Dispositvo de protección contra colisiones.
Dispositivo de protección contra colisiones (1) para unir un soplete de soldadura (2) unido mediante un paquete demangueras (4) con un brazo de robot (3) de un robot de soldadura,
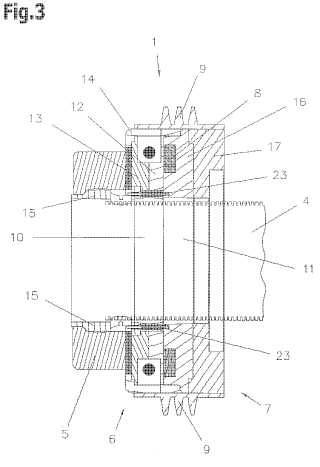
con dos elementos de acoplamiento (6, 7) que puedenunirse entre sí de modo liberable por medio de unos imanes (3), donde uno de los elementos de acoplamiento (6) estárealizado para ser unido al soplete de soldadura (2) o a un acoplamiento del soplete (5) que puede unirse con el sopletede soldadura (2), y el otro elemento de acoplamiento (7) está realizado para unirlo con el brazo del robot (3), presentandolos elementos de acoplamiento (6, 7) unos orificios (10, 11), caracterizado porque los orificios (10, 11) en los elementosde acoplamiento (6, 7) están realizados para el paso del paquete de mangueras (4), comprendiendo el elemento deacoplamiento (6) un acoplamiento del soplete (5) destinado a ser unido con el soplete de soldadura (2) o con elacoplamiento del soplete (5), elementos (15) para efectuar la unión con el paquete de mangueras (4), mientras que elpaquete de mangueras (4) está dispuesto con movilidad en el elemento de acoplamiento (7) que se puede unir con elbrazo del robot (3).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AT2010/000324.
Solicitante: FRONIUS INTERNATIONAL GMBH.
Nacionalidad solicitante: Austria.
Dirección: VORCHDORFER STRASSE 40 4363 PETTENBACH AUSTRIA.
Inventor/es: RICHTSFELD,MICHAEL, EHRENBRANDNER,STEFAN, TRAUNER,GERNOT.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J19/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
- B25J19/06 B25J […] › B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F). › Dispositivos de seguridad.
PDF original: ES-2399043_T3.pdf
Fragmento de la descripción:
Dispositivo de protección contra colisiones La invención se refiere a un dispositivo de protección contra colisiones para la unión entre un soplete de soldadura y un paquete de mangueras, con un brazo de un robot de soldadura, con dos elementos de acoplamiento que se pueden unir entre sí de modo liberable por medio de imanes, estando realizado uno de los elementos de acoplamiento para realizar la unión con el soplete de soldadura o con un acoplamiento de soplete que se pueda unir con el soplete de soldadura, y estando realizado el otro elemento de acoplamiento para establecer la unión con el brazo del robot, presentando ambos elementos de acoplamiento unos orificios.
Esta clase de dispositivos de protección contra colisiones o cajas de desconexión sirven para detectar una colisión de un soplete de soldadura con un obstáculo durante un proceso de soldadura y llevar a cabo la desconexión de la instalación del robot con el fin de evitar daños en el soplete de soldadura y en la instalación del robot y también de otras partes. Si durante el proceso de soldadura a lo largo de una trayectoria predeterminada el soplete de soldadura tropieza con un obstáculo, se desvía el soplete de soldadura respecto al brazo del robot con lo cual se accionan unos contactos eléctricos en el dispositivo de protección contra colisiones. El accionamiento de los contactos eléctricos da lugar a su vez a una desconexión lo más rápida posible del aparato de soldadura o de la instalación del robot, de modo que se puedan evitar otros daños y nuevos riesgos.
Un dispositivo de protección contra colisiones conforme al estado de la técnica con un acoplamiento magnético de los dos elementos de acoplamiento del dispositivo de protección contra colisiones se conoce por ejemplo por el documento US
5.954.446 A. El inconveniente de este diseño es que el paquete de mangueras del soplete de soldadura va conducido por el exterior del brazo del robot, lo cual por una parte aumenta el riesgo de que se produzca una colisión durante el proceso de soldadura, y por otra parte va en detrimento del comportamiento de respuesta del dispositivo de protección contra colisiones. Tampoco se indica ninguna solución sobre la forma en que el soplete queda soportado después de una colisión. Por lo tanto, en el caso de producirse una colisión, el soplete se caería, con lo cual éste y en todo caso la pieza quedarían dañados o destruidos.
Otro diseño de un dispositivo de protección contra colisiones se conoce por el documento AT 411 882 B, donde los dos componentes del acoplamiento de la caja de desconexión están unidos entre sí de forma articulada por medio de muelles. Este diseño es relativamente complejo, si bien el comportamiento de respuesta se mejora gracias a que el paquete de mangueras del soplete transcurre por el interior del dispositivo de protección contra colisiones.
En el documento EP 1 543 915 A1 se describe un dispositivo de protección contra colisiones de un cabezal de mecanizado láser cuyos elementos de acoplamiento se pueden unir entre sí de forma magnética y que presentan orificios para el paso del rayo láser.
El documento EP 1 970 171 A1 muestra una articulación de un robot en la que está previsto un orificio interior a través del cual pueden pasar cables o tuberías.
El objetivo de la presente invención consiste en crear uno de los dispositivos de protección contra colisiones antes citados, que se caracterice no solo por su construcción compacta sino también por un comportamiento de respuesta óptimo. El diseño del dispositivo de protección contra colisiones debe evitar en lo posible piezas o conductores que sobresalgan entre el soplete de soldadura y el brazo del robot, para mejorar también la accesibilidad a las piezas que se trata de soldar. Se deben evitar o reducir los inconvenientes de los diseños conocidos.
El objetivo conforme a la invención se resuelve mediante un dispositivo de protección contra colisiones antes citado en el que los orificios en los elementos de acoplamiento estén realizados para el paso del paquete de mangueras, y donde el elemento de acoplamiento que se puede unir con el soplete de soldadura o con el acoplamiento del soplete o el mismo acoplamiento del soplete presente elementos para realizar la unión con el paquete de mangueras, mientras que el paquete de mangueras está dispuesto con movilidad en el elemento de acoplamiento que puede unirse con el brazo del robot. A través de los orificios en los dos elementos de acoplamiento que se pueden unir entre sí de modo liberable se conduce el paquete de mangueras a través del dispositivo de protección contra colisiones, con lo cual se puede mejorar por una parte el comportamiento de respuesta del dispositivo de protección contra colisiones, pero al mismo tiempo se evitan piezas y conducciones que transcurran por el exterior del dispositivo de protección contra colisiones. El paquete de mangueras también se puede unir con el soplete de forma sencilla antes de realizar un proceso de soldadura, de tal modo que esto no tenga que efectuarse directamente en el robot. Para ello se ensarta al menos una parte del paquete de mangueras después de montarlo en el soplete por medio de la parte del dispositivo de protección contra colisiones fijado en el robot y el mismo robot, con lo cual la parte del dispositivo de protección contra colisiones fijada en el robot esencialmente no hay que desmontarla nunca. Por otra parte y debido a la longitud variable del paquete de mangueras, se define por lo menos en qué medida se pueden distanciar entre sí los elementos de acoplamiento. Mediante los elementos de acoplamiento se crea una descarga de tracción del contacto de enchufe usual entre el paquete de mangueras y el soplete de soldadura y se evita que en el caso de producirse una colisión del soplete de soldadura con un obstáculo se separe el paquete de mangueras del soplete de soldadura.
Convenientemente hay un fuelle dispuesto encima de los elementos de acoplamiento del dispositivo de protección contra colisiones, de modo que el dispositivo de protección contra colisiones queda protegido de la suciedad. Gracias a este fuelle que presenta una cierta elasticidad, esta protección tiene lugar tanto si el dispositivo de protección contra colisiones está cerrado como cuando está abierto. El fuelle también puede soportar una parte del peso del soplete de soldadura cuando el dispositivo de protección contra colisiones esté abierto. El fuelle está fabricado preferentemente de un material plástico y se coloca encima de los elementos de acoplamiento o se pega con éstos o se atornilla o se fija mediante elementos de presión tales como por ejemplo abrazaderas. Si para el fuelle se emplean los materiales adecuados y éste se fija correspondientemente, se puede soportar la totalidad del peso del soplete y del dispositivo de protección contra colisiones fijado en éste en el caso de producirse una colisión estando abierto el dispositivo de protección contra colisiones, con lo cual no se ejerce ninguna fuerza de tracción sobre el paquete de mangueras.
El elemento de acoplamiento del dispositivo de protección contra colisiones que se puede unir con el soplete de soldadura o con el acoplamiento del soplete está formado preferentemente por lo menos por una brida de asiento y con un alojamiento del soplete, y en todo caso está unido con un anillo de protección. La por lo menos una brida de asiento está realizada para establecer contacto con una correspondiente pieza magnetizada en el elemento de acoplamiento opuesto, la cual se puede unir con el brazo del robot. El alojamiento del soplete se realiza preferentemente de tal modo que se puedan unir con él los sopletes de soldadura usuales. En lugar de una unión directa del soplete de soldadura con el alojamiento del soplete puede emplearse también un acoplamiento del soplete como pieza intermedia entre el soplete de soldadura y el alojamiento del soplete. El eventual anillo de protección protege el conjunto especialmente contra la suciedad.
El alojamiento del soplete se debe poder unir con el soplete de soldadura o con el acoplamiento del soplete, preferentemente sin necesidad de emplear herramientas, por ejemplo por medio de un cierre de bayoneta o similar.
El anillo de protección del elemento de acoplamiento que se puede unir con el soplete de soldadura o con el acoplamiento del soplete está formado preferentemente de un material magnéticamente apantallable con lo cual se puede reducir la atracción magnética de partículas magnetizables y el correspondiente ensuciamiento del dispositivo de protección contra colisiones.
El elemento de acoplamiento del dispositivo de protección contra colisiones que puede unirse con el brazo del robot está formado preferentemente... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de protección contra colisiones (1) para unir un soplete de soldadura (2) unido mediante un paquete de mangueras (4) con un brazo de robot (3) de un robot de soldadura, con dos elementos de acoplamiento (6, 7) que pueden unirse entre sí de modo liberable por medio de unos imanes (3) , donde uno de los elementos de acoplamiento (6) está realizado para ser unido al soplete de soldadura (2) o a un acoplamiento del soplete (5) que puede unirse con el soplete de soldadura (2) , y el otro elemento de acoplamiento (7) está realizado para unirlo con el brazo del robot (3) , presentando los elementos de acoplamiento (6, 7) unos orificios (10, 11) , caracterizado porque los orificios (10, 11) en los elementos de acoplamiento (6, 7) están realizados para el paso del paquete de mangueras (4) , comprendiendo el elemento de acoplamiento (6) un acoplamiento del soplete (5) destinado a ser unido con el soplete de soldadura (2) o con el acoplamiento del soplete (5) , elementos (15) para efectuar la unión con el paquete de mangueras (4) , mientras que el paquete de mangueras (4) está dispuesto con movilidad en el elemento de acoplamiento (7) que se puede unir con el brazo del robot (3) .
2. Dispositivo de protección contra colisiones (1) según la reivindicación 1, caracterizado porque por encima de los elementos de acoplamiento (6, 7) está dispuesto un fuelle (9) .
3. Dispositivo de protección contra colisiones (1) según la reivindicación 1 ó 2, caracterizado porque el elemento de acoplamiento (6) que se puede unir con el soplete de soldadura (2) o con el acoplamiento del soplete (5) , está formado por lo menos por una brida de asiento (12) y está unida con un alojamiento del soplete (13) y en cualquier caso con un anillo de protección (14) .
4. Dispositivo de protección contra colisiones (1) según la reivindicación 3, caracterizado porque el alojamiento del soplete (13) se puede unir con el soplete de soldadura (2) o con el acoplamiento del soplete (5) sin necesidad de emplear herramientas, preferentemente por medio de un cierre de bayoneta o similar.
5. Dispositivo de protección contra colisiones (1) según la reivindicación 3 ó 4, caracterizado porque el anillo de protección (14) está formado por un material que forma pantalla magnética.
6. Dispositivo de protección contra colisiones (1) según una de las reivindicaciones 1 a 5, caracterizado porque el elemento de acoplamiento (7) que se puede unir con el brazo del robot (3) está formado por lo menos por una placa base (16) y está unida con una brida del robot (17) , estando la por lo menos una placa base (16) y la brida del robot (17) unidas entre sí preferentemente por medio de tornillos (18) .
7. Dispositivo de protección contra colisiones (1) según la reivindicación 6, caracterizado porque en la por lo menos una placa base (16) están previstos alojamientos (19) para los imanes (8) , para efectuar la unión liberable entre los elementos de acoplamiento (6, 7) .
8. Dispositivo de protección contra colisiones (1) según una de las reivindicaciones 1 a 7, caracterizado porque los elementos de acoplamiento (6, 7) están posicionados por medio de por lo menos un elemento de posicionamiento.
9. Dispositivo de protección contra colisiones (1) según la reivindicación 8, caracterizado porque el por lo menos un elemento de posicionamiento está formado por unos pasadores de posicionamiento (20) en uno de los elementos de acoplamiento (7) y por unos rebajes (21) destinados a alojar los pasadores de posicionamiento (20) en el otro elemento de acoplamiento (6) .
10. Dispositivo de protección contra colisiones (1) según una de las reivindicaciones 3 a 9, caracterizado porque los contactos eléctricos (23) están dispuestos de tal modo en el acoplamiento del soplete (5) que al fijar éste, los contactos (23) quedan posicionados alrededor del paquete de mangueras (4) en el orificio (10) de la brida de asiento (12) y los cables de conexión de los contactos (23) van conducidos en el paquete de mangueras (4) .
11. Dispositivo de protección contra colisiones (1) según una de las reivindicaciones 1 a 10, caracterizado porque los orificios (10, 11) en los elementos de acoplamiento (6, 7) presentan distintos diámetros, de modo que se forma un sector anular realizado para ser contactado por los contactos eléctricos (23) integrados en uno de los elementos de acoplamiento (6) .
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
Sistema de carga eléctrica para un robot, del 18 de Marzo de 2020, de Locus Robotics Corp: Un sistema de carga eléctrica, que comprende: un conjunto de cargador eléctrico, incluyendo: una base del cargador a acoplarse a una fuente de energía eléctrica; […]