CIP-2021 : B25J 19/06 : Dispositivos de seguridad.
CIP-2021 › B › B25 › B25J › B25J 19/00 › B25J 19/06[1] › Dispositivos de seguridad.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
B25J 19/06 · Dispositivos de seguridad.
CIP2021: Invenciones publicadas en esta sección.
Aparatos y procedimientos para el accionamiento remoto de puntos de control.
(24/06/2020) Aparato para el accionamiento remoto de un punto de control , que comprende:
un elemento alargado que tiene un primer extremo y un segundo extremo,
un elemento de apoyo que tiene una parte móvil , la parte móvil está acoplada de manera ajustable con el elemento alargado a lo largo de cualquier parte de la longitud del elemento alargado de manera que el primer extremo y el segundo extremo del elemento alargado están libres del contacto con el aparato para el accionamiento remoto de un punto de control durante una función de accionamiento;
un mecanismo de impulso en comunicación con la parte móvil , el mecanismo de impulso está configurado para proporcionar par a la parte móvil y al elemento alargado en respuesta a una fuerza motriz, en el que el mecanismo de impulso está desplazado de la parte móvil …
Procedimiento de tratamiento de una superficie, y autómata correspondiente.
(20/05/2020) Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de:
- una base configurada para desplazarse por un suelo,
- una plataforma montada sobre la base y configurada para desplazarse, al menos en parte, perpendicularmente a la base , por ejemplo, verticalmente, y
- un medio de tratamiento , por ejemplo, un brazo, montado sobre la plataforma y que consta de un extremo móvil configurado para tratar una superficie dada,
procedimiento en donde: caracterizado por que
a) se divide la superficie a tratar en subdivisiones de superficie inferior o igual a la superficie dada, siendo las subdivisiones obtenidas por distribución de la superficie a tratar de acuerdo con una cuadrícula regular cuyas líneas corresponden a los desplazamientos de la plataforma y de la base ,
a') se…
Sistema de interacción de robot.
(08/04/2020) Procedimiento para el funcionamiento de un sistema de interacción de robot, que está dispuesto en una instalación metalúrgica o de laminación y allí asociado a una estación de trabajo o zona de trabajo, para la ejecución de tareas con división de trabajo entre un robot y un trabajador humano en interacción temporal y espacial en la zona de trabajo y de movimiento del robot en la estación de trabajo o la zona de trabajo en un dispositivo o una instalación metalúrgica o de laminación; en donde el sistema de interacción de robot comprende el robot con su zona de trabajo y movimiento; un sistema de sensores de seguridad con las funciones de la detección de presencia humana y el monitoreo de la estación de trabajo para condiciones peligrosas; un controlador de…
Pasador de cizallamiento para calibración de robots.
(01/04/2020). Solicitante/s: ABB SCHWEIZ AG. Inventor/es: OLSSON, MATS, ANDERSSON, HANS, DANIELSSON, STEFAN, GÖRANSSON,ANDREAS, FIXELL,PETER, VIILUP,SIIM, HANSSEN,SVEN.
Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot , comprendiendo el pasador de cizallamiento :
un cuerpo alargado que comprende una zona de debilitamiento que define una ubicación de rotura en caso de sobrecarga,
caracterizado por que la ubicación de rotura está cubierta con una protección que impide la fragmentación cuando se rompe el pasador de cizallamiento.
PDF original: ES-2799889_T3.pdf
Dispositivo automatizado con una estructura móvil, en concreto un robot.
(19/02/2020) Dispositivo automatizado , en concreto, un robot, que comprende:
- una estructura móvil (4 a 8; 103; 203; 301);
- medios de accionamiento (M; 102; 202), para provocar desplazamientos de la estructura móvil (4 a 8; 103; 203; 301);
- un sistema de control, que incluye una unidad de control y es capaz de controlar los medios de accionamiento (M; 102; 202);
- una cubierta sensorizada , que cubre, como mínimo, una parte de la estructura móvil (4 a 8; 103; 203; 301) e integra medios de detección (C, P) que incluyen, como mínimo, uno de medios de detección de contacto (C) y medios de detección de proximidad (P);
en el que la cubierta sensorizada comprende una pluralidad de módulos de cubierta (21 a 39; 110 a 113; 201 a 2011; 321 a 328), teniendo cada uno una estructura de soporte de carga respectiva de una forma predefinida,…
Cobertura sensorizada para dispositivo industrial.
(19/02/2020) Dispositivo automatizado , en concreto, un robot, que comprende:
- una estructura móvil (4 a 8; 103; 203; 301);
- medios de accionamiento (M; 102; 202), para provocar desplazamientos de la estructura móvil (4 a 8; 103; 203; 301);
- un sistema de control , que incluye una unidad de control y es capaz de controlar los medios de accionamiento (M; 102; 202);
- una cobertura sensorizada , que cubre, como mínimo, una parte de la estructura móvil (4 a 8; 103; 203; 301)
en el que la cobertura sensorizada integra medios de sensor (C, P) que incluyen, como mínimo, uno de medios de sensor de contacto (C) y medios de sensor de proximidad (P),
en el que la cobertura sensorizada comprende una pluralidad de módulos (21 a 39; 110 a 113; 201 a 2011; 321 a 328) de cobertura, teniendo cada uno una…
Efector final magnético y dispositivo para guiar y posicionar el mismo.
(20/11/2019) Dispositivo de guiado extracorpóreo para un objeto magnético intracorpóreo con un dispositivo de posicionamiento accionado a motor que tiene como máximo tres grados de libertad a activar, a saber, para el movimiento traslativo de una interfaz de conexión distal del dispositivo de posicionamiento en un sistema de coordenadas espaciales extracorpóreo al que está conectado o se puede conectar un efector final del dispositivo de guiado extracorpóreo, que tiene como máximo dos grados de libertad a activar, a saber, para el movimiento rotativo de un generador de campo magnético , preferiblemente imanes permanentes del efector final , caracterizado por que el dispositivo de posicionamiento tiene un número salientes o brazos accionados respectivamente por motor, de los que los salientes…
Dispositivo de diagnóstico de fallos y método de diagnóstico de fallos.
(09/10/2019) Un dispositivo de diagnóstico de fallos aplicable a un dispositivo mecánico provisto de un motor como fuente para accionar un eje de movimiento, y configurado para adquirir una posición de movimiento del eje de movimiento y un valor del par de perturbación aplicado al eje de movimiento cada período predeterminado, y para diagnosticar que se está produciendo un fallo cuando el valor del par de perturbación es mayor que un umbral de determinación de fallos, que comprende:
una unidad de diagnóstico de fallos configurada para restablecer el umbral de determinación de fallos, caracterizado por que comprende además:
una unidad de determinación de efectos de mantenimiento configurada para calcular un cambio en el valor del par de perturbación antes y después…
Conjunto funcional para una máquina industrial, en concreto para un robot, que incluye una unidad funcional equipada con una cubierta de seguridad.
(18/09/2019) Conjunto funcional para una máquina industrial, en particular para un robot, comprendiendo dicho conjunto funcional:
- un bastidor de soporte, provisto de un reborde para ser sujetada a una muñeca de robot o a otro elemento de una máquina industrial,
- una unidad funcional , por ejemplo, una herramienta de sujeción o una herramienta de operario, soportada por dicho bastidor de soporte,
- una cubierta de seguridad para dicha unidad funcional , que está dispuesta en dicho bastidor de soporte, y que define un volumen de contención,
- en el que dicho conjunto funcional puede asumir una primera configuración funcional, en el que dicha cubierta de seguridad rodea y cubre dicha unidad funcional , y una segunda configuración funcional, en el que dicha unidad funcional está, como mínimo parcialmente, fuera del volumen de…
Mecanismo de conformidad pasiva.
(24/07/2019) Un mecanismo (10, 10') de conformidad pasiva, que comprende:
un miembro de fijación;
una base instalada sobre el miembro de fijación, y que comprende dos entallas y un tramo elástico, en el que las dos entallas están dispuestas una al lado de la otra, estando el tramo elástico dispuesto entre las dos entallas y sobresalen por fuera de la base en dirección a una periferia exterior del miembro de fijación, un primer extremo del tramo elástico está conectado con la base y un segundo extremo del tramo elástico está situado cerca de la periferia exterior del miembro de fijación; y un montaje de ajuste de la rigidez está instalado sobre el miembro de fijación,…
Sistema de inclinación de herramienta.
(17/04/2019) Un sistema de inclinación de herramienta, que comprende:
• una base para asegurar el citado sistema a una estructura que debe llevar una herramienta , tal como un brazo de robot;
- un soporte sobre el cual se debe fijar la citada herramienta , estando configurado el citado soporte de tal manera que la citada herramienta fijada al citado soporte puede definir un eje de trabajo (S) ;
- un miembro de conexión , que se dispone entre el citado soporte y la citada base y está diseñado para conectar el citado soporte a la citada base , permitiendo el citado miembro un movimiento angular dado del citado soporte de manera que el citado eje de trabajo se desplaza, comenzando desde…
Efector final magnético y dispositivo para guiar y posicionar el mismo.
(03/04/2019). Solicitante/s: Ovesco Endoscopy AG. Inventor/es: GOTTWALD, THOMAS, SCHURR,MARC O.,DR, SCHOSTEK,SEBASTIAN.
Dispositivo de guiado extracorpóreo para un objeto magnético intracorpóreo con un dispositivo de posicionamiento accionado a motor que tiene un máximo de tres grados de libertad a activar, a saber, para el movimiento traslativo de una interfaz de conexión distal del dispositivo de posicionamiento en un sistema de coordenadas espaciales extracorpóreo al que está conectado un efector final del dispositivo de guiado extracorpóreo, que tiene un máximo de dos grados de libertad a activar, a saber, para el movimiento rotativo de un generador de campo magnético , preferiblemente imanes permanentes del efector final , caracterizado por que al menos uno de los dos grados de libertad del generador de campo magnético está alojado en una carcasa de efector (104a).
PDF original: ES-2733430_T3.pdf
Seguridad de un robot de carácter humanoide.
(03/12/2018). Solicitante/s: Softbank Robotics Europe. Inventor/es: CLERC,VINCENT.
Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une los dos elementos , permitiendo la articulación un abatimiento en un intervalo dado (a) en funcionamiento operativo, estando destinado uno primero de los dos elementos a ponerse en contacto con un tope que pertenece a uno segundo de los dos elementos en el extremo del intervalo (a), caracterizado porque comprende además al menos un interruptor configurado para accionar un contacto eléctrico cuando una fuerza ejercida por el primer elemento contra el tope sobrepasa una fuerza dada.
PDF original: ES-2692417_T3.pdf
Sistema anti-atrapamiento en un robot de carácter humanoide.
(03/12/2018). Solicitante/s: Softbank Robotics Europe. Inventor/es: CLERC,VINCENT, MUGNIER,FABIEN.
Robot de carácter humanoide que comprende dos elementos y una articulación de al menos un grado de libertad que une los dos elementos, comprendiendo los dos elementos cada uno una piel que delimita su superficie externa, permitiendo la articulación un abatimiento en un intervalo dado, estando destinado uno primero de los dos elementos a ponerse sustancialmente en contacto con una zona de la piel de un segundo de los dos elementos en un extremo del intervalo, siendo la zona flexible tal que permita su deformación en una distancia dada con una fuerza inferior a una fuerza dada, caracterizado porque el primer elemento se acopla al segundo elemento atravesando la zona flexible.
PDF original: ES-2692415_T3.pdf
Dispositivo de seguridad de mordazas de agarre con ranura y lengüeta para una colaboración hombre-robot.
(27/11/2018). Solicitante/s: KUKA SYSTEMS GMBH. Inventor/es: STOCKSCHLÄDER,JULIAN, BOZADA,ZAFER, MARIS,TUNCAY.
Dispositivo de agarre , en particular como efector para un robot industrial, dispositivo de agarre que comprende: primeras y segundas mordazas de sujeción, que están orientadas de manera que pueden acercarse unas a otras para agarrar una pieza de trabajo, presentando la primera mordaza de sujeción un saliente de lengüeta en el lado que indica hacia la segunda mordaza de sujeción y la segunda mordaza de sujeción presenta en el lado que indica hacia la primera mordaza de sujeción una ranura correspondiente que aloja al menos parcialmente el saliente de lengüeta en el estado de las mordazas de sujeción aproximadas las unas hacia las otras, en donde en el estado separado de las mordazas de sujeción el espacio entre ambas mordazas de sujeción está ocupado al menos parcialmente por el saliente de lengüeta , para impedir una introducción involuntaria de objetos o de partes del cuerpo en el espacio ocupado.
PDF original: ES-2691374_T3.pdf
Equipo robótico con un robot con un dispositivo de protección.
(02/05/2018) Un equipo robótico con un robot, preferiblemente un robot industrial, con un dispositivo de protección y con al menos dos puestos de trabajo que comprenden respectivamente una mesa de trabajo, entre las que se dispone el robot, de manera que un operario puede equipar la mesa de trabajo de piezas en uno de los puestos, mientras que el robot trabaja en la mesa de trabajo del otro puesto, caracterizado porque los puestos se asignan al robot en una cabina de tal manera, que el robot puede trabajar en cualquier puesto, porque, con el eje vertical del robot , se une una pared protectora cilíndrica de manea resistente a la torsión, que está abierta…
Instrumentos quirúrgicos articulados y métodos para desplegar los mismos.
(11/04/2018). Solicitante/s: Medrobotics Corporation. Inventor/es: FLAHERTY, J., CHRISTOPHER, OYOLA,ARNOLD, CASTRO,MICHAEL SALVATORE.
Una herramienta quirúrgica que comprende:
un primer conjunto alargado que comprende una región de articulación ; y
un segundo conjunto alargado que comprende:
un elemento de soporte alargado ;
un elemento de activación alargado móvil con respecto al elemento de soporte; y
un mecanismo funcional acoplado al elemento de activación, siendo un movimiento del mecanismo funcional en respuesta a un movimiento del elemento de activación, donde una fuerza impartida por el movimiento del elemento de activación se aísla del primer conjunto por el elemento de soporte, caracterizado por que el segundo conjunto comprende, además, una horquilla acoplada al elemento de soporte y donde la herramienta quirúrgica comprende, además, una holgura longitudinal entre la horquilla y un extremo distal del primer conjunto, donde el segundo conjunto está en comunicación con el primer conjunto de manera que el elemento de soporte pueda moverse con respecto al primer conjunto.
PDF original: ES-2668307_T3.pdf
Procedimiento de protección y dispositivo de protección para un aparato de manipulación.
(10/05/2017). Solicitante/s: Blue Danube Robotics GmbH. Inventor/es: ZILLICH,MICHAEL.
Procedimiento para proteger personas y obstáculos estacionarios o movidos de manera autónoma, que se encuentran delante de unos aparatos de manipulación estacionarios o movidos de forma autónoma, tales como robots de fabricación, transporte, inspección o servicio y sus manipuladores, frente a colisiones en la zona de trabajo de estos aparatos de manipulación por medio de unos elementos de protección configurados como envolturas de protección y rellenables con un medio y con uno o varios sensores de presión interiores, caracterizado por que el medio no es suministrado a presión desde fuera a cada elemento de protección individual , sino que una sobrepresión es generada en el interior del elemento de protección, y además de uno o varios sensores de presión , también presenta un dispositivo de aumento de presión interior.
PDF original: ES-2672385_T3.pdf
Robot industrial y procedimiento de control de un robot industrial.
(11/05/2016) Un robot industrial que comprende:
- un manipulador con un número de grados de libertad (A1-A6), que tiene una estructura mecánica que comprende una pluralidad de partes móviles, entre las cuales un efector de extremo y una o más articulaciones de conexión accionadas por motores (11'-14') eléctricos con correspondientes transductores (S) de posición asociados;
- una unidad de control del manipulador , que comprende medios de selección operables por un usuario para la selección de una pluralidad de posibles modos de operación del robot , entre los cuales al menos un modo de operación automático;
- un primer sistema de detección, para detectar la posible presencia de un cuerpo extraño (HO) en un área de trabajo predefinida del manipulador , en particular, un ser humano;
- un segundo…
ROBOT CON SOPORTE PORTA HERRAMIENTAS.
(16/06/2015) Robot con soporte portaherramientas, siendo del tipo de robots utilizados en la manipulación de artefactos sospechosos, los cuales disponen de un brazo articulado, rematado en una pinza, a través de la cual manipulan los artefactos, de forma que el extremo libre del brazo articulado o la pinza incorporan una cámara de visión, y el cuerpo del robot monta un soporte porta herramientas, definido por una estructura de forma general en "U" que por sus alas se ancla al cuerpo del robot y en su alma presenta, al menos, dos habitáculos de alojamiento de respectivas herramientas asociadas a un conjunto definido por: la herramienta en sí; una batería de alimentación…
ARTICULACIÓN CON RIGIDEZ CONTROLABLE Y DISPOSITIVO DE MEDICIÓN DE FUERZA.
(18/12/2014). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Inventor/es: GARCIA ARMADA,ELENA, CESTARI SOTO,Manuel Javier, SANZ MERODIO,Daniel.
El objeto de la invención es una articulación con rigidez controlable y medición de fuerza, comprende un primer dispositivo , que comprende un marco con una cara curva, conectado con un primer elemento motor , realizando este primer dispositivo la regulación de la posición de la articulación , y un segundo dispositivo que regula la rigidez de la articulación , que comprende un elemento de empuje cuyo desplazamiento (D) determina una pre-compresión de un elemento resistivo determinando de este modo la rigidez de la articulación , y el primer elemento motor proporciona un giro al marco tal que una rueda del segundo dispositivo recorre la cara curva del marco generando una compresión (C) del elemento resistivo a través de una barra de transmisión asociada a dicha rueda y al elemento resistivo.
DISPOSITIVO ELECTRÓNICO DE PARADA DE EMERGENCIA CON REPOSICIÓN AUTOMÁTICA SUPERVISADA.
(18/07/2014) 1. Dispositivo de parada de emergencia para una máquina caracterizado porque comprende:
- un circuito de monitorización configurado para determinar el estado del circuito de parada de emergencia de la máquina ,
- un pulsador de reposición manual ,
- un circuito de enclavamiento y reposición conectado con el circuito de parada de emergencia para enclavarlo y/o reponerlo automáticamente, teniendo en cuenta la información que recibe de una unidad de procesamiento ,
- una unidad de procesamiento configurada para recibir y enviar información a un sistema de supervisión externo , recibir información del circuito de monitorización y del pulsador de reposición manual , y actuar sobre el circuito de enclavamiento y reposición .
2.…
Acoplamiento flexible de seguridad frente a impactos.
(24/06/2014) Acoplamiento flexible de seguridad frente a impactos, del tipo de los utilizados en eslabones de brazos robóticos y que incorporan algún mecanismo que permite variar el nivel de carga a partir del cual entra en funcionamiento la flexibilidad del acoplamiento. El acoplamiento incorpora una pieza y una pieza cilíndricas huevas enfrentadas por sus bases, las cuales disponen de una multitud de hendiduras y protuberancias que insertan perfectamente. Un resorte helicoidal apoya en la cara interior de la base de la pieza y en el otro extremo del resorte se fija el extremo de un cable , el cual atraviesa…
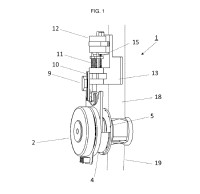
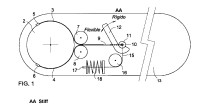
ACTUADOR CON MECANISMO DE RIGIDEZ VARIABLE Y PAR UMBRAL.
(03/01/2014). Ver ilustración. Solicitante/s: UNIVERSIDAD DE ALMERIA. Inventor/es: JARDON HUETE,ALBERTO, LÓPEZ MARTÍNEZ,JAVIER, GIMÉNEZ FERNÁNDEZ,Antonio, TORRES MORENO,José Luis, GARCÍA VALLEJO,Daniel, SÁNCHEZ SALINAS,Silvia.
Actuador con mecanismo de rigidez variable y par umbral, del tipo de los utilizados en articulaciones de revolución de brazos robóticos y que pueden modificar su rigidez. El actuador incorpora un motor que se encarga de controlar la posición de equilibrio del eslabón de salida . El mecanismo contiene un resorte y una palanca . La rigidez del mecanismo puede ser modificada variando la posición de esta palanca mediante un motor . Dicha rigidez determina el valor del giro entre la posición de la polea solidaria al eje de salida del motor y la posición del eslabón . Dos tensores y permiten modificar la precarga de dos cables y respectivamente, de forma que el mecanismo no entra en funcionamiento hasta que no se ha sobrepasado un cierto valor de par sobre la articulación.
SISTEMA CON FINES DE DETECCIÓN Y PREVENCIÓN ACTIVA E INMEDIATA DE RIESGOS EN MAQUINARIA INDUSTRIAL.
(30/08/2013) Sistema con fines de detección y prevención activa en inmediata de riesgos en maquinaria industrial.
La presente invención se refiere a un sistema de detección y prevención de peligros o riesgos laborales en maquinaria industrial mediante monitorización visual continua del entorno de operación de la maquinaria y análisis de las imágenes de vídeo capturadas, que comprende para ello al menos una cámara capaz de cubrir de forma conjunta la zona de trabajo ocupada por la maquinaria y su entorno de seguridad.
La información digital obtenida desde ésta una o más cámaras permite la observación en detalle de los sucesos ocurridos en dicha primera zona de trabajo y dicho entorno de seguridad.
El sistema además comprende un módulo de control que analiza la información proveniente de la o las cámaras y que determina la existencia de riesgos laborales en el…
SISTEMA CON FINES DE DETECCIÓN Y PREVENCIÓN ACTIVA E INMEDIATA DE RIESGOS EN MAQUINARIA INDUSTRIAL.
(27/06/2013) La presente invención se refiere a un sistema de detección y prevención de peligros o riesgos laborales en maquinaria industrial mediante monitorización visual continua del entorno de operación de la maquinaria y análisis de las imágenes de vídeo capturadas, que comprende para ello al menos una cámara capaz de cubrir de forma conjunta la zona de trabajo ocupada por la maquinaria y su entorno de seguridad. La información digital obtenida desde esta una o más cámaras permite la observación en detalle de los sucesos ocurridos en dicha primera zona de trabajo y dicho entorno de seguridad. El sistema además comprende un módulo de control que analiza la información proveniente de la o las cámaras y que determina la existencia de riesgos laborales en el entorno…
Dispositvo de protección contra colisiones.
(25/03/2013) Dispositivo de protección contra colisiones para unir un soplete de soldadura unido mediante un paquete demangueras con un brazo de robot de un robot de soldadura, con dos elementos de acoplamiento que puedenunirse entre sí de modo liberable por medio de unos imanes , donde uno de los elementos de acoplamiento estárealizado para ser unido al soplete de soldadura o a un acoplamiento del soplete que puede unirse con el sopletede soldadura , y el otro elemento de acoplamiento está realizado para unirlo con el brazo del robot , presentandolos elementos de acoplamiento unos orificios , caracterizado porque los orificios en los elementosde acoplamiento están realizados para el paso del paquete de mangueras , comprendiendo el elemento deacoplamiento un acoplamiento del soplete…
Actuador con mecanismo de rigidez variable y par umbral.
(05/02/2013) Actuador con mecanismo de rigidez variable y par umbral, del tipo de los utilizados en articulaciones de revolución de brazos robóticos y que pueden modificar su rigidez. El actuador incorpora un motor que se encarga de controlar la posición de equilibrio del eslabón de salida . El mecanismo contiene un resorte y una palanca . La rigidez del mecanismo puede ser modificada variando la posición de esta palanca mediante un motor . Dicha rigidez determina el valor del giro entre la posición de la polea solidaria al eje de salida del motor y la posición del eslabón . Dos tensores y permiten modificar la precarga de dos cables y respectivamente, de forma que el mecanismo no entra en funcionamiento hasta que no se ha sobrepasado un cierto valor de par sobre la articulación.
MÉTODO PARA CONTROLAR UNA PLURALIDAD DE EJES EN UN SISTEMA DE ROBOT INDUSTRIAL Y SISTEMA DE ROBOT INDUSTRIAL.
(01/07/2011) Un sistema de robot industrial que comprende: una celda de trabajo que incluye un área de carga y un área de proceso (9a,9b; 28,30,26; 36,37; 38,39), al menos un detector (6,6a-b) que detecta cuando una persona ingresa al área de carga de la celda de trabajo, un manipulador ubicado en la celda de trabajo y adaptado para procesar una pieza de trabajo, al menos un posicionador (4,5; 10a-d; 2,24; 32,34) adaptado para sostener la pieza de trabajo y cambiar la orientación de la pieza de trabajo respecto de al menos un eje mientras el manipulador procesa la pieza de trabajo, un intercambiador de estación que se puede…
DISPOSITIVO DE PROTECCIÓN PARA UNA ESTACIÓN PARA PROCESOS, PROCEDIMIENTO PARA LA CARGA Y/O DESCARGA AUTOMÁTICA DE UNA ESTACIÓN PARA PROCESOS.
(24/06/2011) Estación para procesos tales como, por ejemplo, comprobar, montar, clasificar, compactar, rellenar, mecanizar y/o similares, en la que la estación presenta al menos una abertura que sirve para la carga de piezas de trabajo en la estación y/o para la descarga de piezas de trabajo de la estación , y la abertura se puede cerrar al menos parcialmente para la protección de un operador mediante un dispositivo de protección , caracterizada porque el dispositivo de protección es una célula móvil de robot, que en caso de necesidad se puede retirar de la abertura para su liberación, en la que en la célula de robot está…
(09/03/2011) Mecanismo paralelo, que comprende: una pluralidad de brazos acoplados entre sí en paralelo, incluyendo cada uno de los brazos un primer elemento de unión, uno de cuyos extremos está acoplado a un actuador fijado a una parte de base, un segundo elemento de unión a través del que el otro extremo del primer elemento de unión y una palomilla están acoplados entre sí, una junta esférica a través de la que un extremo del segundo elemento de unión y el otro extremo del primer elemento de unión están acoplados entre sí de manera oscilante, y una junta esférica a través de la que el otro extremo del segundo elemento de unión y la palomilla están acoplados entre sí de manera oscilante, y medios de detección para…
DISPOSITIVO PARA DESPLAZAR Y POSICIONAR UN OBJETO EN EL ESPACIO.
(19/08/2010) Dispositivo para desplazar y posicionar un objeto en el espacio, con al menos tres brazos de accionamiento unidos en cada caso a una unidad de motor/transmisión y que pueden bascular alrededor de un eje de transmisión (s), un elemento soporte previsto para disponer al menos un medio de agarre para agarrar el objeto, en donde cada brazo de accionamiento presenta en su extremo libre un primer eje de articulación (m) situado en paralelo al eje de transmisión (s), con primeras partes de articulación dispuestas separadas entre sí en cada caso de una primera articulación de rótula , el elemento soporte presenta en cada caso un segundo eje de articulación (n) asociado a cada brazo de accionamiento con primeras partes de articulación dispuestas separadas…
{kind=link}
{kind=link}