Acoplamiento flexible de seguridad frente a impactos.
Acoplamiento flexible de seguridad frente a impactos, del tipo de los utilizados en eslabones de brazos robóticos y que incorporan algún mecanismo que permite variar el nivel de carga a partir del cual entra en funcionamiento la flexibilidad del acoplamiento.
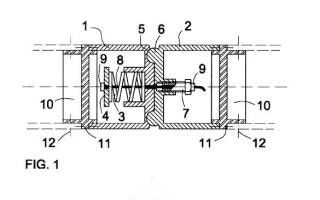
El acoplamiento incorpora una pieza (1) y una pieza (2) cilíndricas huevas enfrentadas por sus bases, las cuales disponen de una multitud de hendiduras (5) y protuberancias (6) que insertan perfectamente. Un resorte helicoidal (3) apoya en la cara interior de la base de la pieza (1) y en el otro extremo del resorte (3) se fija el extremo de un cable (8), el cual atraviesa las bases de las piezas (1) y (2). El otro extremo del cable (8) se fija a la cabeza de un tornillo (7) roscado a la base de la pieza (2) y que permite tensar el cable (8) y comprimir el resorte (3).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300030.
Solicitante: UNIVERSIDAD DE ALMERIA.
Nacionalidad solicitante: España.
Inventor/es: LÓPEZ MARTÍNEZ,JAVIER, GIMÉNEZ FERNÁNDEZ,Antonio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J19/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F). › Dispositivos de seguridad.
Fragmento de la descripción:
ACOPLAMIENTO FLEXIBLE DE SEGURIDAD FRENTE A IMPACTOS
CAMPO DE LA INVENCIïN
La presente invenciïn se enmarca de manera general en el sector de maquinaria y equipo mecïnico. Especïficamente, la presente invenciïn estï orientada al campo de los robots manipuladores. Concretamente aquellos robots de servicio y asistenciales que comparten el espacio de trabajo con el usuario.
ANTECEDENTES DE LA INVENCIïN
Los robots manipuladores tïpicamente han venido trabajando en aplicaciones donde su espacio de trabajo era conocido y bien estructurado, donde ademïs el acceso humano a este espacio de trabajo estaba restringido. De esta manera, la probabilidad de que se produjera un impacto accidental entre el manipulador y su entorno era muy reducida. Actualmente, los nuevos escenarios de trabajo en los que se estïn empleando los robots manipuladores incluyen entornos desconocidos, la realizaciïn de tareas cooperativas con los humanos y tareas asistenciales. En este contexto, se presenta un nuevo reto: garantizar la seguridad del robot, del entorno y de las personas en caso de un impacto accidental.
Recientemente se ha mostrado interïs en los actuadores de rigidez variable (ARV) 1 como una soluciïn para reducir el daïo en caso de impacto. La idea conceptual de estos actuadores es desacoplar elïsticamente la inercia del rotor del motor de la inercia del eslabïn, de manera que la inercia del primero no contribuya en la fuerza generada en el impacto. La rigidez de los ARV se puede modificar durante la tarea, de manera que en el caso de que no haya riesgo de impacto y para movimientos lentos y precisos de manipulador, el ARV se posiciona en su configuraciïn mïs rïgida. Y cuando el manipulador realiza movimientos rïpidos 1 V. R. Ham, T.g. Sugar, B. Vanderborght, K. W. Hollander and D. Lefeber, "Compliant actuador designs: Review of actuators with passive adjustable compliance/ controllable stiffness for robotic applications, " lEE Robotics and Automation Magazine, vol. 16 pp. 81-94, 2009.
con riesgo de colisiïn, el ARV se configura de manera que sea mïs flexible la uniïn eslabïn-rotor.
Sin embargo, estos actuadores presentan algunos inconvenientes: sïlo se han desarrollado para articulaciones de revoluciïn y, ademïs sïlo actïan segïn el grado de libertad de la articulaciïn a la que van acoplados. Si el movimiento del brazo se realiza segïn el giro de un actuador prïximo a la base, en la fuerza de impacto contribuirï la inercia de todos los eslabones en movimiento de la cadena cinemïtica del brazo.
La presente invenciïn se plantea como una alternativa a los ARV y pretende dar soluciïn a los inconvenientes mencionados anteriormente. En este caso, el mecanismo objeto de la presente invenciïn es una acoplamiento flexible que divide el eslabïn en dos partes. Existen otros acoplamientos flexibles y, entre estos, alguno concretamente orientado a eslabones de brazos robots2, sin embargo no es posible modificar el nivel de carga a partir del cual entra en funcionamiento la flexibilidad del acoplamiento.
DESCRIPCIïN DE LA INVENCiïN
La invenciïn objeto de la presente memoria se refiere a un acoplamiento flexible de seguridad frente a impactos, de entre aquellos acoplamientos destinados a su uso en eslabones de brazos robïticos y que incorporan algïn mecanismo que permite variar el nivel de carga a partir del cual entra en funcionamiento la flexibilidad del acoplamiento.
Caracteriza esta invenciïn un especial mecanismo que permite modificar el nivel de carga o fuerza sobre el eslabïn a partir del cual entra en funcionamiento el
) -J. Park, B-S Kim, J-B Song, H.S. Kim, "safe link mechanism based on nonlinear stiffness for collision safety", Mechanism and Machine Theor y , vol. 43, pp. 1332-1348, 2008.
acoplamiento y se produce un giro relativo entre las dos partes del eslabïn que une el acoplamiento. De esta forma, la principal novedad de la presente invenciïn es que el eslabïn se comporta como un eslabïn rïgido mientras no se sobrepase un cierto umbral de carga, siendo este umbral de carga ajustable segïn las necesidades de la operaciïn a realizar por el robot; una vez superado dicho nivel de carga entra en funcionamiento la flexibilidad del acoplamiento.
El acoplamiento objeto de la presente invenciïn consta de dos piezas principales enfrentadas entre sï por sus bases y alineadas segïn sus ejes de simetrïa, una de ellas presenta en su base una multitud de protuberancias de forma esfïrica que se hacen coincidir con el mismo nïmero de hendiduras presentes en la base de la otra pieza. Esta uniïn permite el giro relativo entre las dos piezas segïn cualquier eje contenido en el plano perpendicular al eje de simetrïa del acoplamiento y que pase por el centro geomïtrico de alguna de las protuberancias. Para aportar rigidez a la uniïn se dispone de un resorte apoyado en la cara interior de la base de una de las dos piezas anteriores y alineado segïn el eje de simetrïa. En el extremo libre del resorte se fija uno de los extremos de un cable, que tras pasar por el interior del resorte y atravesar las bases de las dos piezas principales, se fija su otro extremo a la cabeza de un tornillo. Este tornillo se encuentra roscado a la base de la segunda pieza principal y permite tensar el cable y comprimir el resorte segï n convenga.
En otra forma de realizaciïn, en lugar de utilizar un tornillo para tensar el cable, se utiliza un motor que hace girar un tornillo sinfïn sobre el que se desplaza un carro que tensa el cable. De esta forma se puede modificar de forma continua durante una operaciïn la tensiïn del cable.
El eslabïn en el cual estï incorporado el acoplamiento se mantiene rïgido mientras no se supera un cierto umbral de carga sobre el mismo. Una vez superado este nivel de carga el resorte se comprime y el acoplamiento se deforma. Modificando la tensiïn del cable se modifica el umbral de carga.
De esta forma, el eslabïn se puede mantener rïgido durante las condiciones de trabajo establecidas para el brazo robot, mientras que en el caso de que ocurra una sobrecarga o un impacto que supere el umbral de carga, el acoplamiento flexible actuarï, reduciïndose las fuerzas generas en el impacto.
Al estar el acoplamiento incorporado en el eslabïn del brazo robot, puede ser utilizado tanto en brazos robots con articulaciones de revoluciïn como prismïticas.
El presente invento estï orientado preferiblemente a su uso en eslabones de brazos de robots de servicio y asistenciales, pero igualmente tiene aplicaciïn en otros campos en los que una barra o eslabïn sea susceptible de incorporar un acoplamiento flexible.
BREVE DESCRIPCIïN DE LAS FIGURAS
La presente invenciïn se entenderï mejor con referencia a los siguientes dibujos que ilustran realizaciones preferidas de la invenciïn, proporcionadas a modo de ejemplo, y que no deben interpretarse como limitativas de la invenciïn de ninguna manera. La figura 1 muestra una vista en secciïn del modo de realizaciïn preferente del acoplamiento flexible de seguridad frente a impactos. La figura 2 muestra una vista en planta de una de las piezas principales del acoplamiento. La figura 3 muestra una vista en secciïn del acoplamiento cuando el mecanismo flexible ha entrado en funcionamiento.
La figura 4 muestra una vista en secciïn de otra forma de realizaciïn del acoplamiento en la que se utiliza un motor para modificar la tensiïn del cable.
MODO DE REALIZACiïN PREFERENTE
A la vista de lo anteriormente enunciado, la presente invenciïn se refiere a un acoplamiento flexible de seguridad frente a impactos, de entre aquellos utilizados en eslabones de brazos robïticos y que incorporan algïn mecanismo que permite variar el nivel de carga a partir del cual entra en funcionamiento la flexibilidad del acoplamiento flexible, esencialmente caracterizado por incorporar una pieza (1) con forma cilïndrica hueca y en cuya base presenta una multitud de hendiduras
(5) con forma esfïrica. Otra pieza (2) con forma cilïndrica hueca presenta en su base una multitud de protuberancias (6) que se insertan perfectamente en las hendiduras (5) de la pieza (1) , quedando las piezas (1) Y (2) enfrentadas por sus bases y alineadas segïn sus ejes de simetrïa. Un resorte helicoidal de compresiïn
(3) se apoya en la cara interior de la base de la pieza (1) , en el extremo libre del resorte (3) se ubica una tapa (4) y se fija a la misma el extremo de un cable (8) mediante una cabeza de presiïn (9) . Este tornillo (7) se encuentra roscado a la base de la pieza (2) y permite tensar el cable (8) y por tanto comprimir el resorte (3) .
Las piezas (1) Y (2) se cierran con sendas piezas (10) a modo de tapas, la fijaciïn entre dichas piezas...
Reivindicaciones:
1. Acoplamiento flexible de seguridad frente a impactos, del tipo de los utilizados en eslabones de brazos robïticos y que incorporan algïn mecanismo que permite variar el nivel de carga a partir del cual entra en funcionamiento la flexibilidad del acoplamiento, esencialmente caracterizado por incorporar una pieza (1) con forma cilïndrica hueca y en cuya base presenta un multitud de hendiduras (5) con forma esfïrica. Una pieza (2) con forma cilïndrica hueca que presenta en su base una multitud de protuberancias (6) las cuales se insertan perfectamente en las hendiduras (5) de la pieza (1) , quedando las piezas (1) Y (2) enfrentadas por sus bases y alineadas segïn sus ejes de simetrïa. Un resorte helicoidal de comprensiïn
(3) se apoya en la cara interior de la base de la pieza (1) , en el extremo libre del resorte (3) se ubica una tapa (4) y se fija a la misma el extremo de un cable (8) mediante una cabeza de presiïn (9) que muerde firmemente el cable. El cable (8) pasa por el interior del resorte (3) y atraviesa las bases de las piezas (1) Y (2) . El otro extremo del cable (8) se fija a la cabeza de un tronillo (7) mediante otra cabeza de presiïn (9) . Este tornillo (7) se encuentra roscado a la base de la pieza
(2) y permite tensar el cable (8) y asï comprimir el resorte (3) . Dos piezas (10) a modo de tapas cierran las piezas (1) Y (2) respectivamente. La fijaciïn entre dichas piezas se realiza con una multitud de tornillos (11) . Las dos partes del eslabïn que une el acoplamiento se fijan mediante una multitud de tornillos (12) a sendas piezas (10) respectivamente.
2. Acoplamiento flexible de seguridad frente a impactos segïn la reivindicaciïn 1, caracterizado por incorporar, en lugar de un tornillo (7) y una pieza (10) , un motor
(14) fijado a una pieza (13) a modo de tapa. El motor (14) hace girar un tornillo sinfïn (15) sobre el que se desplaza un carro (16) que tensa el cable (8) .
FIG.1
FIG.2
FIG.3
-~--~..
FIG.4
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Sistema de interacción de robot, del 8 de Abril de 2020, de SMS group GmbH: Procedimiento para el funcionamiento de un sistema de interacción de robot, que está dispuesto en una instalación metalúrgica o de laminación y allí asociado […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Dispositivo automatizado con una estructura móvil, en concreto un robot, del 19 de Febrero de 2020, de COMAU S.P.A.: Dispositivo automatizado , en concreto, un robot, que comprende: - una estructura móvil (4 a 8; 103; 203; 301); - medios de accionamiento […]
Cobertura sensorizada para dispositivo industrial, del 19 de Febrero de 2020, de COMAU S.P.A.: Dispositivo automatizado , en concreto, un robot, que comprende: - una estructura móvil (4 a 8; 103; 203; 301); - medios de accionamiento (M; […]
Efector final magnético y dispositivo para guiar y posicionar el mismo, del 20 de Noviembre de 2019, de Ovesco Endoscopy AG: Dispositivo de guiado extracorpóreo para un objeto magnético intracorpóreo con un dispositivo de posicionamiento accionado a motor que tiene como máximo tres grados […]
Dispositivo de diagnóstico de fallos y método de diagnóstico de fallos, del 9 de Octubre de 2019, de NISSAN MOTOR CO., LTD.: Un dispositivo de diagnóstico de fallos aplicable a un dispositivo mecánico provisto de un motor como fuente para accionar un eje de […]