CIP-2021 : A61B 34/00 : Cirugía asistida por ordenador; Operadores o robots adaptados de forma especial para su uso en cirugía.
CIP-2021 › A › A61 › A61B › A61B 34/00[m] › Cirugía asistida por ordenador; Operadores o robots adaptados de forma especial para su uso en cirugía.
Notas[t] desde A61 hasta A63: SALUD; SALVAMENTO; DIVERSIONES
A61B 34/10 · Simulación, modelización o planificación asistida por ordenador de operaciones quirúrgicas.
A61B 34/20 · Sistemas de navegación quirúrgica; Dispositivos para el seguimiento o guía de instrumentos quirúrgicos, p. ej. para neuronavegadores o técnicas estereotáxicas sin marco o guías estereotáxicas ("frameless stereotaxis").
A61B 34/30 · Robots quirúrgicos.
A61B 34/32 · · que operan de forma autónoma.
A61B 34/35 · · para telecirugía.
A61B 34/37 · · Robots tipo maestro-esclavo (A61B 34/35 tiene prioridad).
CIP2021: Invenciones publicadas en esta sección.
Interfaz de manipulador robótico para herramientas quirúrgicas articuladas.
(08/07/2020) Interfaz de manipulador robótico para acoplar una herramienta quirúrgica articulada a un manipulador de un robot quirúrgico, comprendiendo la interfaz:
- un primer elemento de interfaz unido al manipulador ;
- un segundo elemento de interfaz que está separado del primer elemento de interfaz y acoplable al mismo y, por lo tanto, puede unirse al robot quirúrgico, estando dispuesto el segundo elemento de interfaz para montar la herramienta quirúrgica articulada,
en el que respectivas superficies de contacto de ambos elementos de interfaz están dispuestas para alojar un paño estéril intermedio aplicado para rodear la primera interfaz en el lado no estéril del paño estéril;
en el que el primer elemento de interfaz comprende un mecanismo…
Sistema robótico quirúrgico de control híbrido.
(29/04/2020) Un sistema robótico quirúrgico, que comprende:
al menos un brazo robótico ;
al menos un sensor ;
un conjunto de control ; un mando ; donde: el al menos un sensor está configurado para detectar una entrada o una condición operativa del al menos un brazo robótico; y
el mando está configurado para poder unirse y separarse del al menos un brazo robótico; y el conjunto de control está configurado para procesar la entrada o la condición, y para operar al menos un brazo robótico en una pluralidad de modos de operación,
donde el conjunto de control ejecuta comandos para el al menos un brazo robótico, a fin de compartir un espacio de trabajo y los elementos quirúrgicos ;
donde los elementos quirúrgicos incluyen al menos una herramienta quirúrgica…
Sistema quirúrgico electromecánico portátil.
(15/04/2020) Un conjunto del mango de un dispositivo quirúrgico electromecánico portátil, el conjunto del mango que comprende:
una unidad de alimentación que incluye:
5 un conjunto central que tiene una pluralidad de motores y una pluralidad de ejes de transmisión (152a, 154a, 156a) acoplados operativamente a un motor respectivo de la pluralidad de motores, un procesador conectado y configurado para controlar cada motor; y una batería conectada eléctricamente al procesador y a cada motor; y
un alojamiento interno que encierra al menos la pluralidad de motores, el procesador y la batería; un alojamiento de la cubierta exterior que incluye las secciones, media distal (10a) y proximal (10b) las cuales cuando se unen definen una cavidad (10c) configurada para recibir en su interior selectivamente la unidad de alimentación, la…
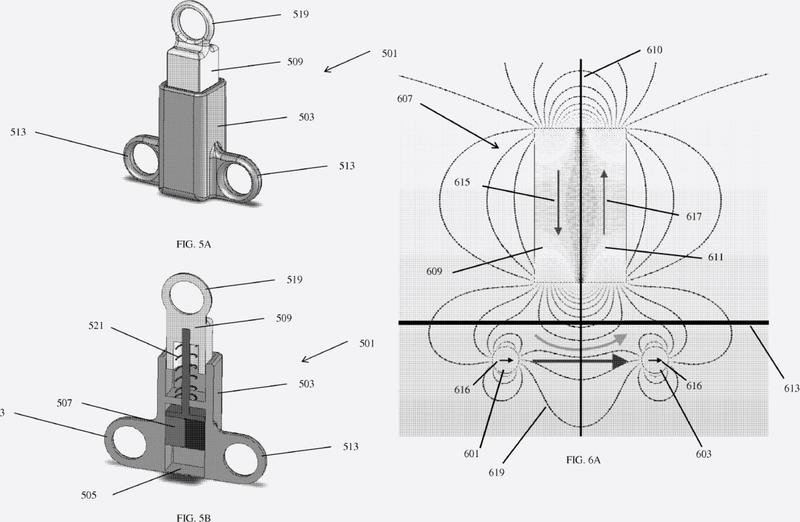
Inyección magnética de agentes terapéuticos mediante la adición de extrusiones de material con magnetización y permeabilidad magnética diferentes.
(19/02/2020) Un dispositivo para dirigir un agente que es magnético o magnetizable, que comprende: una configuración magnética que tiene una pluralidad de imanes, en donde un primer imán que tiene un primer polo norte-sur magnético en la pluralidad de imanes produce un primer campo magnético; un segundo imán que tiene un segundo polo norte-sur magnético en la pluralidad de imanes produce un segundo campo magnético; el primer imán tiene una primera magnetización que es opuesta a una segunda magnetización del segundo imán; el primer campo magnético y el segundo campo magnético crean un campo combinado y una fuerza de empuje desde el primer imán y el segundo imán, en donde el primer polo norte-sur…
Interfaz gráfica de usuario para sistema de biopsia de tejido.
(08/01/2020). Solicitante/s: SENORX, INC.. Inventor/es: LUBOCK, PAUL, LOUW,FRANK,R, QUICK,RICHARD,L, SHABAZ,Martin V, DAW,DEREK.
Módulo de control para controlar un sistema de biopsia que tiene un elemento de corte de tejido adaptado para cortar una o más muestras de tejido a partir de tejido en un sitio diana dentro del paciente, en asociación con una interfaz gráfica de usuario, GUI,
caracterizado porque:
la GUI se controla de tal manera que
representa diversas partes del sitio diana dentro del paciente del que se han tomado o pueden tomarse una o más muestras de tejido, y
representa una posición angular del elemento de corte de tejido basándose en una forma circular o una forma poligonal.
PDF original: ES-2770174_T3.pdf
Sistema para realizar cirugía ocular con pantalla simultánea de información gráfica para flap y ablación.
(25/12/2019). Solicitante/s: ALCON, INC. Inventor/es: SCHMID,STEFAN, ABRAHAM,MARIO, WITTNEBEL,MICHAEL, LANGE,MAIK, STARIGK,MARTIN.
Un sistema de cirugía para realizar cirugía ocular que comprende:
un dispositivo de corte para cortar un flap en una córnea de un ojo que se somete a cirugía ocular;
un dispositivo de conformación para realizar la ablación de una parte interior de la córnea; y
al menos una pantalla para mostrar una imagen única que presente simultáneamente una representación gráfica de una ubicación del flap planificada o real superpuesta con una representación gráfica de un área de ablación planificada o real, en donde la imagen única comprende además una alerta cuando se identifica una inconsistencia entre la ubicación del flap planificada y el área de la ablación planificada.
PDF original: ES-2773530_T3.pdf
Funda protectora multifuncional para una herida de tejido blando durante una operación.
(23/10/2019) Una funda protectora multifuncional para heridas de tejidos blandos, que comprende:
una bolsa de recogida de desechos que incluye un parche inferior y un parche superficial , en donde los bordes exteriores del parche inferior y del parche superficial están conectados para formar una cavidad, se proporciona un orificio quirúrgico pasante en el parche inferior y se proporciona una abertura de entrada de desechos en el parche superficial ; se introducirá un anillo inferior en un cuerpo humano, en donde el anillo inferior está configurado para apartar los tejidos humanos que rodean el anillo inferior a fin de formar un espacio quirúrgico;
un anillo abatible ubicado sobre la bolsa de recogida…
Sistemas de instrumentos robóticos que utilizan sensores de fibra óptica.
(09/10/2019) Un sistema que comprende:
un cuerpo de instrumento alargado ;
un sensor de fibra óptica acoplado al cuerpo de instrumento alargado y que forma un sensor de deformación, comprendiendo el sensor de fibra óptica un núcleo que incluye rejillas de Bragg de fibra;
y un sistema para calibrar dicho sensor de fibra óptica asociado con dicho cuerpo de instrumento alargado de un instrumento alargado, que comprende:
un útil de calibración configurado para posicionar el cuerpo de instrumento alargado en una configuración geométrica conocida; en el que dicho útil de calibración tiene una ranura en la que el cuerpo de instrumento alargado y el sensor de fibra óptica pueden colocarse…
Método de fabricación de un instrumento médico.
(02/10/2019) Método de fabricación de un dispositivo con articulaciones de un instrumento médico que comprende las siguientes etapas:
(A) proporcionar un accesorio de mecanizado en una máquina de descarga eléctrica de hilo que tiene un hilo de descarga eléctrica, comprendiendo dicho accesorio de mecanizado una pluralidad de orificios de miembros cada uno adaptado para alojar al menos una pieza de trabajo, estando dicha pieza de trabajo adaptada para formar al menos una porción de dicho dispositivo con articulaciones de dicho instrumento médico;
(B) proporcionar al menos dos piezas de trabajo, que comprenden una primera pieza de trabajo y una segunda pieza de trabajo, alojadas dentro de al menos dos orificios de miembros de dicha pluralidad de orificios de miembros;
(C)…
Instrumento, en particular un instrumento médico-endoscópico o tecnoscopio.
(28/08/2019) Instrumento de vástago, en particular instrumento médico-endoscópico o tecnoscopio, con un vástago y con un cabezal del instrumento, el cual presenta al menos una parte articulada de forma acodable en el extremo distal del vástago y un portaherramientas articulado de forma acodable en la parte articulada en el plano de acodamiento de la parte articulada , en donde junto al extremo proximal de la parte articulada está configurado un dentado que engrana con un cuerpo dentado apoyado de forma giratoria en el vástago y acoplado para movimiento con un par de cables Bowden para el control del movimiento del cabezal del instrumento, caracterizado por que el cuerpo dentado está dividido en dos partes transversalmente a su eje de giro, en donde las dos partes del cuerpo dentado pueden ser giradas una con relación a otra,…
Un sistema y método para programación asistida por ordenador de trayectorias para una inserción quirúrgica en un cráneo.
(21/08/2019) Un método de uso de un sistema informático para ayudar en la programación de una trayectoria para una inserción quirúrgica en un cráneo, comprendiendo el método:
proporcionar al sistema informático una representación tridimensional del cráneo y de objetos cruciales ubicados dentro del cráneo, en el que dichos objetos cruciales comprenden características anatómicas a evitar durante la inserción quirúrgica;
proporcionar al sistema informático una ubicación diana para la inserción dentro del cráneo;
generar mediante el sistema informático un primer conjunto que comprende una pluralidad de puntos de…
Dispositivos para la formación de fístulas.
(31/07/2019). Ver ilustración. Solicitante/s: TVA Medical, Inc. Inventor/es: PATE,THOMAS DIFFLEY.
Un sistema para crear una fístula entre dos vasos, que comprende:
un primer catéter que comprende un primer elemento magnético ; y
un segundo catéter que comprende un segundo elemento magnético ;
en el que al menos uno de los primer y segundo catéteres comprende un elemento formador de fístulas , caracterizado por que el primer elemento magnético está configurado para producir un primer campo magnético que sea más intenso en un primer lado del primer elemento magnético que en un segundo lado del primer elemento magnético ;
y por que el primer elemento magnético comprende una pluralidad de regiones , teniendo cada una una polaridad, y en el que la pluralidad de regiones del primer elemento magnético está configurada de modo que la polaridad de cada región se gire un primer ángulo en relación con la polaridad de una región inmediatamente precedente en un sentido de proximal a distal.
PDF original: ES-2743505_T3.pdf
Dispositivo de biopsia que tiene un motor lineal.
(27/06/2019) Dispositivo de biopsia para accionar un elemento de penetración, que comprende:
un alojamiento de dispositivo, teniendo el alojamiento de dispositivo una parte de asidero configurada para que la agarre la mano de un médico;
un motor lineal que tiene un alojamiento de motor y un árbol de motor lineal, acoplándose el alojamiento de motor al alojamiento de dispositivo, pudiéndose mover el árbol de motor lineal en el alojamiento de motor a lo largo de un eje longitudinal, teniendo el árbol de motor lineal una parte de extremo proximal y una parte de extremo distal que tiene un extremo distal, estando la parte de extremo distal configurada para acoplarse de manera accionable al elemento de penetración;
un circuito de controlador acoplado operativamente al motor lineal, teniendo el circuito…
Conjuntos de mango para dispositivos de tratamiento intravascular y sistemas y procedimientos asociados.
(05/06/2019) Un conjunto de mango para dispositivos de tratamiento intravascular para conseguir una neuromodulación renal intravascular, inducida térmicamente, que comprende:
una carcasa ;
un rotador acoplado a una región proximal de un eje alargado configurado para ser posicionado en una arteria renal y que se extiende a lo largo de un eje y que tiene una región distal flexable; y
un actuador conectado operativamente a la región distal flexable del eje alargado,
en el que el actuador está configurado para flexar la región distal flexable del eje alargado,
en el que el rotador está configurado para girar el eje alargado alrededor del eje sin girar la carcasa , y en el que el conjunto de mango comprende un elemento limitador de rotación configurado para prevenir la rotación del eje alargado más allá de un número…
Unidad de control para un dispositivo médico.
(04/06/2019) Una unidad de control para un dispositivo médico, comprendiendo la unidad de control una interfaz de usuario que tiene:
(a) una interfaz de palma que está montada en una junta unida a una carcasa de la unidad de control, siendo dicha interfaz de palma contactable y operable por la palma de una mano;
(b) una interfaz de dedos que está unida de manera pivotante a dicha interfaz de palma y que puede contactarse con uno o más dedos de dicha mano;
estando la unidad de control caracterizada por:
(c) una interfaz de dorso que puede contactarse con el revés de dicha mano y que sirve para controlar el ángulo y la altura del dispositivo médico con respecto a un sitio de acceso al tejido, incluyendo dicha interfaz de dorso una restricción unida de manera pivotante a dicha interfaz de palma, siendo dicha restricción…
Dispositivo de asistencia al posicionamiento de un instrumento médico con respecto a un órgano interno de un paciente.
(29/05/2019) Dispositivo de asistencia al posicionamiento de un instrumento médico insertado en una vía natural o en una vía artificial de un paciente con respecto a un órgano interno (P) de un paciente, incluyendo el dispositivo:
- un soporte destinado a ser insertado al menos en parte en el cuerpo del paciente y que lleva el instrumento médico;
- medios de desplazamiento del soporte, incluyendo dichos medios de desplazamiento un brazo articulado que comprende una pluralidad de grados de libertad para desplazar un extremo proximal (1a) del soporte;
- medios de adquisición de imágenes del órgano interno para posicionar el instrumento médico con respecto al órgano interno,…
Aplicador médico servo asistido.
(19/03/2019). Solicitante/s: WAVELIGHT GMBH. Inventor/es: ROBL,GERHARD, KITTELMANN,DR. OLAF, VOGLER,DR. KLAUS.
Procedimiento para el posicionamiento de un dispositivo médico , con las siguientes etapas: detección de una fuerza, que actúa sobre una instalación de guía (4; 4') acoplada mecánicamente con el dispositivo médico, con una instalación de detección de la fuerza (6; 6'), que está dispuesta entre la instalación de guía (4; 4') y el dispositivo médico , y modificación, a través de una instalación de accionamiento , de una variable cinemática del dispositivo médico en función de la fuerza detectada, caracterizado por la etapa del retardo del dispositivo médico , en el caso de que no se detecte ninguna fuerza, y la etapa de la regulación de la posición del dispositivo médico, de manera que el dispositivo médico mantiene su posición, en el caso de que no se detecte ninguna fuerza actuando sobre la instalación de detección de la fuerza (6; 6') y no se detecte ningún movimiento del dispositivo médico.
PDF original: ES-2704600_T3.pdf
Dispositivo médico orientable.
(16/11/2018). Solicitante/s: Human Extensions Ltd. Inventor/es: SHOLEV,MORDEHAI.
Dispositivo médico que comprende:
un cuerpo de dispositivo alargado que incluye una parte orientable que puede orientarse dentro de un cuerpo de un sujeto a través de por lo menos un cable de control; y
una pluralidad de guías de cables de control dispuestas a lo largo de dicho cuerpo de dispositivo alargado, caracterizado por el hecho de que
dichas guías de cables son desplegables para moverse radialmente hacia afuera y desviar dicho por lo menos un cable de control alejándose de dicho cuerpo de dispositivo alargado, en el que la desviación de dicho por lo menos un cable de control alejándose de dicho cuerpo alargado disminuye una fuerza de tracción requerida para orientar dicha parte orientable y desplaza un eje longitudinal de dicho por lo menos un cable de control desde un eje de desviación de dicha parte orientable.
PDF original: ES-2689868_T3.pdf
ROBOT QUIRÚRGICO PARA INTERVENCIONES ORTOPÉDICAS.
(15/11/2018). Solicitante/s: CYBER SURGERY, S.L. Inventor/es: PRESA ALONSO,JORGE, URZAINQUI GLARIA,ALFONSO, OÑATIVIA BRAVO,Jon, ESCUDERO MARTÍNEZ DE IBARRETA,Álvaro, SÁNCHEZ TAPIA,Emilio.
Robot quirúrgico para rastrear y compensar el movimiento óseo, comprendiendo el robot: un brazo de robot y una guía de herramienta en el extremo actuador del brazo, un rastreador fijado al brazo de robot en el mismo plano que la guía de herramienta, comprendiendo el rastreador un conjunto de segmentos articulados (1a-1d) y codificadores asociados a los segmentos de tal manera que el movimiento del rastreador se permite y se controla en al menos seis grados de libertad. La base del rastreador y la guía de herramienta comparten el mismo armazón, es decir, están en el mismo plano, de modo que el sistema es capaz de determinar directamente la colocación exacta de la guía de herramienta con respecto al hueso rastreado sin ningún dispositivo intermedio. De esta manera, se puede prescindir de un rastreador óptico y de las cámaras asociadas.
Sistema robótico médico con brazo manipulador del tipo de coordenadas cilíndricas.
(08/11/2018) Sistema robótico médico para llevar a cabo procedimientos médicos, que comprende un manipulador de robot para la manipulación asistida por robot de un instrumento médico , en el que dicho manipulador de robot comprende:
una base ;
un brazo de manipulador, que tiene una parte esencialmente vertical soportada por dicha base y una parte esencialmente horizontal soportada por dicha parte vertical;
una muñeca de manipulador, soportada por dicho brazo del manipulador; y
una unidad efectora , soportada por dicha muñeca del manipulador y configurada para sujetar un instrumento médico;
dicho brazo del manipulador tiene una configuración cinemática PRP cilíndrica, que tiene, en secuencia…
Medición de la longitud de un tornillo de bloqueo.
(01/10/2018). Solicitante/s: Stryker European Holdings I, LLC. Inventor/es: SIMON, BERND, BLAU, ARNO, REIMERS,NILS.
Un procedimiento para identificar la longitud del tornillo óseo a insertar a través de un orificio perforado en una dirección de perforación predeterminada en una posición predeterminada a través de un hueso , el procedimiento se caracteriza por comprender los siguientes pasos:
- identificar la dirección de perforación predeterminada de dicho tornillo óseo y la posición predeterminada en una primera imagen de rayos X del hueso, en la que la identificación de la posición predeterminada en el hueso incluye una medición de las distancias entre el orificio y la superficie externa de la imagen del hueso (i) en una dirección axial del hueso y (ii) en una dirección perpendicular a la dirección axial del hueso;
- transferir la dirección y la posición identificadas a un modelo óseo correspondiente; y
- determinar la longitud del tornillo óseo en base a la dirección y posición transferida en el modelo óseo.
PDF original: ES-2684140_T3.pdf
Dispositivo de fijación de uso médico, así como dispositivo referenciador e instrumental médico.
(13/09/2018) Dispositivo de fijación de uso médico para fijar de manera no invasiva un dispositivo de marcación de uso médico , que presenta dos o más elementos marcadores , a una parte del cuerpo de un paciente , en particular en un muslo, donde el dispositivo de fijación comprende un cuerpo portante que se extiende en forma plana en dos direcciones de extensión orientadas angularmente entre sí , en su forma adaptable al contorno de la parte del cuerpo , en el que se fijó o puede fijarse el dispositivo de marcación , en donde el cuerpo portante puede dilatarse elásticamente en la superficie de su extensión y comprende una primera área de dilatación y al menos una segunda área de dilatación , cuya dilatabilidad en al menos una…
Sistemas y métodos para activar selectivamente zonas de guía háptica.
(23/05/2018). Solicitante/s: MAKO SURGICAL CORP. Inventor/es: GRANCHI,CARINNE CECILE, IORGULESCU,RADU, MOSES,DENNIS, WOJCIK,JASON ROBERT.
Un método para activar una geometría háptica virtual basada en una posición de una parte de un instrumento relativa a una característica objetivo, que comprende:
detectar la posición de un punto de referencia (103a) de un instrumento con respecto a una pluralidad de características objetivo (402a, 402b, 402c), en el que cada una de la pluralidad de características objetivo corresponde a una geometría háptica virtual respectiva (400a, 400b, 400c) entre una pluralidad de geometrías hápticas inactivas (400a, 400b, 400c);
determinar cuál de la pluralidad de características objetivo está más cerca y dentro de una distancia umbral del punto de referencia del instrumento, para seleccionar una geometría háptica virtual correspondiente a la característica objetivo más cercana; y
activar la geometría háptica virtual correspondiente a la característica objetivo más cercana.
PDF original: ES-2674732_T3.pdf
Alineación de piernas para la medición de parámetros quirúrgicos en cirugía de reemplazo de cadera.
(25/04/2018) Un sistema CAS para medir parámetros quirúrgicos durante la cirugía de reemplazo de cadera para guiar a un operador en la inserción de un implante de articulación de cadera en un fémur, que comprende:
al menos una primera referencia rastreable en relación fija con la pelvis, siendo rastreable la primera referencia rastreable para formar un marco de referencia pélvico;
una herramienta de registro que puede rastrearse;
un aparato sensor para hacer seguimiento al menos a la primera referencia rastreable y la herramienta de registro; y una unidad controladora conectada al aparato sensor para recibir datos de seguimiento para al menos la primera referencia rastreable y…
Transmisión con primer y segundo elemento de transmisión.
(21/02/2018) Sistema de transmisión para un brazo robótico , que comprende: un primer componente que presenta un miembro de accionamiento y un miembro accionado ; 5 un segundo componente fijado a una placa de base ; y primer y segundo elemento de transmisión acoplados al miembro de accionamiento y el segundo componente y configurados para provocar el movimiento del primer componente en relación con el segundo componente en respuesta a una fuerza del primer y segundo elemento de transmisión mediante el miembro de accionamiento ,
donde el primer componente comprende una parte (148a) configurada para inhibir el movimiento del miembro de accionamiento cuando la parte…
Transmisión con mecanismo de conexión para variar fuerza de tensión.
(21/02/2018) Sistema de transmisión , que comprende:
un miembro de accionamiento ;
un miembro accionado que presenta un mecanismo de conexión ; y
al menos una transmisión parcialmente flexible acoplada al miembro de accionamiento y el mecanismo de conexión del miembro accionado y configurada para provocar el movimiento del miembro accionado en respuesta al movimiento del miembro de accionamiento, donde la transmisión flexible comprende una pluralidad de elementos de tensión ,
donde el mecanismo de conexión está configurado para ajustarse con el fin de variar una fuerza de tensión aplicada a la transmisión flexible , y caracterizado por que el mecanismo de conexión incluye una pluralidad de miembros de acoplamiento , estando…
Dispositivo de diagnóstico del tracto gastrointestinal con un endoscopio desechable y un procedimiento de control para el mismo.
(31/01/2018) Procedimiento de control de un dispositivo de diagnóstico del tracto gastrointestinal con un endoscopio desechable , que comprende, por lo menos, las etapas siguientes:
(a) disponer un endoscopio y conectar eléctricamente el endoscopio a un puesto de trabajo ; (b) determinar la situación de utilización del endoscopio ; y
(c) determinar que el endoscopio no ha sido utilizado, está siendo utilizado o ha finalizado su utilización 10 según la situación de utilización del endoscopio , en el que
si se determina que la situación de utilización del endoscopio es que ha finalizado su utilización, impedir la utilización del endoscopio ;
caracterizado por que,
si se determina que la situación de utilización del endoscopio es que está siendo utilizado, continuar…
SISTEMA ROBÓTICO QUIRÚRGICO Y MÉTODO PARA MANEJAR UN SISTEMA ROBÓTICO QUIRÚRGICO.
(28/12/2017) Un sistema robótico quirúrgico que comprende: unidades robóticas, cada una de las cuales es independiente de las demás y comprende un soporte y un conjunto de brazo robótico ; dicho soporte comprende medios de movimiento y está configurado para cambiar la posición y la orientación del soporte con respecto a la mesa ; dicho conjunto de brazo robótico comprende: un brazo robótico , una herramienta quirúrgica acoplada a este y un sensor de fuerza configurado para recibir la medición de las fuerzas y de los pares aplicados por la herramienta . El sistema comprende también una consola de control configurada para manejar a distancia dichas unidades robóticas, que comprende: un medio de computación ; dispositivos…
Sistema de diagnóstico del tracto gastrointestinal y procedimiento de control del mismo.
(27/12/2017) Sistema de diagnóstico del tracto gastrointestinal, que comprende por lo menos:
un endoscopio que tiene una placa magnética en el mismo, teniendo la placa magnética un primer polo magnético y un segundo polo magnético distribuidos respectivamente en la mitad inferior y en la mitad superior de la placa magnética , situados a lo largo de la dirección del grosor (TD) de la placa magnética ; y
un dispositivo de control magnético que incluye:
una varilla magnética que incluye un primer polo magnético eléctrico en una parte terminal de la varilla magnética y un segundo polo magnético eléctrico situado en la parte de la base de la varilla magnética ;
un módulo de emisión de una fuerza magnética para…
Sistema para identificar un punto de referencia.
(08/11/2017). Solicitante/s: SMITH & NEPHEW, INC.. Inventor/es: GRUSIN,Nathaniel K, AUSTIN,GENE EDWARD, RAINS,JAMES K, RITCHEY,NICHOLAS S, FABER,HENRY B, SCHWÄGLI,TOBIAS, RICCI,WILLIAM M, JANNA,SIED W, HEOTIS,CHARLES C.
Un sistema para identificar un punto de referencia, el sistema comprende:
un generador de campo para generar un campo magnético;
un implante ortopédico ubicado dentro del campo magnético, el implante ortopédico tiene al menos un punto de referencia ;
una sonda retirable que comprende un primer sensor magnético espaciado una distancia establecida del al menos un punto de referencia;
un identificador de punto de referencia que tiene un segundo sensor magnético ; y
un procesador para comparar datos de sensor del primer y el segundo sensor y usar la distancia establecida para calcular la posición del identificador de punto de referencia respecto al por lo menos un punto de referencia, caracterizado por que el implante ortopédico incluye un surco longitudinal en el que es insertable la sonda retirable, y en que el primer sensor magnético está espaciado la distancia establecida del al menos un punto de referencia cuando la sonda retirable se inserta en el surco.
PDF original: ES-2658591_T3.pdf
Pinzas para cirugía laparoscópica mínimamente invasiva.
(02/11/2017) Pinzas para cirugía laparoscópica mínimamente invasiva, que comprenden:
- unas garras montadas en un cuerpo giratorio
- un cuerpo principal ,
- primeros medios de transmisión del movimiento de las garras y
- segundos medios de transmisión del movimiento del cuerpo giratorio ,
comprendiendo, respectivamente, dichos primeros y segundos medios de transmisión por lo menos un tendón formados cada uno por varios cables que están dispuestos de manera que la sección transversal de por lo menos un tendón asociado a los primeros medios de transmisión del movimiento presenta una geometría variable (A, B, C) a lo largo de su recorrido por el interior de dicho cuerpo principal ;
caracterizadas por el hecho de que las pinzas comprenden unos módulos de…
Sistema de cirugía estereotáctica asistida por ordenador basada en una visualización tridimensional.
(03/08/2016) Sistema quirúrgico asistido por ordenador, que comprende:
un aparato para obtener imágenes de una zona de interés de una parte de la anatomía de un sujeto, comprendiendo el aparato un fluoroscopio ;
una memoria que contiene instrucciones ejecutables; y
un procesador programado mediante las instrucciones para:
recibir una fluorografía de la zona de interés y un implante posicionado en la zona de interés tomada en un primer ángulo con respecto al aparato, estando asociado el implante con un cuerpo de referencia ;
detectar la presencia del cuerpo de referencia en la fluorografía;
determinar una posición y dimensión espacial del implante en función de una identificación y registro del cuerpo de referencia;
superponer un implante virtual…
{kind=link}