal y en una dirección perpendicular (Z) a dicho plano mediante un…
SABLES DE VELA CON ESTABILIDAD MEJORADA.
Sección de la CIP Técnicas industriales diversas y transportes
(12/04/2012). Ver ilustración. Inventor/es: FIMBEL,Eric, BUREAU,Maxime, FUENTES IBARZ,Borja. Clasificación: B63H9/06.
Sable para velas que comprende láminas primera y segunda que soportan una estructura de tipo intercalado interna de material incompresible formada por elementos discontinuos y topes que actúan conjuntamente con los elementos de modo que cuando una fuerza dobla el sable el elemento entra en contacto con el tope, proporcionando de este modo al sable una estabilidad secundaria. Por tanto aumenta la resistencia a la tensión de flexión y el efecto global es la estabilización del sable y la vela a la combadura deseada.
MAQUINA PARA EL CONFORMADO DE CHAPA Y PROCEDIMIENTO DE CONFORMADO.
(09/02/2010) Máquina para el conformado de chapa y procedimiento de conformado.
La máquina comprende medios de sujeción que sujetan una chapa , sustancialmente en su perímetro, una primera herramienta dispuesta en un primer lado de la chapa , dotada de al menos tres grados de libertad, correspondientes a desplazamientos según los ejes X, Y, Z y una segunda herramienta (3'') dispuesta en un lado opuesto al primer lado de la chapa, dotada de al menos dos grados de libertad, correspondientes a desplazamientos según los ejes X e Y. Entre la segunda herramienta (3'') y los medios de sujeción existe un movimiento relativo, según el eje Z
DISPOSITIVO DE CONTROL DE EQUIPOS UNIDIMENSIONALES, BIDIMENSIONALES O TRIDIMENSIONALES PARA LA ASISTENCIA A PERSONAS CON DISCAPACIDAD.
(01/10/2008) Dispositivo de control de equipos unidimensionales, bidimensionales o tridimensionales para la asistenta a personas con discapacidad.#El dispositivo comprende básicamente:#- un módulo transmisor que el usuario puede llevar en su cabeza, integrando un transmisor inalámbrico y un microcontrolador conectado a unos sensores con tecnología de micro fabricación que detectan el movimiento de la cabeza, un giroscopio para los movimientos horizontales y un acelerómetro para los verticales, con los cuales puede controlar un equipo tal como un ordenador o una silla de ruedas ; y#- un módulo receptor a colocar en el equipo, comprendiendo un receptor inalámbrico con un microcontrolador integrado y un microcontrolador externo con interfaz…
Sección de la CIP Técnicas industriales diversas y transportes
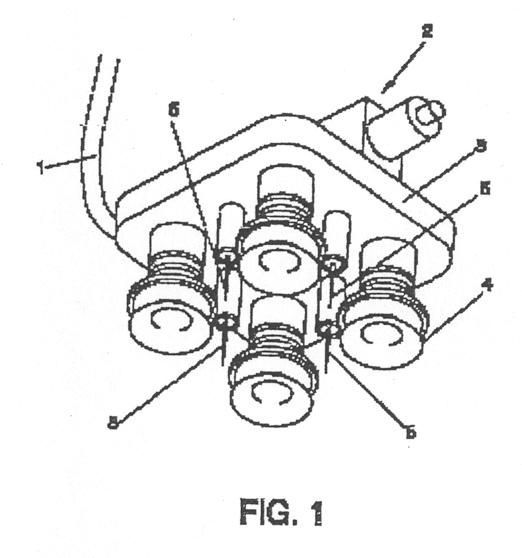
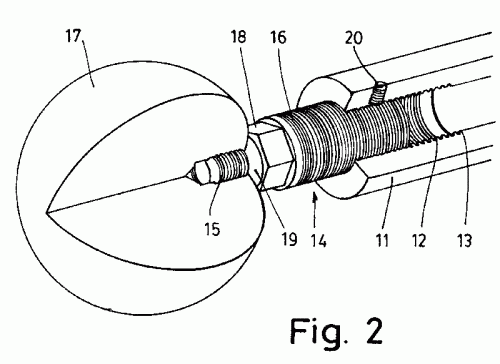
(01/10/2008). Ver ilustración. Inventor/es: SAN MARTIN UGARTE,YON, NABAT,VICENT IVES MIC, PIERROT,FRANCOIS RENE, COMPANY,OLIVIER PHILIPP, SAEZ FERNANDEZ,AGUSTIN JAVIER. Clasificación: B65G47/91.
Dispositivo de agarre.#El dispositivo está concebido para conectarse al extremo de un brazo móvil , para la manipulación robotizada de productos , incluidos aquellos que presentan irregularidades o una capa de hielo en su superficie, los cuales están sujetos a esfuerzos, tanto en dirección perpendicular como tangencial al de la superficie de agarre. El objetivo del dispositivo es asegurar la retención firme del producto en ambas direcciones y garantizar un tiempo corto de respuesta del conjunto. Tiene unos medios de sujeción que comprenden al menos un elemento de succión al vacío capaz de soportar los esfuerzos perpendiculares cuando está pegado al producto y al menos un elemento de perforación que actúa en colaboración con dichos elementos de succión para soportar los esfuerzos tangenciales al penetrar en el mismo producto, sumándose los efectos de succión y los de retención que realizan dichos elementos de perforación para dar estabilidad al agarre.
MAQUINA-HERRAMIENTA ROBOTIZADA PORTATIL.
Sección de la CIP Técnicas industriales diversas y transportes
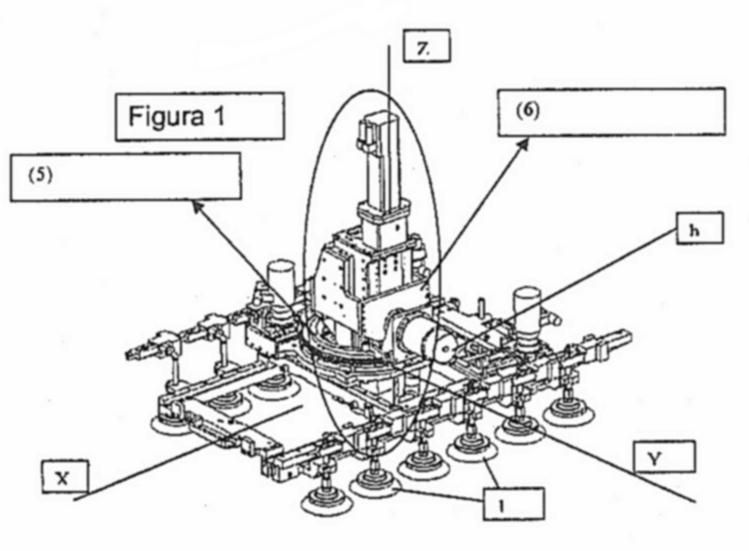
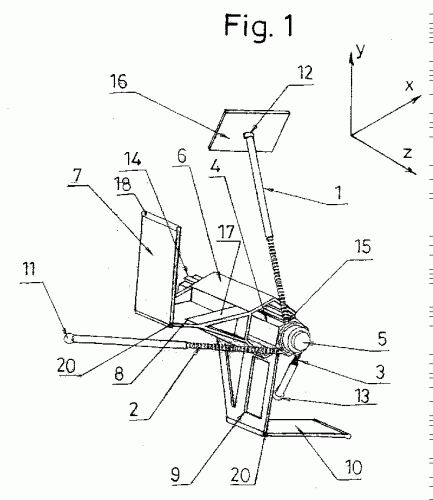
(01/01/2008). Ver ilustración. Inventor/es: COLLADO JIMENEZ, VALENTIN, AZPIAZU ALBERDI,PEDRO, ARANA GARATE,JON. Clasificación: B23Q1/48, B62D57/02, B23Q9/00C5, B23Q9/00.
Máquina-herramienta robotizada portátil, que consta de un bastidor en el que se disponen una serie de ventosas para su fijación sobre una pieza a trabajar; un primer carro que se traslada en el bastidor según el eje X; un segundo carro que se traslada en el primer carro según el eje Y; una plataforma giratoria dispuesta en el segundo carro y que gira sobre el eje Z, siendo X, Y, Z ejes perpendiculares entre sí, dejando un espacio libre (e) pasante a través del bastidor , del primer carro y del segundo carro y de la plataforma giratoria ; un soporte basculante dispuesto sobre la plataforma giratoria y que gira sobre un eje secundario (b) situado en un plano perpendicular al eje Z; un cuarto carro que se traslada respecto al soporte basculante ; y un cabezal montado en el cuarto carro y portador de la herramienta de mecanizado.#De aplicación en máquina-herramienta.
ROBOT PARALELO CON CUATRO GRADOS DE LIBERTAD DE ALTA VELOCIDAD.
Sección de la CIP Técnicas industriales diversas y transportes
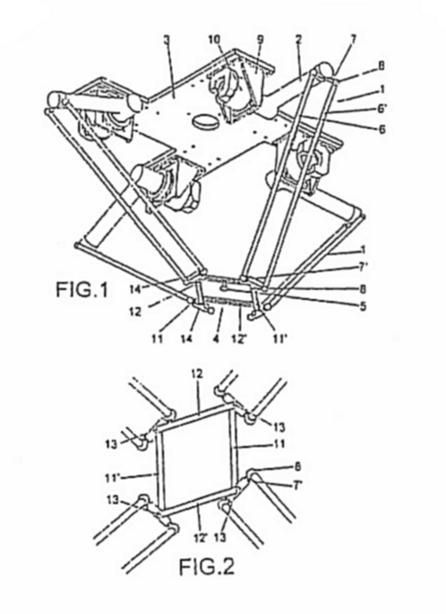
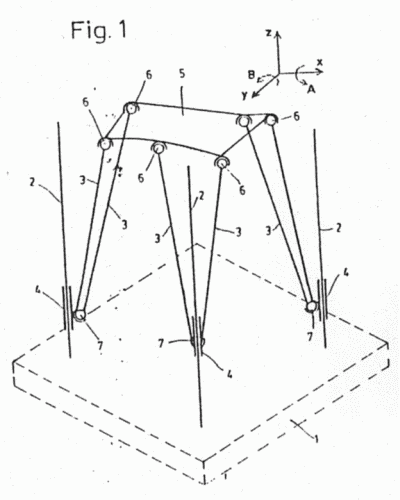
(01/12/2007). Ver ilustración. Inventor/es: BUENO ZABALO,RICARDO, PIERROT,FRANCOIS, RODRIGUEZ MIJANGOS,MARIA DE LA O, AZCOITIA ARTECHE,JOSE MIGUEL, COMPANY,OLIVIER, NABAT,VINCENT, FLORENTINO PEREZ DE ARMENTIA,KARMELE. Clasificación: B25J17/02F2, B25J17/02.
Robot paralelo con cuatro grados de libertad de alta velocidad.#Este robot paralelo comprende cuatro cadenas cinemáticas articuladas por uno de sus extremos a una plataforma móvil que porta la herramienta y por su otro extremo, a través de una junta de rotación , a un actuador solidario de una placa base . La plataforma móvil está constituida por cuatro elementos , (11''), , (12''), unidos entre sí mediante uniones articuladas , siendo al menos dos de los elementos paralelos entre sí, constituyendo una plataforma móvil articulada con un grado de libertad en el plano de la plataforma móvil. Los actuadores están posicionados con cualquier orientación en la placa base y preferentemente a 45º, 135º, 225º y 315º.
METODO DE MONITORIZACION DE LA FORMACION DE REBABAS EN LOS PROCESOS DE TALADRADO DE PIEZAS.
Secciones de la CIP Técnicas industriales diversas y transportes Física
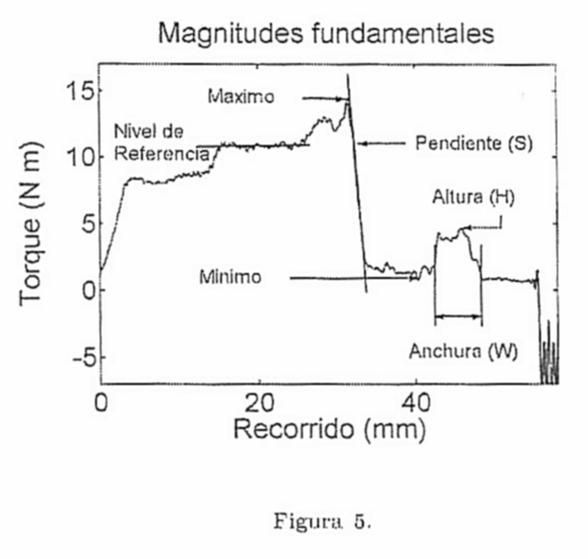
(01/12/2007). Ver ilustración. Inventor/es: PEÑA PELLICER,BEGOA, ARAMENDI LARRAAGA,GORKA, RIVERO RASTRERO,M. ASUNCION. Clasificación: B23Q17/09, G05B19/406, B23B49/00.
Método de monitorización de la formación de rebabas en los procesos de taladrado de piezas, basado en señales internas asociadas al par capturadas del regulador del motor del cabezal para detectar la formación de rebabas no deseadas durante los procesos de taladrado. Se ha demostrado que cinco características de la señal están asociadas a la altura de la rebaba, a la vez que son relativamente insensibles a los parámetros del proceso. Los experimentos se han llevado a cabo sobre aluminio aeronáutico Al 7075-T6 bajo condiciones de alta velocidad. Se ha desarrollado un algoritmo basado en umbrales capaz de distinguir rebabas fuera de los requerimientos con una fiabilidad por encima del 92% para el rango de parámetros probados. Una apropiada implementación de este algoritmo puede utilizarse como un sistema para el control de calidad de las operaciones de taladrado.#De aplicación en aeronáutica.
ROBOT PARALELO DE CUATRO GRADOS DE LIBERTAD CON ROTACION ILIMITADA.
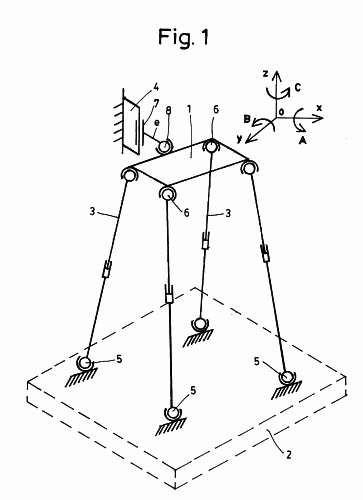
(16/11/2007) Robot paralelo de cuatro grados de libertad.#El robot de la invención, tal y como se observa en la figura 1, está compuesto por dos niveles (I), (II), cada uno de los cuales comprende:#- Dos actuadores , unidos a un soporte o columna fija .#- Dos brazos , , dispuestos en posición horizontal, unidos por uno de sus extremos, a los actuadores , respectivamente.#- Dos brazos , unidos articuladamente, a través de uno de sus extremos, al extremo libre de los brazos , respectivamente, y por su otro extremo, unidos entre sí en un punto , definiendo un paralelogramo articulado.#Cada uno de los puntos se desplaza en un plano horizontal, con dos grados de libertad.#El punto del nivel…
SISTEMA CINEMATICO PARA CABEZAL DE MAQUINA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/02/2007). Ver ilustración. Inventor/es: SAENZ FERNANDEZ,AGUSTIN J., COLLADO GIMENEZ,VALENTIN, GIMENEZ OLAZABAL,MARTA. Clasificación: B23Q1/48, B23Q1/54, B25J17/02.
Sistema cinemático para cabezal de máquina, que consta de una primera plataforma a la que se fijan tres guías de deslizamiento con su deslizadera correspondiente, tres pares de brazos, uniéndose cada brazo por un extremo mediante una junta esférica a una segunda plataforma cabezal y por el otro extremo mediante una junta esférica a una de dichas deslizaderas, uniéndose cada par de brazos a la misma deslizadera en el mismo punto/zona. De aplicación en máquina herramienta.
SISTEMA CINEMATICO PARA CABEZAL DE MAQUINA.
Secciones de la CIP Técnicas industriales diversas y transportes Mecánica, iluminación, calefacción, armamento y voladura
(16/07/2005). Ver ilustración. Inventor/es: SAENZ FERNANDEZ,AGUSTIN J., COLLADO GIMENEZ,VALENTIN, GIMENEZ OLAZABAL,MARTA. Clasificación: B23Q1/54, B25J17/02, F16M11/12.
Sistema cinemático para cabezal de máquina, que consta de una primera plataforma movible según los ejes OX, OY, tres o cuatro brazos de longitud variable que se unen por un extremo mediante juntas a la primera plataforma y por su otro extremo mediante juntas a una segunda plataforma o cabezal, y disponiendo en una estructura, sin movimiento relativo respecto a la primera plataforma, un conjunto guía/deslizadera, según el eje OZ, uniéndose rígidamente a la deslizadera una junta de rotación que a su vez se une a la segunda plataforma, teniendo la junta de rotación dos o tres grados de libertad según se utilicen tres o cuatro brazos respectivamente. De aplicación en máquina herramienta.
SISTEMA CINEMATICO PARA CABEZAL DE MAQUINA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/03/2005). Inventor/es: SAENZ FERNANDEZ,AGUSTIN J., GIMENEZ OLAZABAL,MARTA, COLLADO JIMENEZ, VALENTIN. Clasificación: B23Q1/48, B23Q1/54, B25J17/02, B23Q5/22.
Sistema cinemático para cabezal de máquina, que consta de: a) una primera plataforma a la que se fijan b) tres guías de deslizamiento con su deslizadera correspondiente, c) tres pares de brazos , que tienen una longitud constante, uniéndose cada brazo por un extremo mediante una junta esférica a una segunda plataforma cabezal y por el otro extremo mediante una junta esférica a una de dichas deslizaderas, uniéndose cada par de brazos a la misma deslizadera, caracterizado porque d) los seis brazos no tienen todos la misma longitud.
CELOSIA PARA ESTRUCTURA DE MAQUINA.
Secciones de la CIP Construcciones fijas Mecánica, iluminación, calefacción, armamento y voladura
(01/03/2005). Ver ilustración. Inventor/es: SAENZ FERNANDEZ,AGUSTIN J.. Clasificación: E04B1/19, F16S3/08, F16S3/06.
Celosía para estructura de máquina, de las que constan de una retícula de barras, uniéndose cada barra por cada extremo a un nudo-bola por medio de elementos de unión, estando cada barra roscada por sus extremos, y constando los elementos de unión de un espárrago-conector con un cuerpo y una prolongación coaxial ambos roscados y con rosca del mismo sentido, roscándose dicho cuerpo en la barra y dicha prolongación en el nudo-bola y disponiéndose entre dicho cuerpo y su prolongación de una superficie-tuerca. Aplicable en la fabricación de maquinaria.
MODULO CON MOVIMIENTO CINEMATICO PARALELO DE EJES ORTOGONALES.
Sección de la CIP Técnicas industriales diversas y transportes
(16/12/2003). Ver ilustración. Inventor/es: SAENZ FERNANDEZ,AGUSTIN J., COLLADO JIMENEZ, VALENTIN. Clasificación: B25J17/02.
Módulo con movimiento cinemático paralelo de ejes ortogonales que consta de una estructura fija o bancada, una estructura pasiva con, al menos, una tijera cinemática unida por uno de sus extremos a la estructura fija y por el otro extremo a una estructura móvil plana, siendo articulada una de dichas uniones; y una estructura móvil espacial portadora del cabezal de trabajo y que puede desplazarse linealmente respecto a la estructura móvil plana; y unos brazos con una unión por un extremo a la estructura fija y por el otro extremo con una unión a la estructura móvil espacial, siendo una de las uniones de dos grados de libertad y la otra unión de tres grados de libertad; y medios para accionar el movimiento de los brazos. De aplicación en máquinas herramientas.
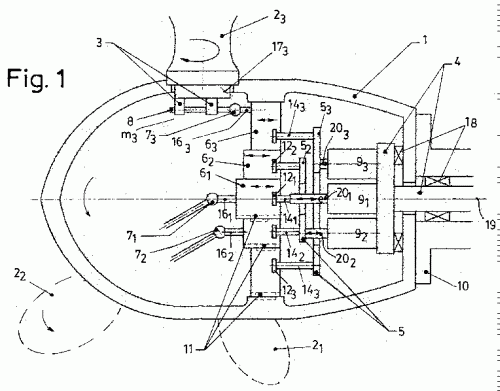
DISPOSITIVO EN ROTORES PARA EL CONTROL INDEPENDIENTE DE LA VARIACION DE PASO DE CADA PALA.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(01/12/2003). Ver ilustración. Inventor/es: AZKOITIA ARTECHE,JOSE MIGUEL, ZULAICA MUNIAIN,JUAN JOSE. Clasificación: F03D7/02.
Dispositivo en rotores para el control independiente de la variación de paso de cada pala, que consta, al menos, de un eje independiente cinemáticamente del rotor , y que porta un actuador por cada pala ; un disco por cada pala, siendo los discos coaxiales al rotor y disponiendo entre sí y entre el disco más exterior y el rotor de medios de deslizamiento que permiten su movimiento longitudinal relativo pero su solidaridad en el giro; medios para transmitir dicho movimiento longitudinal desde el actuador a su disco correspondiente; un multiplicador de par entre cada disco y su pala correspondiente, de modo que dicho movimiento longitudinal del disco se transforme en movimiento de giro de la pala o la parte de ella previamente prefijada. De aplicación en aerogeneradores.
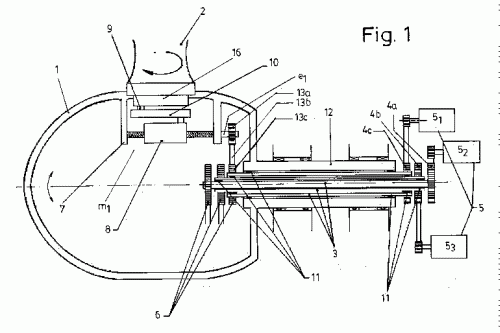
DISPOSITIVO EN ROTORES PARA EL CONTROL INDEPENDIENTE DE LA VARIACION DE PASO DE CADA PALA.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(01/12/2003). Ver ilustración. Inventor/es: AZKOITIA ARTECHE,JOSE MIGUEL, ZULAICA MUNIAIN,JUAN JOSE. Clasificación: F03D7/02.
Dispositivo en rotores para el control independiente de la variación de paso de cada pala, en el que por cada pala del rotor consta de un elemento motriz , dispuesto en una zona libre de giro que acciona un eje de accionamiento interior, coaxial e independiente del eje rotor que penetra en la cabeza del rotor , siendo tanto el elemento motriz como la cadena cinemática independientes del giro del eje rotor ; un multiplicador de par (m) solidario en giro de la cabeza del rotor que recibiendo el movimiento del eje de accionamiento lo transforma en movimiento de giro de la pala o la parte de ella previamente prefijada. De aplicación en aerogeneradores.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}