CIP-2021 : A61B 34/30 : Robots quirúrgicos.
CIP-2021 › A › A61 › A61B › A61B 34/00 › A61B 34/30[1] › Robots quirúrgicos.
Notas[t] desde A61 hasta A63: SALUD; SALVAMENTO; DIVERSIONES
A NECESIDADES CORRIENTES DE LA VIDA.
A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE.
A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48).
A61B 34/00 Cirugía asistida por ordenador; Operadores o robots adaptados de forma especial para su uso en cirugía.
A61B 34/30 · Robots quirúrgicos.
CIP2021: Invenciones publicadas en esta sección.
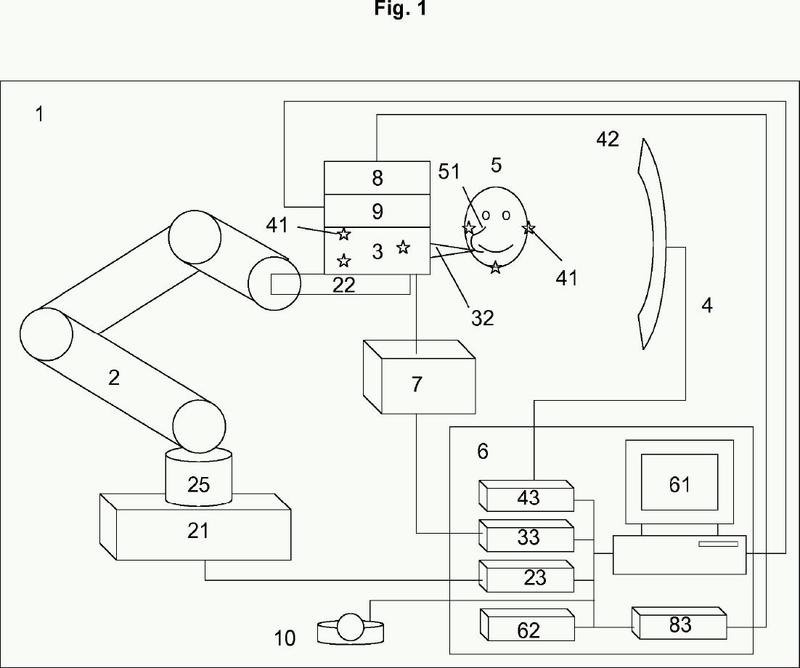
Calibrador especial de imagen 3D, sistema y método de localización quirúrgica.
(22/07/2020) Un sistema de posicionamiento quirúrgico, en el que el sistema de posicionamiento quirúrgico comprende un robot quirúrgico , una computadora host, un observador de dispositivos de medición espacial , un rastreador de robots , un rastreador de pacientes , un dispositivo de formación de imágenes 3D , y un calibrador para imagen 3D que comprende un plano calibrador y un mango de calibrador , en el que el plano calibrador es plano o en forma de arco, y al menos cuatro puntos marcados para ser identificados por el dispositivo de formación de imágenes 3D están dispuestos en el plano calibrador ; y un extremo del mango del calibrador está conectado…
Posicionador de herramienta articulado y sistema que emplea mismo.
(24/06/2020) Un aparato de herramienta quirúrgica que comprende:
un aparato efector final que comprende:
un efector final que tiene una base , en donde la base comprende un acoplador cilíndrico ;
un conducto que tiene un extremo distal acoplado al acoplador cilíndrico y una porción flexible en el extremo distal; y un enlace de control que se extiende axialmente a través del conducto y la base y que tiene un extremo distal acoplado al efector final , el enlace de control que tiene una porción flexible en el extremo distal, en donde el enlace de control se puede mover a lo largo del conducto y está acoplado a una mordaza giratoria del efector final para provocar…
Sistema robótico quirúrgico con carro y unidad manipuladora.
(17/06/2020) Sistema robótico quirúrgico, que comprende:
- una estructura de suspensión que comprende un carril ;
- una unidad manipuladora que comprende:
- un carro dispuesto para montarse en la estructura de suspensión, en el que el carro comprende un actuador eléctrico para el movimiento del carro a lo largo del carril; y
- un brazo manipulador dispuesto para acoplarse de manera desmontable al carro mediante un mecanismo de acoplamiento;
- comprendiendo el mecanismo de acoplamiento un primer conector de acoplamiento en el brazo manipulador y un segundo conector de acoplamiento en el carro, en el que el primer y el segundo conector de acoplamiento establecen una conexión eléctrica entre el brazo manipulador y el carro cuando el brazo manipulador…
Sistema robótico quirúrgico de control híbrido.
(29/04/2020) Un sistema robótico quirúrgico, que comprende:
al menos un brazo robótico ;
al menos un sensor ;
un conjunto de control ; un mando ; donde: el al menos un sensor está configurado para detectar una entrada o una condición operativa del al menos un brazo robótico; y
el mando está configurado para poder unirse y separarse del al menos un brazo robótico; y el conjunto de control está configurado para procesar la entrada o la condición, y para operar al menos un brazo robótico en una pluralidad de modos de operación,
donde el conjunto de control ejecuta comandos para el al menos un brazo robótico, a fin de compartir un espacio de trabajo y los elementos quirúrgicos ;
donde los elementos quirúrgicos incluyen al menos una herramienta quirúrgica…
Robot, particularmente para cirugía mínimamente invasiva a través de una única incisión parietal o un orificio natural.
(29/04/2020) Robot , particularmente para cirugía mínimamente invasiva a través de una única incisión parietal y/u orificio natural, que comprende:
- por lo menos un cuerpo de recipiente ;
- una pluralidad de instrumentos de operación alojados en dicho por lo menos un cuerpo de recipiente;
- por lo menos un soporte articulado , que comprende una pluralidad de cuerpos rígidos que están mutuamente asociados;
- unos medios de rigidización , que están asociados con dicho soporte articulado y están adaptados para la transición de dicho soporte articulado desde una configuración inactiva, en la que dichos cuerpos rígidos pueden moverse unos con respecto…
Conjunto de cánulas para procedimientos quirúrgicos laparoscópicos con presión regulada y con asistencia robótica.
(15/04/2020). Solicitante/s: CONMED CORPORATION. Inventor/es: BLIER,KENNETH, MASTRI,DOMINICK, AUGELLI,MICHAEL J.
Un conjunto de cánulas para su uso en la cirugía laparoscópica asistida por robot, que comprende: a) un conjunto adaptador configurado para su recepción dentro de un extremo abierto de una porción de carcasa proximal de una cánula robótica y que incluye un cuerpo tubular con un paso central que soporta un sello primario ; y b) un tubo de inserción dimensionado y configurado para extenderse a través del paso central del cuerpo tubular del conjunto adaptador y una porción tubular de la porción de cánula robótica , el tubo de inserción que incluye una tapa superior con un puerto de acceso que sostiene un sello secundario, en el que el conjunto adaptador incluye una carcasa superior para sostener el sello primario dentro del paso central del cuerpo tubular del conjunto adaptador , caracterizado por que un puerto de entrada se extiende desde la carcasa superior del conjunto adaptador para conectar el conjunto adaptador a un tubo de suministro de gas.
PDF original: ES-2806951_T3.pdf
Dispositivo y sistema que incluyen brazos mecánicos.
(15/04/2020) Un dispositivo quirúrgico médico dimensionado y conformado para su inserción en un cuerpo que comprende: al menos una extremidad mecánica alargada que incluye un extremo proximal y distal que comprende:
un segmento de soporte ;
un primer segmento que se extiende desde dicho segmento de soporte, definiendo dicho primer segmento un primer pasaje hueco de segmento en el mismo que termina en una primera sección de conexión que incluye una primera articulación ; formada dicha primera articulación por una pila de una pluralidad de enlaces , comprendiendo cada enlace un espacio de aire ;
un segundo segmento que se extiende desde dicha primera sección de conexión y que termina en una herramienta o un conector para una…
Sistema quirúrgico electromecánico.
(25/12/2019) Un sistema quirúrgico , que comprende:
uno o más brazos electromecánicos que se pueden acoplar a un dispositivo de fijación;
una o más herramientas electromecánicas soportadas por uno o más brazos electromecánicos para definir uno o más conjuntos de brazos y herramientas electromecánicos;
un sistema de control electrónico configurado para comunicarse electrónicamente con uno o más conjuntos de brazos y herramientas electromecánicos, estando el sistema de control configurado para controlar el funcionamiento de uno o más conjuntos de brazos y herramientas electromecánicos;
uno o más controladores portátiles manuales que se pueden accionar para comunicar una o más señales de control…
Dispositivo de tratamiento de emergencia de una parada cardíaca.
(20/11/2019) Un dispositivo de despliegue vascular automatizado, que comprende un medio para la detección de vasos sanguíneos y un medio para la introducción de un catéter en un vaso sanguíneo, tal como una arteria o vena, en el que el medio para la introducción del catéter comprende
1) un medio para el movimiento lateral motorizado de una cánula o aguja percutánea,
2) un medio para la introducción motorizada de la cánula o aguja percutánea en una arteria o una vena por medio de un movimiento axial longitudinal de dicha cánula o aguja, y
3) un medio para la introducción motorizada del catéter en una arteria o una vena mediante o a través…
Microrrobot médico y sistema de microrrobot que tiene el mismo.
(11/11/2019) Un microrrobot que comprende:
un cuerpo de perforación que tiene una punta de perforación formada en un extremo del mismo;
un cuerpo de acoplamiento en espiral que tiene un imán dispuesto en él y se acopla en espiral a una circunferencia exterior del cuerpo de perforación ; y
una unidad de control del sistema que permite que el cuerpo de perforación y el cuerpo de acoplamiento en espiral se muevan en espiral simultáneamente o permite que el cuerpo de acoplamiento en espiral se mueva en forma de espiral alrededor del cuerpo de perforación al proporcionar un campo magnético giratorio al imán, y
donde una protrusión en espiral , que se acopla en forma de espiral al cuerpo de acoplamiento en espiral , se forma en la circunferencia exterior del cuerpo de perforación ,
caracterizado porque en…
Un aparato para biopsia y terapia.
(09/10/2019) Un dispositivo de biopsia y terapia , que comprende:
una unidad de punción para sujetar e insertar una aguja de biopsia;
un módulo de formación de imágenes , que comprende una sonda de ultrasonido y un actuador para mover la sonda en una acción recíproca;
el módulo de formación de imágenes incluye una funda de sonda , colocada sobre dicha sonda y dispuesta para permitir un movimiento recíproco relativo con dicha sonda ;
caracterizado por que el dispositivo comprende adicionalmente:
una primera corredera arqueada ;
una segunda corredera arqueada , que engancha deslizantemente con la primera corredera arqueada , y un…
Sistemas de instrumentos robóticos que utilizan sensores de fibra óptica.
(09/10/2019) Un sistema que comprende:
un cuerpo de instrumento alargado ;
un sensor de fibra óptica acoplado al cuerpo de instrumento alargado y que forma un sensor de deformación, comprendiendo el sensor de fibra óptica un núcleo que incluye rejillas de Bragg de fibra;
y un sistema para calibrar dicho sensor de fibra óptica asociado con dicho cuerpo de instrumento alargado de un instrumento alargado, que comprende:
un útil de calibración configurado para posicionar el cuerpo de instrumento alargado en una configuración geométrica conocida; en el que dicho útil de calibración tiene una ranura en la que el cuerpo de instrumento alargado y el sensor de fibra óptica pueden colocarse…
Manejo sin contacto de estación de trabajo del instrumento de ablación mediante el uso de sensores de profundidad.
(25/09/2019) Un sistema para el manejo sin contacto de una estación de trabajo del instrumento de ablación que comprende:
un sensor de profundidad para detectar un movimiento;
un módulo de software de movimiento operable para recibir el movimiento detectado desde el sensor de profundidad , deducir un gesto en base al movimiento detectado; y
un módulo de software de cliente operable para recibir el gesto aplicable en un ordenador cliente en la estación de trabajo del instrumento de ablación para realizar una tarea de acuerdo con la lógica del cliente en base al gesto aplicable,
caracterizado porque el módulo de software de cliente es operable para permitir que un usuario específico controle dicha tarea…
Dispositivo para el posicionamiento de instrumentos estériles.
(25/09/2019) Dispositivo para el posicionamiento de instrumentos estériles, en particular de agujas de punción, agujas de inyección o sondas de operación, en un paciente, con una envoltura estéril al menos sobre su lado interior y el instrumento estéril , en el que la envoltura envuelve, al menos parcialmente, el instrumento estéril , y con al menos un orificio de paso hermético al gas colocado en la envoltura , en el que el instrumento estéril presenta al menos un soporte de fijación de instrumentos estéril (2'), que está guiado a través del orificio de paso hacia piezas de acoplamiento y a través del movimiento del soporte de fijación…
Instrumentos, sistemas y métodos para mejorar el trasplante capilar.
(25/09/2019) Aparato caracterizado porque comprende:
un primer cartucho (205; 305a, 305b; 900; 1000; 1210) que tiene al menos una primera característica de indexación y que comprende una primera pluralidad de receptáculos con una separación predeterminada entre los mismos, estando cada receptáculo dimensionado y configurado para retener una unidad biológica;
un segundo cartucho (205; 305a, 305b; 900; 1000; 1210) que tiene al menos una segunda característica de indexación y que comprende una segunda pluralidad de receptáculos con la separación predeterminada entre los mismos, estando cada receptáculo dimensionado y configurado para retener una unidad biológica;
…
Instrumento, en particular un instrumento médico-endoscópico o tecnoscopio.
(28/08/2019) Instrumento de vástago, en particular instrumento médico-endoscópico o tecnoscopio, con un vástago y con un cabezal del instrumento, el cual presenta al menos una parte articulada de forma acodable en el extremo distal del vástago y un portaherramientas articulado de forma acodable en la parte articulada en el plano de acodamiento de la parte articulada , en donde junto al extremo proximal de la parte articulada está configurado un dentado que engrana con un cuerpo dentado apoyado de forma giratoria en el vástago y acoplado para movimiento con un par de cables Bowden para el control del movimiento del cabezal del instrumento, caracterizado por que el cuerpo dentado está dividido en dos partes transversalmente a su eje de giro, en donde las dos partes del cuerpo dentado pueden ser giradas una con relación a otra,…
Grapadora quirúrgica con articulación universal y sujeción previa de tejidos.
(07/08/2019) Una grapadora quirúrgica que comprende: un conjunto de accionamiento robótico, un eje alargado en donde un extremo proximal del eje alargado se asocia con el conjunto de accionamiento robótico, y un conjunto de herramienta conectado de manera operativa a un extremo distal del eje alargado, comprendiendo el conjunto de herramienta:
un conjunto de yunque que tiene una superficie inferior (114b);
un conjunto de canal ;
un conjunto de cartucho que monta mecánicamente a dicho conjunto de canal, incluyendo dicho cartucho de grapas una pluralidad de grapas dispuestas en el mismo y una superficie de contacto del tejido superior ;
un patín movible a través del cartucho de grapas desde una primera posición a una posición posterior para forzar de manera operativa que dicha pluralidad de grapas de dicho cartucho…
Catéter de dilatación del seno frontal.
(07/08/2019) Sistema de catéter con balón para dilatar el tracto de salida de una cavidad sinusal que comprende: un dispositivo que comprende:
un miembro de guía interior metálico que presenta un extremo proximal , un extremo distal y
un lumen , que se extiende a lo largo de una longitud del mismo y termina en el extremo distal ;
un eje acoplado a un balón , el eje tiene un primer lumen a lo largo de al menos una porción del mismo que contiene el miembro de guía interior metálico , el eje y el balón , que están colocados de forma deslizante sobre el miembro de guía interior metálico , el eje tiene un segundo lumen acoplado operativamente al interior del balón ;…
Osteotomo de láser asistido por ordenador y guiado por robot.
(31/07/2019). Ver ilustración. Solicitante/s: Advanced Osteotomy Tools - AOT AG. Inventor/es: BRUNO,ALFREDO E, ZEILHOFER,HANS-FLORIAN, JÜRGENS,PHILIPP.
Osteotomo de láser asistido por ordenador y guiado por robot que comprende un brazo robótico ,
una fuente láser de fotoablación de estado sólido montada en el brazo robótico ,
un sistema de seguimiento automático de láser de fotoablación de paciente dedicado , y
una consola de ordenador para controlar la fuente láser de fotoablación ,
un sistema de control de bucle cerrado para detener la fuente láser que envía unos impulsos de láser en una superficie de separación de tejido duro-blando cuando un hueso es atravesado completamente, caracterizado por que el sistema de control de bucle cerrado presenta un sensor óptico que comprende unos medios de evaluación del color.
PDF original: ES-2751665_T3.pdf
Dispositivo de asistencia al posicionamiento de un instrumento médico con respecto a un órgano interno de un paciente.
(29/05/2019) Dispositivo de asistencia al posicionamiento de un instrumento médico insertado en una vía natural o en una vía artificial de un paciente con respecto a un órgano interno (P) de un paciente, incluyendo el dispositivo:
- un soporte destinado a ser insertado al menos en parte en el cuerpo del paciente y que lleva el instrumento médico;
- medios de desplazamiento del soporte, incluyendo dichos medios de desplazamiento un brazo articulado que comprende una pluralidad de grados de libertad para desplazar un extremo proximal (1a) del soporte;
- medios de adquisición de imágenes del órgano interno para posicionar el instrumento médico con respecto al órgano interno,…
Dispositivo de tratamiento de emergencia de una parada cardíaca.
(01/05/2019) Un dispositivo para proporcionar reanimación o estado suspendido a través de la redistribución del gasto cardíaco para aumentar el suministro al cerebro y al corazón de un paciente, comprendiendo el dispositivo
• un componente de redistribución controlable eléctrica o manualmente en la forma de un catéter acoplable al paciente y configurado para interactuar con el paciente para proporcionar una redistribución del gasto cardíaco para aumentar el suministro al cerebro y al corazón, siguiendo el componente de redistribución un patrón de reacción predefinido en función de una señal eléctrica,
• medios informáticos configurados para 1) recibir datos del paciente que identifican las características fisiológicas y/o…
Sistema de robot/instrumento quirúrgico.
(01/05/2019) Un sistema de robot/instrumento quirúrgico que comprende un trocar que está diseñado para recibir un instrumento quirúrgico y un brazo de sujeción cuya porción del extremo distal tiene un dispositivo de agarre o sujeción dispuesto en el mismo, estando diseñado este último para sujetar exclusivamente el trocar de una manera intercambiable, y el instrumento quirúrgico preferentemente con un diseño mínimamente invasivo y que comprende un árbol del instrumento cuya porción del extremo distal sostiene una punta del instrumento a través de una junta, soportando o formando dicha punta del instrumento un efector del instrumento quirúrgico, en donde el sistema de robot/instrumento quirúrgico comprende un número de actuadores o unidades de accionamiento mediante los cuales se pueden efectuar…
Sistemas para recolectar, almacenar e implantar injertos de cabello.
(27/03/2019) Un dispositivo para implantar unidades biológicas en tejido, que comprende:
un sistema robótico que tiene un brazo robótico y uno o más mecanismos de control;
una herramienta de implantación que tiene un lumen a su través, estando la herramienta de implantación conectada y manipulada por el brazo robótico; y
un cartucho que tiene una pluralidad de receptáculos cada uno dimensionado y configurado para retener una unidad biológica,
en donde el uno o más mecanismos de control están configurados para alinear automáticamente un receptáculo de cartucho seleccionado con el lumen de la herramienta de implantación…
Celdas de carga en un accionamiento de instrumento.
(27/02/2019) Una unidad de accionamiento para proporcionar el accionamiento desde un brazo de robot hasta un instrumento, comprendiendo la unidad de accionamiento :
una pluralidad de elementos de accionamiento para acoplarse a elementos correspondientes del instrumento, siendo móvil cada elemento de accionamiento a lo largo de un eje de accionamiento y siendo los ejes de accionamiento de cada uno de los elementos de accionamiento sustancialmente paralelos entre sí; y
una estructura de celda de carga que comprende una pluralidad de cuerpos desviables (65a,b,c) acoplados a los elementos de accionamiento para detectar carga en los elementos de accionamiento en paralelo a sus ejes de accionamiento, y un armazón que comprende…
Dispositivo de movimiento, así como sistema para la limpieza de instrumentos médicos.
(09/01/2019) Dispositivo de movimiento que comprende
- un adaptador para el acoplamiento de al menos un instrumento médico , donde
- el adaptador comprende al menos un elemento de acoplamiento que puede ser movido mediante un accionamiento, estando configurado el elemento de acoplamiento de tal manera que en caso de acoplamiento del dispositivo médico , al menos una zona del dispositivo médico puede ponerse en movimiento a través del movimiento del elemento de acoplamiento, donde
- la transmisión de fuerza entre el accionamiento y el elemento de acoplamiento se produce sin contacto, y están previstos varios elementos de acoplamiento en un adaptador,
siendo el al menos un instrumento médico un instrumento endoscópico con al menos una parte…
Soporte de instrumento médico.
(03/01/2019). Solicitante/s: Thys, Tom. Inventor/es: THYS,TOM, THYS,ANDRÉ, THYS,ANDY.
Un soporte de instrumento médico
- el cual debe combinarse con un objeto externo que se mueve alrededor de un centro de movimiento remoto ; y
- que tiene un primer miembro orientado en línea con un eje con su origen en el centro de movimiento remoto de dicho objeto ;
- que tiene un segundo miembro el cual se conecta por medio de un conector giratorio al primer miembro en un extremo y tiene medios de acoplamiento para sostener dicho objeto externo en el otro extremo; y en donde
- el primer miembro se configura para permitir un desplazamiento longitudinal y circunferencial del conector giratorio a lo largo de dicho eje del primer miembro , para permitir que dicho objeto externo se mueva alrededor de dicho centro de movimiento remoto.
PDF original: ES-2695274_T3.pdf
Sistemas y métodos automatizados para recolectar e implantar unidades foliculares.
(19/12/2018). Solicitante/s: Restoration Robotics, Inc. Inventor/es: GILDENBERG, PHILIP L., BODDULURI,Mohan, CADDES,DONALD E, HSEI,PAUL K.
Un método para alinear una herramienta colocada en un brazo móvil de un sistema automatizado con una ubicación o un objeto de interés en un paciente, que comprende:
determinar una relación fija entre la herramienta colocada en el brazo móvil y al menos dos cámaras colocadas en el brazo móvil, en donde la herramienta es capaz de manipular tejido;
seleccionar una ubicación o un objeto de interés en un paciente;
identificar los desplazamientos de posición de la ubicación o el objeto de interés desde al menos dos cámaras ;
mover automáticamente el brazo móvil para alinear la herramienta con la ubicación o el objeto de interés en el paciente basado, al menos en parte, en los desplazamientos identificados y en el mantenimiento mientras se alinea la herramienta en la relación fija entre las al menos dos cámaras y la herramienta.
PDF original: ES-2694293_T3.pdf
Sistema quirúrgico robotizado con control mejorado.
(04/12/2018) Sistema quirúrgico robotizado que comprende al menos un brazo robótico que actúa bajo el control de una consola de control que está destinada para el cirujano, en el que a) la consola comprende un sistema de seguimiento ocular para detectar la dirección de la mirada del cirujano y para introducir órdenes dependiendo de las direcciones de la mirada detectadas; b) la consola comprende una pantalla con al menos una zona para visualizar el campo operatorio y una interfaz hombremáquina que presenta visualmente en la pantalla las áreas de selección que están asociadas con las órdenes; c) el sistema de seguimiento estima la dirección…
Asistente robótico para la inserción de catéter.
(29/11/2018). Solicitante/s: Biosense Webster (Israel), Ltd. Inventor/es: GOVARI, ASSAF, BEECKLER,CHRISTOPHER THOMAS.
Un aparato para ayudar a controlar el movimiento de una sonda invasiva en relación con una funda que encierra la sonda , el aparato comprendiendo:
una carcasa exterior , conectada de manera fija a la funda y configurada para ser fijada temporalmente a un paciente mediante sutura; y
un mecanismo de accionamiento , conectado de manera fija a la carcasa exterior, el mecanismo de accionamiento comprendiendo:
un primer conjunto de componentes, configurado para trasladar la sonda a lo largo de una dirección paralela a un eje de la sonda, para avanzar y retraer la sonda con respecto a la funda de una manera escalonada de traslación; y un segundo conjunto de componentes, configurado para rotar la sonda alrededor del eje de la sonda, para rotar la sonda en sentido de las agujas del reloj y en sentido contrario a las agujas del reloj, con respecto a la funda , de una manera escalonada rotacional.
PDF original: ES-2691868_T3.pdf
Dispositivo médico orientable.
(16/11/2018). Solicitante/s: Human Extensions Ltd. Inventor/es: SHOLEV,MORDEHAI.
Dispositivo médico que comprende:
un cuerpo de dispositivo alargado que incluye una parte orientable que puede orientarse dentro de un cuerpo de un sujeto a través de por lo menos un cable de control; y
una pluralidad de guías de cables de control dispuestas a lo largo de dicho cuerpo de dispositivo alargado, caracterizado por el hecho de que
dichas guías de cables son desplegables para moverse radialmente hacia afuera y desviar dicho por lo menos un cable de control alejándose de dicho cuerpo de dispositivo alargado, en el que la desviación de dicho por lo menos un cable de control alejándose de dicho cuerpo alargado disminuye una fuerza de tracción requerida para orientar dicha parte orientable y desplaza un eje longitudinal de dicho por lo menos un cable de control desde un eje de desviación de dicha parte orientable.
PDF original: ES-2689868_T3.pdf
ROBOT QUIRÚRGICO PARA INTERVENCIONES ORTOPÉDICAS.
(15/11/2018). Solicitante/s: CYBER SURGERY, S.L. Inventor/es: PRESA ALONSO,JORGE, URZAINQUI GLARIA,ALFONSO, OÑATIVIA BRAVO,Jon, ESCUDERO MARTÍNEZ DE IBARRETA,Álvaro, SÁNCHEZ TAPIA,Emilio.
Robot quirúrgico para rastrear y compensar el movimiento óseo, comprendiendo el robot: un brazo de robot y una guía de herramienta en el extremo actuador del brazo, un rastreador fijado al brazo de robot en el mismo plano que la guía de herramienta, comprendiendo el rastreador un conjunto de segmentos articulados (1a-1d) y codificadores asociados a los segmentos de tal manera que el movimiento del rastreador se permite y se controla en al menos seis grados de libertad. La base del rastreador y la guía de herramienta comparten el mismo armazón, es decir, están en el mismo plano, de modo que el sistema es capaz de determinar directamente la colocación exacta de la guía de herramienta con respecto al hueso rastreado sin ningún dispositivo intermedio. De esta manera, se puede prescindir de un rastreador óptico y de las cámaras asociadas.
Sistema robótico médico con brazo manipulador del tipo de coordenadas cilíndricas.
(08/11/2018) Sistema robótico médico para llevar a cabo procedimientos médicos, que comprende un manipulador de robot para la manipulación asistida por robot de un instrumento médico , en el que dicho manipulador de robot comprende:
una base ;
un brazo de manipulador, que tiene una parte esencialmente vertical soportada por dicha base y una parte esencialmente horizontal soportada por dicha parte vertical;
una muñeca de manipulador, soportada por dicho brazo del manipulador; y
una unidad efectora , soportada por dicha muñeca del manipulador y configurada para sujetar un instrumento médico;
dicho brazo del manipulador tiene una configuración cinemática PRP cilíndrica, que tiene, en secuencia…
{kind=link}