Dispositivo para el posicionamiento de instrumentos estériles.
Dispositivo para el posicionamiento de instrumentos estériles,
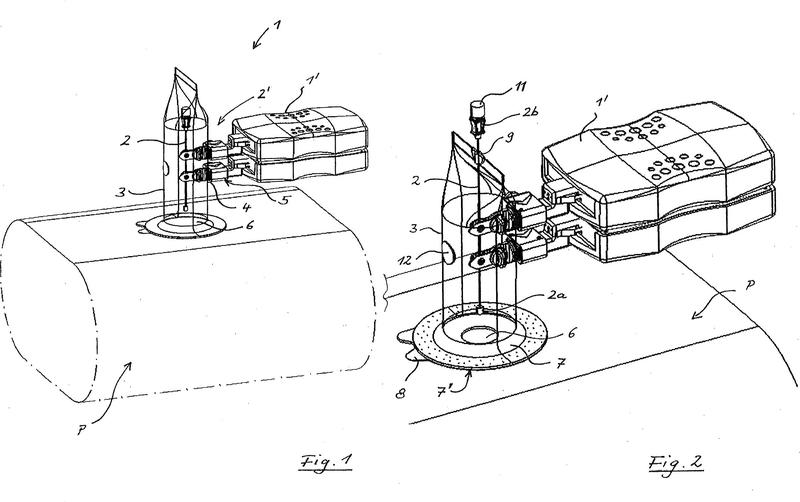
en particular de agujas de punción, agujas de inyección o sondas de operación, en un paciente, con una envoltura (3) estéril al menos sobre su lado interior y el instrumento estéril (2), en el que la envoltura (3) envuelve, al menos parcialmente, el instrumento estéril (2), y con al menos un orificio de paso (4) hermético al gas colocado en la envoltura (3), en el que el instrumento estéril (2) presenta al menos un soporte de fijación de instrumentos estéril (2'), que está guiado a través del orificio de paso (4) hacia piezas de acoplamiento (5) y a través del movimiento del soporte de fijación de los instrumentos (20) se puede mover fuera de la envoltura (3) de manera controlada en al menos dos direcciones espaciales, caracterizado porque la envoltura (3) presenta hacia el paciente (P) una superficie adhesiva (7') en forma de anillo, con la que se puede fijar la envoltura (3) junto con el instrumento (2) de forma hermética al gas en el lugar de intervención
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2016/000722.
Solicitante: Isys Medizintechnik GmbH.
Nacionalidad solicitante: Austria.
Dirección: Bergwerksweg 21 6370 Kitzbühel AUSTRIA.
Inventor/es: VOGELE,MICHAEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B34/30 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 34/00 Cirugía asistida por ordenador; Operadores o robots adaptados de forma especial para su uso en cirugía. › Robots quirúrgicos.
- A61B46/10 A61B […] › A61B 46/00 Gasas estériles. › especialmente adaptadas para instrumentos.
- A61B90/40 A61B […] › A61B 90/00 Instrumentos, utensilios o accesorios especialmente adaptados para cirugía o diagnóstico no cubiertos por alguno de los grupos A61B 1/00 - A61B 50/00, p. ej. para el tratamiento de luxaciones o para proteger los bordes de las heridas (máscaras faciales protectoras A41D 13/11; batas o ropa de cirujanos o 'pacientes' A41D 13/12; dispositivos para extraer, tratar o transportar los líquidos corporales A61M 1/00). › Aparatos fijos o próximos a los pacientes adaptados especialmente para proporcionar un entorno quirúrgico aséptico.
PDF original: ES-2754578_T3.pdf

Fragmento de la descripción:
Dispositivo para el posicionamiento de instrumentos estériles
La invención se refiere a un dispositivo para el posicionamiento de instrumentos estériles de acuerdo con las características del preámbulo de la reivindicación 1, en particular para el movimiento controlado para una intervención operativa asistida por robot en un entorno estéril creado alrededor de un lugar de intervención.
En intervenciones médicas, la atmósfera estéril alrededor del lugar del cuerpo o del lugar de la piel del paciente a tratar tiene una gran importancia para evitar infecciones. Por este motivo, en hospitales y en particular en las salas de tratamiento hay que tener en cuenta siempre una alta norma con respecto a la esterilidad, que se aplica tanto para los pacientes, el personal que realiza el tratamiento y los instrumentos o bien aparatos utilizados. Especialmente en el caso de intervenciones invasivas mínimas o micro-invasivas, como por ejemplo en una punción percutánea con aguja, la superficie del cuerpo tratada operativamente es muy pequeña y en parte incluso está limitada al punto de punción respectivo. También en el caso de emplazamientos múltiples de agujas o de instrumentos, la esterilidad exigida es necesaria sobre todo en el entorno limitado localmente de la abertura resultante de la piel.
En el caso de una pluralidad de intervención es quirúrgicas, es ventajosa la utilización de un robot de mando a distancia. De esta manera, se emplean robots de cirugía durante la punción a menudo junto con aparatos, que calculan a través de radiación electromagnética la posición exacta de punción en el paciente y la profundidad correcta de la punción, por ejemplo con aparatos radiológicos. Debido a la radiación radiológica nociva para la salud, el tratamiento no se puede realizar manualmente a través de una persona, sin que la persona que realiza el tratamiento sea expuesta a la radiación durante más tiempo que el conveniente por razones de seguridad. Además, el estrechamiento espacial, que se produce a través del aparato radiológico, dificulta una intervención manual en el paciente. Además, los robots y los micromanipuladores exceden claramente a la mano humana en el posicionamiento de alta precisión de los instrumentos en espacio-3D. Por éste y otros motivos, se emplean cada vez más robots y telemanipuladores, por ejemplo para controlar de manera selectiva la posición de intervención y objetiva determinada a través del aparato radiológico en el paciente con el instrumento de intervención quirúrgica, pero también para posibilitar ya una intervención de alta precisión (microquirúrgica) en el paciente. Los robots quirúrgicos, que permiten una introducción y manipulación de agujas y de (micro) instrumentos del tipo de agujas así como de (micro) aparatos terapéuticos y diagnósticos son, por lo tanto, especialmente adecuados para la aplicación con procedimientos de formación de imágenes (como CT, Arco-C, rayos-X, MRT, ultrasonido, et.) debido al tamaño relativamente reducido de los robots y a la limitación local del lugar a tratar.
Para posibilitar un emplazamiento exacto del instrumento de intervención en la formación de la imagen con procesamiento siguiente de la imagen del lugar determinado, la distancia de los soportes de fijación del robot con respecto a la aguja debería mantenerse lo más reducida posibles, lo que implica, sin embargo, el peligro de una contaminación de la herida resultante a través del robot.
Tales robots, que pueden realizar punciones exactas controladas a distancia en un paciente, se describen, por ejemplo, en los documentos EP 1722698 B1 o US-A-5 176689. Para proteger la aguja y el lugar de la punción contra posibles contaminaciones que proceden del robot, ya se han propuesto diferentes posibilidades para cubrir el robot o partes del mismo. La aguja se mueve entonces, separada de la protección del robot, en el espacio aproximadamente con la esterilidad que existe en el espacio de tratamiento. Tales ejemplos de dispositivos de protección instalados en el robot se muestran en los documentos US 2006/0235436 A1 o WO 2014/127984 A1. Estas realizaciones tienen el inconveniente de que al menos partes del robot deben cubrirse de manera hermética al aire, lo que representa un procedimiento intensivo de tiempo.
Se conoce a partir del documento WO 2010/121107 A1 un manipulador quirúrgico, que puede ser envasado estéril en general (de manera similar también al documento US-A-6 132368) y se puede controlar sin cables desde fuera del envase estéril. En el lado exterior del envase estéril del manipulador se coloca el instrumento quirúrgico. Esta disposición permite una alta cota de esterilidad del manipulador, pero tiene los inconvenientes de que para la manipulación del instrumento se utilizan rayos electromagnéticos y el instrumento quirúrgico se coloca fuera del envase estéril alrededor del manipulador.
El documento WO 2014/1622217 describe un dispositivo para el posicionamiento de instrumentos en una envoltura estéril. En este caso, están previstos orificios de paso para conectores eléctricos. No se dan indicaciones para la fijación adicional frente al paciente. Esto se aplica también para el documento US 2005/101868, que muestra un dispositivo para la conducción de instrumento, estando previsto un mango. El documento DE 4403567 A1 describe, además, un dispositivo con una envoltura estéril para la realización de operaciones endoscópicas.
Por consiguiente, la invención tiene el cometido de crear un dispositivo sencillo, especialmente para intervenciones asistidas por robot, que posibilita la máxima esterilidad en un entorno local, y no está limitado a la aplicación de un ipo de robot determinado.
La idea básica de la invención consiste en proteger localmente el instrumento operativo de manera estéril a través de la envoltura frente al medio ambiente (incluyendo los robots) y configurar el dispositivo de tal manera que durante la intervención operativa se mantiene la atmósfera estéril en un volumen limitado alrededor del lugar de la intervención. Por lo tanto, se describe una disposición que posibilita localmente en el lugar de la intervención una atmósfera estéril, que no está influenciada por las condiciones de pureza fuera de la disposición.
El dispositivo propuesto sirve para el posicionamiento, especialmente para la introducción y manipulación de agujas y (micro) instrumentos así como para el posicionamiento de (micro) aparatos terapéuticos y diagnósticos, como por ejemplo agujas de punción, de inyección, de ablación o endoscopios o similares en un paciente. En este caso, la envoltura del "tipo de globo" es estéril al menos sobre su lado interior y rodea un instrumento estéril al menos parcialmente, con preferencia completamente o en su mayor parte. Además, en la envoltura está previsto al menos un orificio de paso hermético al gas, que puede servir, por ejemplo, para el acoplamiento de un soporte de fijación de instrumentos. En este caso, tal soporte de fijación de instrumentos, lo mismo que el propio instrumento, está alojado estéril en la envoltura y es móvil de manera controlada al menos en dos direcciones espaciales a través del movimiento del soporte de fijación de instrumentos fuera de la envoltura. El soporte de fijación del instrumento posee con preferencia fuera de la envoltura unas piezas de acoplamiento (cierres rápidos) a un manipulador externo, que se puede realizar de acuerdo con el estado de la técnica mencionado anteriormente, en particular de acuerdo con el documento EP 1722698 B1.
Los componentes del dispositivo se pueden esterilizar en común o por separado a través de procedimientos de esterilización conocidos y se pueden alojar de manera estéril segura en un envase y caja de transporte estériles. El ensamblaje de componentes individuales se puede realizar en entorno estéril antes del proceso de esterilización o directamente antes de la intervención en entorno estéril.
Con preferencia, el instrumento estéril presenta al menos una punta en forma de aguja, con la que se puede perforar una membrana dispuesta hacia el paciente. Para impedir una perforación imprevista de la envoltura estéril, la punta del instrumento puede estar provista con una caperuza de protección, que se puede retirar antes de la intervención a través de la envoltura. La colocación de la envoltura en el paciente, más exactamente en el lugar de intervención se realiza con preferencia con una superficie adhesiva. El lugar de intervención se limpia localmente antes de la intervención, para la elevación adicional de la esterilidad o para ahorrar el proceso de limpieza en el lugar...
Reivindicaciones:
1.- Dispositivo para el posicionamiento de instrumentos estériles, en particular de agujas de punción, agujas de inyección o sondas de operación, en un paciente, con una envoltura (3) estéril al menos sobre su lado interior y el instrumento estéril (2) , en el que la envoltura (3) envuelve, al menos parcialmente, el instrumento estéril (2) , y con al menos un orificio de paso (4) hermético al gas colocado en la envoltura (3) , en el que el instrumento estéril (2) presenta al menos un soporte de fijación de instrumentos estéril (2') , que está guiado a través del orificio de paso (4) hacia piezas de acoplamiento (5) y a través del movimiento del soporte de fijación de los instrumentos (20) se puede mover fuera de la envoltura (3) de manera controlada en al menos dos direcciones espaciales, caracterizado porque la envoltura (3) presenta hacia el paciente (P) una superficie adhesiva (7') en forma de anillo, con la que se puede fijar la envoltura (3) junto con el instrumento (2) de forma hermética al gas en el lugar de intervención.
2. Dispositivo de acuerdo con la reivindicación 1, caracterizado porque el instrumento estéril (2) presenta al menos una punta (2a) en forma de aguja, con la que se puede perforar una membrana (6) que pertenece a la envoltura (3) y dispuesta hacia el paciente, en particular después de la retirada de una protección de la punta.
3. Dispositivo de acuerdo con la reivindicación 1 ó 2, caracterizado porque el soporte de fijación de instrumentos (2') presenta fuera de la envoltura (3) unas piezas de acoplamiento (5) para un manipulador externo (1') .
4. Dispositivo de acuerdo con una de las reivindicaciones 1 a 3, caracterizado porque el instrumento estéril (2) presenta fuera de la envoltura (3) un mango (2b) y7º se puede conectar directamente en un manipulador externo (1') .
5. Dispositivo de acuerdo con una de las reivindicaciones 1 a 4, caracterizado porque el instrumento estéril (2) es una aguja hueca, que presenta fuera de la envoltura (3) una conexión (11) para la alimentación de sustancias activas a la aguja hueca.
6. Dispositivo de acuerdo con la reivindicación 2 y una de las reivindicaciones 3 a 5, caracterizado porque la membrana (6) rodea el instrumento (2) en un lugar de punción de manera hermética al gas.
7. Dispositivo de acuerdo con la reivindicación 2 y una de las reivindicaciones 3 a 6, caracterizado porque la membrana (6) está cubierta por al menos una lámina de protección (8) desprendible, colocada en el lado exterior de la membrana (6) , en el que la membrana (6) y/o la lámina de protección (8) están estabilizadas por un anillo de retención (7) .
8. Dispositivo de acuerdo con una de las reivindicaciones 1 a 7, caracterizado porque le envoltura (3) contiene una válvula de entrada o una membrana semipermeable (12) para la alimentación de un gas de esterilización y/o de un gas inerte en la envoltura (3) , con preferencia para la generación de una sobrepresión dentro dela envoltura (3) así como con preferencia un dispositivo de ventilación.
9. Dispositivo de acuerdo con una de las reivindicaciones 1 a 8, caracterizado porque le envoltura (3) con la superficie adhesiva (7') y al menos una lámina de protección (8) están envasadas estériles junto con el instrumento (2) en un envase de transporte (10) .
10. Dispositivo de acuerdo con una de las reivindicaciones 1 a 9, caracterizado porque al menos en uno de los componentes del dispositivo (1) está colocada una marca.
Patentes similares o relacionadas:
Calibrador especial de imagen 3D, sistema y método de localización quirúrgica, del 22 de Julio de 2020, de Tinavi Medical Technologies Co., Ltd: Un sistema de posicionamiento quirúrgico, en el que el sistema de posicionamiento quirúrgico comprende un robot quirúrgico , una computadora […]
Posicionador de herramienta articulado y sistema que emplea mismo, del 24 de Junio de 2020, de Titan Medical Inc: Un aparato de herramienta quirúrgica que comprende: un aparato efector final que comprende: un efector final que tiene […]
Sistema robótico quirúrgico con carro y unidad manipuladora, del 17 de Junio de 2020, de Microsure B.V: Sistema robótico quirúrgico, que comprende: - una estructura de suspensión que comprende un carril ; - una unidad manipuladora que comprende: […]
Robot, particularmente para cirugía mínimamente invasiva a través de una única incisión parietal o un orificio natural, del 29 de Abril de 2020, de Valuebiotech S.r.l: Robot , particularmente para cirugía mínimamente invasiva a través de una única incisión parietal y/u orificio natural, que comprende: - por lo menos […]
Sistema robótico quirúrgico de control híbrido, del 29 de Abril de 2020, de CHILDREN'S NATIONAL MEDICAL CENTER: Un sistema robótico quirúrgico, que comprende: al menos un brazo robótico ; al menos un sensor ; un conjunto de control ; […]
Conjunto de cánulas para procedimientos quirúrgicos laparoscópicos con presión regulada y con asistencia robótica, del 15 de Abril de 2020, de CONMED CORPORATION: Un conjunto de cánulas para su uso en la cirugía laparoscópica asistida por robot, que comprende: a) un conjunto adaptador configurado para su recepción dentro […]
Dispositivo y sistema que incluyen brazos mecánicos, del 15 de Abril de 2020, de Memic Innovative Surgery Ltd: Un dispositivo quirúrgico médico dimensionado y conformado para su inserción en un cuerpo que comprende: al menos una extremidad mecánica alargada que incluye […]
Sistema quirúrgico electromecánico, del 25 de Diciembre de 2019, de SRI INTERNATIONAL: Un sistema quirúrgico , que comprende: uno o más brazos electromecánicos que se pueden acoplar a un dispositivo de fijación; una o más herramientas electromecánicas […]