Actuador con mecanismo de rigidez variable y par umbral.
Actuador con mecanismo de rigidez variable y par umbral, del tipo de los utilizados en articulaciones de revolución de brazos robóticos y que pueden modificar su rigidez.
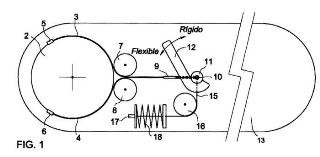
El actuador incorpora un motor (1) que se encarga de controlar la posición de equilibrio del eslabón de salida (13). El mecanismo contiene un resorte (18) y una palanca (12). La rigidez del mecanismo puede ser modificada variando la posición de esta palanca (12) mediante un motor (14). Dicha rigidez determina el valor del giro entre la posición de la polea (2) solidaria al eje de salida del motor (1) y la posición del eslabón (13). Dos tensores (5) y (6) permiten modificar la precarga de dos cables (3) y (4) respectivamente, de forma que el mecanismo no entra en funcionamiento hasta que no se ha sobrepasado un cierto valor de par sobre la articulación.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201200712.
Solicitante: UNIVERSIDAD DE ALMERIA.
Nacionalidad solicitante: España.
Inventor/es: JARDON HUETE,ALBERTO, LÓPEZ MARTÍNEZ,JAVIER, GIMÉNEZ FERNÁNDEZ,Antonio, TORRES MORENO,José Luis, SÁNCHEZ SALINA,Silvia, GARCÍA VALLEJO,Daniel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J19/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F). › Dispositivos de seguridad.
Fragmento de la descripción:
ACTUADOR CON MECANISMO DE RIGIDEZ VARIABLE Y PAR UMBRAL
CAMPO DE LA INVENCiÓN La presente invención se enmarca de manera general en el sector de maquinaria y equipo mecánico. Específicamente, la presente invención está orientada al campo de los robots de servicio y asistenciales. Concretamente aquellos que presenten articulaciones de revolución.
ANTECEDENTES DE LA INVENCiÓN Las aplicaciones de los robots manipuladores se están extendiendo a nuevos escenarios en los que pueden interaccionar con entornos desconocidos y realizar tareas cooperativas con los humanos. En este contexto, se han presentado nuevos retos en cuanto a cómo garantizar la seguridad del entorno, de las personas y del propio robot. Recientemente se ha mostrado gran interés en el desarrollo de los llamados Actuadores de Rigidez Variable como medio para reducir el daño en el caso de un choque accidental del robot sobre su entorno [1-18l. Esta reducción se consigue gracias al componente elástico de dicho actuador, donde su función es desacoplar mecánicamente la inercia del rotor del motor de la inercia del eslabón del brazo robot, de manera que la inercia del primero no contribuya en la fuerza generada en el impacto.
A diferencia de los actuadores rígidos de los robots industriales, con un actuador flexible es más difícil posicionar con exactitud el efecto final del brazo robot o seguir una determinada trayectoria con precisión. En este caso, .un actuador con rigidez variable puede actuar de manera rígida durante movimientos precisos a baja velocidad y aumentar su flexibilidad en desplazamientos a elevada velocidad donde la precisión en la trayectoria seguida es menos importante.
De entre los actuadores de rigidez variable que se utilizan en articulaciones de revolución de brazos robóticos, el mayor número de ellos presentan el inconveniente de que no permiten adoptar una configuración totalmente rígida [2-17]. Además, ninguno de los actuadores conocidos dispone de algún dispositivo que permita que el actuador se comporte de manera totalmente rígida mientras que no se supere un cierto valor de par sobre la articulación y, una vez superado dicho valor de par umbral entre en funcionamiento el mecanismo que aporta flexibilidad al actuador. La presente invención da solución a estos dos inconvenientes encontrados en los actuadores de rigidez variable conocidos.
[1] V. R. Ham, T. G. Sugar, B. Vanderborght, K. W. Hollander and D. Lefeber, "Compliant actuator designs: Review of actu ato rs with passive adjustable compliance/controllable stiffness for robotic applications, " IEEE Robotics and Automation Magazine, vol. 16, pp. 81-94, 2009.
[2] A. Bicchi and G. Tonietti, "Fast and "soft-arm" tactics, " IEEE Robotics and Automation Magazine, vol. 11, pp. 22-33, 2004.
[3] S. A. Migliore, E. A. Brown and S.P. DeWeerth, "Biologically inspired joint stiffness control, " IEEE International Conference on Robotics and Automation, pp. 4519-4524, 2005.
[4] M. Zinn, B. Roth, O. Khatib, and J.K. Dalisbur y , "A new actuation approach for human friendly robot design, " The International Journal of Robotics Research, vol. 23, pp. 379-398, 2004.
[5] A. Albu-Schaffer, O. Eiberger, M. Grebenstein, S. Haddadin, C. Ott, T. Wimbock, S. Wolf and G. Hirzinger, "Soft robotics, " IEEE Robotics and Automation Magazine, vol. 15, pp. 20-30, 2008.
[6] D. Hyun, H. S. Yang, J. Park and Y. Shim, "Variable stiffness mechanism for human-friendly robots, " Mechanism and Machine Theor y , vol. 45, pp. 880-897, 2010.
[7] A. Pratt, M.M. Williamson, "Series elastic actuators, " IEEE International Conference on Intelligent Robots and Systems, pp. 399-406. 1995.
[8] T. Morita, S. Sugano, "Design and development of a new robot joint using a mechanical impedance adjuster, "IEEE International Conference on Robotics and Automation, pp. 2469-2475. 1995.
[9] R. Schiavi, C. Crioli, S. Sen, and A. Bicchi, "VSA-II: A novel prototype of variable stiffness actuator for safe and performing robots interacting with humans", IEEE International Conference on Robotics and Automation, pp. 2171-2176. 2008.
[10] M. C. Catalano, R. Schiavi, and A. Bicchi, "Mechanism design for variable stiffness actuation based on enumeration and analysis of performance, " IEEE International Conference on Robotics and Automation, pp. 3285-3291. 2010.
[11] B. Vanderborght, N.C. Tsagarakis, C. Semini, R.V. Ham, and D.C. Caldwell, "MACCEPA 2.0: Adjustable compliant actuator with stiffening characteristic for energy efficient hopping, " IEEE International Conference on Robotics and Automation, pp. 544-549. 2009.
[12] A.C. Rodriguez, N.E.N. Rodriguez, and A.C.C. Rodriguez, "Design and validation of a novel actu ato r with adaptable compliance for application in human-like robotics, " Industrial Robot, vol. 36, pp. 84-90. 2009.
[13] H.5. Kim, J.J. Park, and J.B. Song, "Safe joint mechanism using double slider mechanism and spring for humanoid robot arm", IEEE-RAS International Conference on Humanoid Robots, pp. 73-78.2008.
[14] O. Hyun, H. S. Yang, J. Park, and Y. Shim, "Variable stiffness mechanism for human-friendly robots, " Mechanism and Machine Theor y , vol. 45, pp. 880-897, 2010.
[15] A. Jafari, N.C. Tsagarakis, B. Vanderborght, and O.C Caldwell, "A novel actuator with adjustable stiffness (AwAS) , " IEEE International Conference on Intelligent Robots and Systems, pp .4201-4206, 2010.
[16] B. S. Kim, and J. B. Song, "Hybrid dual actuator unit: A design of a variable stiffness actuator based on an adjustable moment arm mechanism, " IEEE International Conference on Robotics and Automation, pp. 1655-1660, 2010.
[17] L. Visser, R. Carloni, R. Unal, and S. Stramigioli, "Modeling anddesign of energy efficient variable stiffness actuators, " IEEElnternational Conference on Robotics and Automation, pp. 3273-3278, 2010.
[18] A. Jafari, N. Tsagarakis, and O. Caldwell, "AwAS-II: A New Actuator with Adjustable Stiffness based on the Novel Principie of Adaptable Pivot point and Variable Lever ratio, " IEEE International Conference on Robotics and Automation, pp. 4638-4643, 2011.
DESCRIPCIÓN DE LA INVENCiÓN La invención objeto de la presente memoria se refiere a un actuador con mecanismo de rigidez variable y par umbral, de entre aquellos actuadores destinados a su uso en articulaciones de revolución de brazos robóticos y que incorporan algún mecanismo que permite variar la rigidez de la articulación.
Caracteriza esta invención un especial mecanismo que permite variar la rigidez y adoptar también una configuración totalmente rígida, y que dispone de un dispositivo de par umbral ajustable, el cual evita que entre en funcionamiento el mecanismo hasta que no se haya sobrepasado un cierto valor de par sobre la articulación, siendo este valor de par ajustable a conveniencia.
El actuador objeto de la presente invención consta de un primer motor eléctrico que controla la posición de equilibrio del eslabón de salida de la articulación, donde el eje de salida de este motor actúa sobre una polea motriz en la que van fijados por medio de dos tensores, y arrollados en sentidos opuestos, sendos cables; los cuales, tras pasar por unas poleas guías se fijan a una barra. La tensión de cada uno de los cables aumentará según sea el sentido de giro de la polea motriz, quedando el otro cable sin tensión. La barra anterior está articulada en su otro extremo a un rodillo que puede rodar sobre una palanca. Un tercer cable fijado al eje del rodillo es redirigido por medio de una polea guía y fijado al extremo libre de un resorte o elemento elástico por medio de un tensor. Tanto las poleas guías, como la articulación de la palanca y el extremo fijo del resorte o elemento elástico, son solidarios al eslabón de salida de la articulación. El resorte o elemento elástico permite aportar flexibilidad mecánica entre la posición de salida de la polea motriz y la posición del eslabón de salida de la articulación. El valor de esta flexibilidad o rigidez mecánica viene dado por la posición angular de la palanca, la cual se puede modificar por medio de un segundo motor eléctrico.
Cuando la palanca se coloca en posición perpendicular a la barra sobre la que está articulado el rodillo, el actuador es totalmente rígido, no pudiendo haber desviación entre posición de la polea motriz y la posición del eslabón de salida. Si la palanca se coloca en posición paralela a la barra, el mecanismo adopta su configuración de mínima rigidez. En posiciones de palanca intermedias a las dos anteriores, el mecanismo adopta rigideces intermedias, pudiendo haber desviación entre la posición de la polea motriz y la posición del eslabón al comprimirse el resorte.
Otra novedad de la presente invención...
Reivindicaciones:
1. Actuador con mecanismo de rigidez variable y par umbral, del tipo de los utilizados en articulaciones de revolución de brazos robóticos y que pueden modificar su rigidez, esencialmente caracterizado por incorporar un motor 5 eléctrico (1) cuyo eje de salida es solidario a una polea (2) , sobre la que se arrollan en sentidos opuestos y se fijan sendos cables (3) y (4) por uno de sus extremos. Dichos cables (3) y (4) , tras pasar por unas poleas guía (7) y (8) respectivamente, salen alineados en la misma dirección y ambos se fijan por su otro extremo a un extremo de una barra (9) . Esta barra (9) está articulada en su otro extremo a un eje 10 (10) de un rodillo (11) que puede rodar sobre una palanca (12) . Esta palanca (12) y las poleas (7) y (8) están articuladas sobre el eslabón de salida (13) , donde este eslabón (13) puede girar sobre el eje de salida del motor (1) . Un extremo de un cable (15) va fijado al eje (10) del rodillo (11) , el otro extremo del cable (15) , tras pasar por una polea guía (16) , va fijado por medio de un tensor (17) al extremo libre de un resorte (18) . El otro extremo del resorte (18) va fijado al eslabón (13) . Un motor eléctrico (14) actúa sobre el eje de giro de la palanca (12) pudiendo modificar la posición angular de la misma, donde la posición angular de la palanca (12) determina la rigidez del mecanismo.
2. Actuador con mecanismo de rigidez variable y par umbral según la reivindicación 1, caracterizado por disponer de dos tensores (5) y (6) mediante los cuales se fijan los cables (3) y (4) respectivamente a la polea (2) , y que permiten modificar la precarga de los cables; de forma que esta precarga determina el valor de par mínimo necesario para que el mecanismo entre en funcionamiento.
+
FIG.2
FIG.3
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Sistema de interacción de robot, del 8 de Abril de 2020, de SMS group GmbH: Procedimiento para el funcionamiento de un sistema de interacción de robot, que está dispuesto en una instalación metalúrgica o de laminación y allí asociado […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Dispositivo automatizado con una estructura móvil, en concreto un robot, del 19 de Febrero de 2020, de COMAU S.P.A.: Dispositivo automatizado , en concreto, un robot, que comprende: - una estructura móvil (4 a 8; 103; 203; 301); - medios de accionamiento […]
Cobertura sensorizada para dispositivo industrial, del 19 de Febrero de 2020, de COMAU S.P.A.: Dispositivo automatizado , en concreto, un robot, que comprende: - una estructura móvil (4 a 8; 103; 203; 301); - medios de accionamiento (M; […]
Efector final magnético y dispositivo para guiar y posicionar el mismo, del 20 de Noviembre de 2019, de Ovesco Endoscopy AG: Dispositivo de guiado extracorpóreo para un objeto magnético intracorpóreo con un dispositivo de posicionamiento accionado a motor que tiene como máximo tres grados […]
Dispositivo de diagnóstico de fallos y método de diagnóstico de fallos, del 9 de Octubre de 2019, de NISSAN MOTOR CO., LTD.: Un dispositivo de diagnóstico de fallos aplicable a un dispositivo mecánico provisto de un motor como fuente para accionar un eje de […]