Sistema de interacción de robot.
Procedimiento para el funcionamiento de un sistema de interacción de robot,
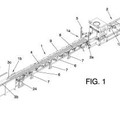
que está dispuesto en una instalación metalúrgica o de laminación y allí asociado a una estación de trabajo o zona de trabajo, para la ejecución de tareas con división de trabajo entre un robot (1) y un trabajador humano (2) en interacción temporal y espacial en la zona de trabajo y de movimiento del robot (1) en la estación de trabajo o la zona de trabajo en un dispositivo o una instalación metalúrgica o de laminación; en donde el sistema de interacción de robot comprende el robot (1) con su zona de trabajo y movimiento; un sistema de sensores de seguridad con las funciones de la detección de presencia humana y el monitoreo de la estación de trabajo para condiciones peligrosas; un controlador de robot y una interfaz humano-robot, que a través de un control manual o de un control por voz permite la ejecución de diferentes modos de funcionamiento y modos operativos como la respectiva forma de interacción entre la persona (2) y el robot (1);
en donde el controlador del robot presenta la interfaz humano-robot y los modos de funcionamiento y modos operativos que influyen en el modo de acción de la interfaz humano-robot; y los modos de funcionamiento y modos operativos correspondientes a los requisitos de la respectiva estación de trabajo están almacenados o bien directamente en el controlador del robot o en elementos de memoria que interactúan con el controlador del robot;
en donde un modo de funcionamiento o un modo operativo representa respectivamente la secuencia en la cual el trabajador humano (2) y el robot (1) realizan conjuntamente la respectiva tarea de trabajo en una interacción humano-robot; en donde el sistema de interacción de robot se adapta para ello a la estación de trabajo o la respectiva zona de trabajo y se determinan los modos de funcionamiento y los modos operativos requeridos para la tarea de trabajo específica en base a un análisis de los procesos de trabajo y las actividades individuales que se realizan la estación de trabajo o la respectiva zona de trabajo;
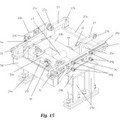
en donde el sistema de sensor de seguridad comprende un sensor o una combinación de sensores y detecta y monitorea la presencia del trabajador humano (2) en una zona de seguridad (4) y/o zona de entrada (5) asignada a la zona de trabajo del robot (1); en donde las señales determinadas y procesadas por los sensores y el sistema de sensor de seguridad se envían al controlador del robot y el sistema de sensor de seguridad o un sistema de sensores asociado al mismo reacciona cuando un trabajador humano (2) ingresa a la zona de seguridad (4) y/o a la zona de entrada (5) y acciona correspondientes acciones robóticas a través del controlador del robot, en función de un modo de funcionamiento respectivamente seleccionado y en función del modo operativo activo;
en donde los modos de funcionamiento y los modos operativos que adaptan el robot (1) a diferentes funcionalidadesy/o tareas operativas se activan y desactivan en el controlador del robot o se almacenan o representan en elementos de memoria que actúan conjuntamente con el controlador del robot de tal manera que el sistema de interacción de robot tiene acceso a ellos y puede funcionar en los diferentes modos de funcionamiento y modos operativos en cualquier cambio, de manera que el robot (1) se adapta a diferentes funcionalidades y/o tareas operativas mediante el modo de funcionamiento o modo operativo activado o desactivado;
en donde los modos de funcionamiento y los modos operativos del controlador del robot están adaptados a diferentes grados de automatización del robot (1) y/o a diferentes posiciones temporales y/o espaciales de los socios de interacción persona (2) y robot (1) en un espacio de trabajo, de tal manera que los mismos comprenden un funcionamiento automatizado del robot (1) y modos de funcionamiento y modos operativos en cuya aplicación tiene lugar una interacción técnica entre humanos (2) y robots (1), en la cual los humanos (2) y los robots (1) están juntos temporal y espacialmente en la zona de trabajo y de movimiento del robot (1), o en la cual la persona (2) y el robot (1) están temporalmente uno detrás del otro en la misma zona espacial de la zona de movimiento o zona de trabajo del robot (1), o en la cual el robot (1) y la persona (2) se encuentran en posiciones espacialmente separadas y, en particular, también actúan en diferentes momentos y, sin embargo, trabajan juntos en interacción para la realización de una tarea común.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/007765.
Solicitante: SMS group GmbH.
Inventor/es: SCHOCK, HANS-WILHELM, MOORS,MARK, PLOCIENNIK,CHRISTIAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B22D11/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B22 FUNDICION; METALURGIA DE POLVOS METALICOS. › B22D COLADA DE METALES; COLADA DE OTRAS MATERIAS POR LOS MISMOS PROCEDIMIENTOS O CON LOS MISMOS DISPOSITIVOS (trabajo de materias plásticas o sustancias en estado plástico B29C; tratamientos metalúrgicos, empleo de sustancias específicas que se añaden al metal C21, C22). › B22D 11/00 Colada continua de metales, es decir, obteniendo productos de longitud indefinida (estirado, extrusión del metal B21C). › Instalaciones para colada continua, p. ej. para tirar hacia arriba de la barra lingote.
- B22D33/00 B22D […] › Equipo para manipular los moldes.
- B22D41/00 B22D […] › Recipientes de mantenimiento de un baño en fusión, p. ej. cucharas, artesas de colada, fosos de colada o sistemas análogos (B22D 39/00, B22D 43/00 tiene prioridad).
- B22D41/02 B22D […] › B22D 41/00 Recipientes de mantenimiento de un baño en fusión, p. ej. cucharas, artesas de colada, fosos de colada o sistemas análogos (B22D 39/00, B22D 43/00 tiene prioridad). › Revestimientos.
- B22D41/14 B22D 41/00 […] › Cierres.
- B22D41/30 B22D 41/00 […] › Su fabricación o su reparación.
- B22D41/52 B22D 41/00 […] › Su fabricación o su reparación.
- B22D7/00 B22D […] › Colada de lingotes (equipos para el transporte del metal líquido B22D 35/00).
- B22D9/00 B22D […] › Máquinas o instalaciones para la colada de lingotes.
- B25J19/06 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F). › Dispositivos de seguridad.
PDF original: ES-2792457_T3.pdf
Patentes similares o relacionadas:
Dispositivo de colada, del 12 de Febrero de 2020, de Fill Gesellschaft m.b.H: Dispositivo de colada para colada a baja presión o a contrapresión, presentando el dispositivo de colada al menos una cámara inferior para al menos […]
Dispositivo de fundición, del 12 de Febrero de 2020, de Fill Gesellschaft m.b.H: Dispositivo de fundición para fundición a baja presión o a contrapresión, en donde el dispositivo de fundición tiene al menos una cámara inferior para al menos un […]
Método y sistema de indexación de moldes, del 16 de Abril de 2019, de DISA INDUSTRIES A/S: Un método de indexación de moldes que utiliza una máquina de moldeado sin cajas de moldeado para producir moldes y un transportador de moldes […]
Procedimiento para la fabricación de piezas de fundición de metal ferroso, del 23 de Octubre de 2018, de Huppert Engineering GmbH & Co. KG: Procedimiento para la fabricación de piezas de fundición de metal ferroso en el que - se introduce un molde perdido , con un espacio hueco para el […]
 Transportador de moldes, del 14 de Febrero de 2014, de LORAMENDI, S. COOP: Transportador de moldes con una zona de entrada de moldes y una zona de salida de moldes, que comprende un bastidor en el que está montada una pista […]
Transportador de moldes, del 14 de Febrero de 2014, de LORAMENDI, S. COOP: Transportador de moldes con una zona de entrada de moldes y una zona de salida de moldes, que comprende un bastidor en el que está montada una pista […]
 TRANSPORTADOR DE MOLDES, del 5 de Diciembre de 2013, de LORAMENDI, S. COOP: El transportador comprende un bastidor en el que está montada una parrilla de soporte , un mecanismo de mordazas longitudinalmente desplazable […]
TRANSPORTADOR DE MOLDES, del 5 de Diciembre de 2013, de LORAMENDI, S. COOP: El transportador comprende un bastidor en el que está montada una parrilla de soporte , un mecanismo de mordazas longitudinalmente desplazable […]
CADENA DE PRODUCCION Y PROCEDIMIENTO PARA LA REALIZACION, DE FORMA CONTINUA, DE PIEZAS MOLDEADAS A PARTIR DE UN METAL EN FUSION, EN PARTICULAR, DE UN METAL LIGERO EN FUSION., del 16 de Marzo de 2007, de HYDRO ALUMINIUM ALUCAST GMBH: Cadena de producción para el desplazamiento continuo de la producción realizada de piezas moldeadas (M) de una masa fundida metálica, en particular, de una […]
METODO Y APARATO PARA VERTER VARIOS MOLDES EN UNA PLANTA DE FUNDICION DE CADENA DE MOLDES EN UNA UNICA OPERACION DE VERTIDO., del 1 de Abril de 2007, de DISA INDUSTRIES A/S: Aparato de fabricación de moldes para una planta de fundición de cadena de moldes, incluyendo dicho apara- to una cámara de presión para producir partes de molde […]