MECANISMO PARALELO.
Mecanismo (1) paralelo, que comprende: una pluralidad de brazos (6) acoplados entre sí en paralelo,
incluyendo cada uno de los brazos (6) un primer elemento (7) de unión, uno de cuyos extremos está acoplado a un actuador (4) fijado a una parte (2) de base, un segundo elemento (8) de unión a través del que el otro extremo del primer elemento (7) de unión y una palomilla (14) están acoplados entre sí, una junta (16, 17) esférica a través de la que un extremo del segundo elemento (8) de unión y el otro extremo del primer elemento (7) de unión están acoplados entre sí de manera oscilante, y una junta (18, 19) esférica a través de la que el otro extremo del segundo elemento (8) de unión y la palomilla (14) están acoplados entre sí de manera oscilante, y medios (44) de detección para detectar cuándo al menos una de las juntas (16, 17, 18, 19) esféricas está suelta, teniendo cada una de las juntas (16, 17, 18, 19) esféricas un pasador (30) esférico que incluye una cabeza (31) de tipo esférico, un casquillo (35) que sujeta de manera oscilante la cabeza (31) de tipo esférico del pasador (30) esférico, caracterizado por un elemento (36) conductor interpuesto entre la cabeza (31) de tipo esférico y el casquillo (35), y porque los medios (44) de detección detectan cuándo alguna de las juntas (16, 17, 18, 19) esféricas está suelta, basándose en si el pasador (30) esférico y el casquillo (35) tienen o no continuidad eléctrica
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09003960.
Solicitante: MURATA MACHINERY, LTD.
Nacionalidad solicitante: Japón.
Dirección: 3 MINAMI OCHIAI-CHO, KISSHOIN, MINAMI-KU KYOTO-SHI, KYOTO 6018326 JAPON.
Inventor/es: NAKAO, TAKASHI, Nishida,Tatsuhiko , Nakanishi,Hideaki , Yamashita,Manabu.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Marzo de 2009.
Clasificación Internacional de Patentes:
- B25J13/08S
- B25J17/02F2
- B25J17/02G
- B25J19/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F). › Dispositivos de seguridad.
- B25J9/10L2
Clasificación PCT:
- B25J13/08 B25J […] › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › por medio de dispositivos sensores, p. ej. a la visión o al tacto.
- B25J17/02 B25J […] › B25J 17/00 Uniones. › Uniones articuladas.
- B25J19/06 B25J 19/00 […] › Dispositivos de seguridad.
- B25J9/10 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
- H02H3/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02H CIRCUITOS DE PROTECCION DE SEGURIDAD (indicación o señalización de condiciones de trabajo indeseables G01R, p. ej. G01R 31/00, G08B; localización de defectos a lo largo de las líneas G01R 31/08; dispositivos de protección H01H). › Circuitos de protección de seguridad para desconexión automática respondiendo directamente a un cambio indeseado de las condiciones eléctricas normales de trabajo con o sin reconexión (especialmente adaptados para máquinas o aparatos de tipos especiales o para la protección seccional de sistemas de cables o líneas H02H 7/00; sistemas para conmutación de la alimentación de reserva H02J 9/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
ANTECEDENTES DE LA INVENCIÓN
Campo de la invención 5
La presente invención se refiere a un mecanismo paralelo, y en particular, a un mecanismo paralelo que incluye un par de brazos acoplados entre sí a través de una junta esférica.
Descripción de la técnica relacionada
Se conoce un mecanismo paralelo en el que una parte de base que es una base de soporte y una palomilla con un efector de extremo fijado a la misma están acopladas entre sí en paralelo a través de una 10 pluralidad de brazos. Esto es, en el mecanismo paralelo, unos motores eléctricos están dispuestos en paralelo. Además, una pluralidad de brazos acoplados a los motores respectivos hacen funcionar en última instancia una palomilla.
En cada brazo, una bola y un casquillo previsto en una junta esférica se sujetan mediante la fuerza de tensión de un resorte. Sin embargo, una mitad de la bola de la junta esférica se expone desde el 15 casquillo. Por tanto, cuando la junta esférica está sometida a una carga que sobrepasa la fuerza de tensión del resorte, la bola puede soltarse del casquillo. Sin embargo, algunas técnicas convencionales para el mecanismo paralelo no tienen en cuenta la detección de un posible aflojamiento de la junta esférica. Por tanto, incluso aunque la junta esférica se suelte, el mecanismo paralelo continúa funcionando sin tomar medidas, es decir, con la junta esférica aún suelta. Cuando el mecanismo paralelo continúa funcionando 20 con la junta esférica aún suelta, el brazo o similar puede dañarse. Por tanto, ha existido la necesidad de detectar cuándo está suelta la junta esférica, a través de la que los brazos o similares están acoplados entre sí de manera oscilante.
El documento US-2005/0177279 corresponde al preámbulo de la reivindicación 1.
La presente invención se ha realizado para solucionar estos problemas. La presente invención 25 permite detectar un posible aflojamiento de la junta esférica, a través de la que los brazos o similares están acoplados entre sí de manera oscilante. A continuación se describirá una realización preferida de la presente invención.
La presente invención proporciona un mecanismo paralelo que comprende una pluralidad de brazos acoplados entre sí en paralelo e incluyendo cada uno un primer elemento de unión uno de cuyos 30 extremos está acoplado a un actuador fijado a una parte de base, un segundo elemento de unión a través del que el otro extremo del primer elemento de unión y una palomilla están acoplados entre sí, una junta esférica a través de la que un extremo del segundo elemento de unión y el otro extremo del primer elemento de unión están acoplados entre sí de manera oscilante, y una junta esférica a través de la que el otro extremo del segundo elemento de unión y la palomilla están acoplados entre sí de manera oscilante, 35 en el que el mecanismo paralelo incluye medios de detección para detectar cuándo al menos una de las juntas esféricas está suelta, y cada una de las juntas esféricas tiene un pasador esférico que incluye una cabeza de tipo esférico, un casquillo que sujeta de manera oscilante y móvil de forma pivotante la cabeza de tipo esférico del pasador esférico, y un elemento conductor interpuesto entre la cabeza de tipo esférico y el casquillo, y en el que los medios de detección detectan cuándo alguna de las juntas esféricas está 40 suelta, basándose en si el pasador esférico y el casquillo tienen o no continuidad eléctrica.
Según un aspecto preferido de la presente invención, un elemento conductor está interpuesto entre la cabeza de tipo esférico del pasador esférico y el casquillo; el pasador esférico y el casquillo componen la junta esférica. Por tanto, con la cabeza de tipo esférico del pasador esférico sujeta en el casquillo, el pasador esférico y el casquillo tienen continuidad eléctrica a través del elemento conductor. 45 Por otro lado, cuando se suelta la junta esférica, es decir, cuando la cabeza de tipo esférico del pasador esférico se suelta del casquillo, el pasador esférico y el casquillo se vuelven eléctricamente discontinuos. Por tanto, puede detectarse un posible aflojamiento de la junta esférica basándose en si el pasador esférico y el casquillo tienen o no continuidad eléctrica. Esto permite detectar un posible aflojamiento de la junta esférica a través de la que un extremo del segundo elemento de unión y el otro extremo del primer 50 elemento de unión están acoplados entre sí de manera oscilante y/o la junta esférica a través de la que el otro extremo del segundo elemento de unión y la palomilla están acoplados entre sí de manera oscilante.
En un aspecto más preferido, los medios de detección detectan cuándo alguna de las juntas esféricas está suelta, basándose en si un circuito de detección de unidad formado por el pasador esférico, el elemento conductor y el casquillo tiene o no continuidad eléctrica.
En este caso, puede detectarse un posible aflojamiento para cada una de las juntas esféricas.
En un aspecto más preferido, los medios de detección detectan cuándo alguna de las juntas 5 esféricas está suelta, basándose en si un circuito de detección ensamblado tiene o no continuidad eléctrica, en el que una pluralidad de circuitos de detección de unidad formado cada uno por el pasador esférico, el elemento conductor y el casquillo están conectados entre sí en serie.
Por tanto, el circuito de detección ensamblado se vuelve eléctricamente discontinuo cuando se suelta al menos alguna de la pluralidad de juntas esféricas que componen la pluralidad de circuitos de 10 detección de unidad incluidos en el circuito de detección ensamblado. Por consiguiente, puede detectarse por completo un posible aflojamiento de las juntas esféricas.
En un aspecto más preferido, el segundo elemento de unión tiene varillas por pares. La junta esférica a través de la que un extremo del segundo elemento de unión y el otro extremo del primer elemento de unión están acoplados entre sí y la junta esférica a través de la que el otro extremo del 15 segundo elemento de unión y la palomilla están acoplados entre sí se proporcionan en las varillas por pares respectivas como un par. En el circuito de detección ensamblado, los circuitos de detección de unidad formado cada uno para las cuatro juntas esféricas previstas en el segundo elemento de unión están conectados entre sí en serie.
En este caso, la continuidad eléctrica del circuito de detección ensamblado se vuelve 20 eléctricamente discontinua cuando se suelta al menos alguna de un total de cuatro juntas esféricas previstas en las varillas por pares que componen el segundo elemento de unión. Por tanto, el circuito de detección puede detectar por completo cuándo está suelta alguna de las cuatro juntas esféricas previstas en las varillas por pares.
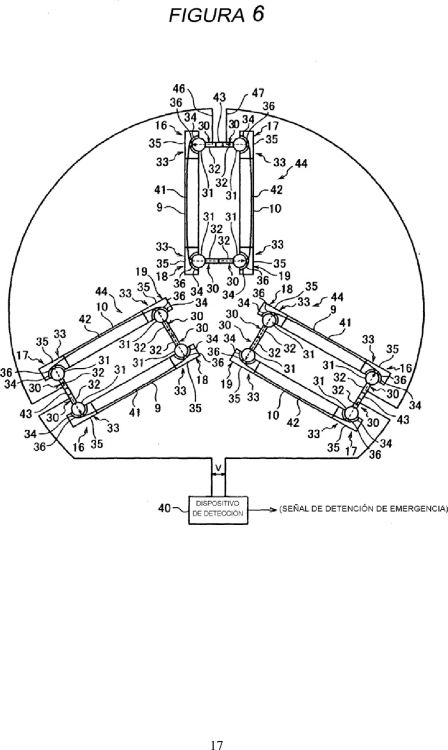
Además, preferiblemente, el mecanismo paralelo incluye tres brazos, y el segundo elemento de 25 unión tiene varillas por pares. La junta esférica a través de la que un extremo del segundo elemento de unión y el otro extremo del primer elemento de unión están acoplados entre sí y la junta esférica a través de la que el otro extremo del segundo elemento de unión y la palomilla están acoplados entre sí se proporcionan en varillas por pares, respectivamente, como un par. En el circuito de detección ensamblado, los circuitos de detección de unidad formados para las doce juntas esféricas previstas en los tres brazos 30 están conectados entre sí en serie.
Por tanto, el circuito de detección ensamblado se vuelve eléctricamente discontinuo cuando se suelta al menos alguna de un total de doce juntas esféricas usadas en los tres brazos que componen el mecanismo paralelo. Por consiguiente, el circuito de detección puede detectar por completo cuándo está suelta alguna de las doce juntas esféricas usadas en los tres brazos. 35
En un aspecto más preferido de la presente invención, los medios de detección determinan que alguna de las juntas esféricas está suelta cuando la junta esférica permanece en discontinuidad eléctrica al menos durante un tiempo predeterminado.
Por tanto, incluso aunque se produzca vibración o interrupción instantánea durante el funcionamiento del mecanismo paralelo, puede evitarse una posible detección errónea. 40
En un aspecto más preferido de la presente invención, el mecanismo paralelo incluye medios de detección para detener el accionamiento del actuador cuando los medios...
Reivindicaciones:
55
1. Mecanismo (1) paralelo, que comprende:
una pluralidad de brazos (6) acoplados entre sí en paralelo, incluyendo cada uno de los brazos (6) un primer elemento (7) de unión, uno de cuyos extremos está acoplado a un actuador (4) fijado a una parte (2) de base, un segundo elemento (8) de unión a través 5 del que el otro extremo del primer elemento (7) de unión y una palomilla (14) están acoplados entre sí, una junta (16, 17) esférica a través de la que un extremo del segundo elemento (8) de unión y el otro extremo del primer elemento (7) de unión están acoplados entre sí de manera oscilante, y una junta (18, 19) esférica a través de la que el otro extremo del segundo elemento (8) de unión y la palomilla (14) están acoplados entre sí 10 de manera oscilante, y
medios (44) de detección para detectar cuándo al menos una de las juntas (16, 17, 18, 19) esféricas está suelta,
teniendo cada una de las juntas (16, 17, 18, 19) esféricas un pasador (30) esférico que incluye una cabeza (31) de tipo esférico, un casquillo (35) que sujeta de manera oscilante 15 la cabeza (31) de tipo esférico del pasador (30) esférico, caracterizado por un elemento (36) conductor interpuesto entre la cabeza (31) de tipo esférico y el casquillo (35), y porque los medios (44) de detección detectan cuándo alguna de las juntas (16, 17, 18, 19) esféricas está suelta, basándose en si el pasador (30) esférico y el casquillo (35) tienen o no continuidad eléctrica. 20
2. Mecanismo (1) paralelo según la reivindicación 1, caracterizado porque los medios (44) de detección detectan cuándo alguna de las juntas (16, 17, 18, 19) esféricas está suelta, basándose en si un circuito de detección de unidad formado por el pasador (30) esférico, el elemento (36) conductor y el casquillo (35) tiene o no continuidad eléctrica.
3. Mecanismo (1) paralelo según la reivindicación 1, caracterizado porque los medios (44) de 25 detección detectan cuándo alguna de las juntas (16, 17, 18, 19) esféricas está suelta, basándose en si un circuito de detección ensamblado tiene o no continuidad eléctrica, en el que una pluralidad de circuitos de detección de unidad formado cada uno por el pasador (30) esférico, el elemento (36) conductor y el casquillo (35) están conectados entre sí en serie.
4. Mecanismo paralelo según la reivindicación 3, caracterizado porque el segundo elemento (8) de 30 unión tiene varillas (9, 10) por pares,
la junta (16, 17) esférica a través de la que un extremo del segundo elemento (8) de unión y el otro extremo del primer elemento (7) de unión están acoplados entre sí y la junta (18, 19) esférica a través de la que el otro extremo del segundo elemento (8) de unión y la palomilla (14) están acoplados entre sí se proporcionan en las varillas (9, 10) por pares respectivas como un par, y 35
en el circuito (44) de detección ensamblado, los circuitos de detección de unidad formado cada uno para las cuatro juntas (16, 17, 18, 19) esféricas previstas en el segundo elemento (8) de unión están conectados entre sí en serie.
5. Mecanismo paralelo según la reivindicación 3, caracterizado porque el mecanismo (1) paralelo comprende tres brazos (6), 40
el segundo elemento (8) de unión tiene varillas (9, 10) por pares,
la junta (16, 17) esférica a través de la que un extremo del segundo elemento (8) de unión y el otro extremo del primer elemento (7) de unión están acoplados entre sí y la junta (18, 19) esférica a través de la que el otro extremo del segundo elemento (8) de unión y la palomilla (14) están acoplados entre sí se proporcionan en las varillas (9, 10) por pares respectivas como un par, 45
en el circuito (44) de detección ensamblado, los circuitos de detección de unidad formados para las doce juntas (16, 17, 18, 19) esféricas previstas en los tres brazos (6) están conectados entre sí en serie.
6. Mecanismo (1) paralelo según una cualquiera de las reivindicaciones 1 a 5, caracterizado porque los medios (44) de detección determinan que alguna de las juntas (16, 17, 18, 19) esféricas está 50 suelta cuando la junta esférica permanece en discontinuidad eléctrica al menos durante un tiempo predeterminado.
7. Mecanismo paralelo según una cualquiera de las reivindicaciones 1 a 6, caracterizado porque incluye además medios de control de detención (PLC) para detener el accionamiento del actuador (4) cuando el dispositivo (44) de detección determina que alguna de las juntas (16, 17, 18, 19) 5 esféricas está suelta.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Sistema de interacción de robot, del 8 de Abril de 2020, de SMS group GmbH: Procedimiento para el funcionamiento de un sistema de interacción de robot, que está dispuesto en una instalación metalúrgica o de laminación y allí asociado […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Dispositivo automatizado con una estructura móvil, en concreto un robot, del 19 de Febrero de 2020, de COMAU S.P.A.: Dispositivo automatizado , en concreto, un robot, que comprende: - una estructura móvil (4 a 8; 103; 203; 301); - medios de accionamiento […]
Cobertura sensorizada para dispositivo industrial, del 19 de Febrero de 2020, de COMAU S.P.A.: Dispositivo automatizado , en concreto, un robot, que comprende: - una estructura móvil (4 a 8; 103; 203; 301); - medios de accionamiento (M; […]
Efector final magnético y dispositivo para guiar y posicionar el mismo, del 20 de Noviembre de 2019, de Ovesco Endoscopy AG: Dispositivo de guiado extracorpóreo para un objeto magnético intracorpóreo con un dispositivo de posicionamiento accionado a motor que tiene como máximo tres grados […]
Dispositivo de diagnóstico de fallos y método de diagnóstico de fallos, del 9 de Octubre de 2019, de NISSAN MOTOR CO., LTD.: Un dispositivo de diagnóstico de fallos aplicable a un dispositivo mecánico provisto de un motor como fuente para accionar un eje de […]