CIP-2021 : B25J 9/10 : caracterizado por los medios para regular la posición de los elementos del manipulador.
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/10[1] › caracterizado por los medios para regular la posición de los elementos del manipulador.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/10 · caracterizado por los medios para regular la posición de los elementos del manipulador.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL.
(02/07/2020). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: SALAMANCA POBLETE,Hugo, BAEZA RAMIREZ,Luis.
Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica de revestimientos de molinos para la molienda de minerales en procesos de conminución, cuya configuración y operación permita mejorar la tarea de manipulación al poseer un mayor grado de libertad y/o flexibilidad en sus movimientos, proporcionando al procedimiento un mayor grado de certeza y eficacia, por lo tanto optimizando el tiempo de detención del molino por mantenimiento, así como evitar los riesgos a los que se pueda ver sometido el personal de mantenimiento, el sistema comprende al menos una estructura de soporte, al menos un sistema de alimentación y desplazamiento de revestimientos, al menos un sistema manipulador robótico de los revestimientos, al menos una herramienta de manipulación de revestimientos, al menos un sistema de visión artificial y al menos un sistema de control.
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario.
(13/05/2020) Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado al primer eslabón ; un conjunto de soporte para brazo acoplado al segundo eslabón y configurado para pivotar alrededor de un eje horizontal, en donde: el conjunto de soporte para brazo incluye un resorte configurado para generar un par de asistencia que contrarresta la gravedad; y el conjunto de soporte para brazo está configurado para proporcionar el par de asistencia a un brazo de un usuario para soportar el brazo del usuario; y un puño acoplado al conjunto de soporte para brazo y configurado para dar soporte para el brazo del usuario,
caracterizado por que
el segundo eslabón está configurado para pivotar en…
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica.
(06/05/2020) Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado de detección con respecto a una estructura de sujeción para contener uno o más recipientes de muestras , que comprende:
(a) un sistema automatizado de detección configurado para procesar recipientes de muestras, teniendo dicho sistema de detección una carcasa que alberga una cámara interior ;
(b) una estructura de sujeción dentro de dicha cámara interior, teniendo dicha estructura de sujeción uno o más pozos de contención configurado para contener recipientes de muestras individuales, en la que dicha estructura de sujeción comprende además una o más referencias ;
(c) un mecanismo automatizado…
Robot de instalación de revestimiento, en particular robot de manipulación.
(04/09/2019) Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil durante una operación de pintado, con una cinemática de robot para el movimiento de un efector en el espacio, que presenta:
a) un primer elemento de robot dispuesto de forma proximal,
b) un segundo elemento de robot que está dispuesto cinemáticamente detrás del primer elemento de robot y es móvil con respecto al primer elemento de robot ,
c) un primer brazo de robot con una cinemática en paralelo, estando dispuesto el primer brazo de robot cinemáticamente detrás del segundo elemento de robot y siendo móvil con respecto al segundo elemento de robot , y
d) un tercer elemento de robot ,…
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot.
(22/05/2019) Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo un eje central (A), comprendiendo además el tubo hinchable medios de recuperación de tensión de tracción longitudinal aplicada a la envoltura por la presión interna en esta última, caracterizado por que los medios de recuperación de tensión comprenden pares de un primer y de un segundo medio de enlace inextensible que se extiende en el interior de la envoltura , estando repartidos dichos pares en N semiplanos longitudinales (P11, P12) de la envoltura , extendiéndose cada uno entre el eje central (A) de la envoltura y una línea generatriz respectiva de…
Dispositivo para el posicionamiento tridimensional de un componente de acoplamiento y sistema de actuadores.
(27/03/2019) Dispositivo para el posicionamiento tridimensional de un componente (KK) de acoplamiento que es parte de una estructura (KS) de acoplamiento accionada por actuadores, con al menos
- un primer elemento (K1) de acoplamiento, que dispone de una primera extension (L1) longitudinal, el cual esta montado de manera desplazable bidireccionalmente a lo largo de su primera extension (L1) longitudinal mediante un primer actuador (A1),
- un segundo elemento (K2) de acoplamiento, que dispone de una segunda extension (L2) longitudinal, el cual esta montado de manera desplazable bidireccionalmente a lo largo de su segunda extension (L2) longitudinal mediante un segundo actuador (A2), la cual esta orientada ortogonalmente con respecto a la primera extension (L1) longitudinal, y
- un…
Seguridad de un robot de carácter humanoide.
(03/12/2018). Solicitante/s: Softbank Robotics Europe. Inventor/es: CLERC,VINCENT.
Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une los dos elementos , permitiendo la articulación un abatimiento en un intervalo dado (a) en funcionamiento operativo, estando destinado uno primero de los dos elementos a ponerse en contacto con un tope que pertenece a uno segundo de los dos elementos en el extremo del intervalo (a), caracterizado porque comprende además al menos un interruptor configurado para accionar un contacto eléctrico cuando una fuerza ejercida por el primer elemento contra el tope sobrepasa una fuerza dada.
PDF original: ES-2692417_T3.pdf
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario.
(23/11/2018) Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado al primer eslabón ; un conjunto de soporte para brazo acoplado al segundo eslabón y configurado para pivotar alrededor de un eje horizontal, en donde: el conjunto de soporte para brazo incluye un resorte configurado para generar un par de asistencia que contrarresta la gravedad; el conjunto de soporte para brazo está configurado para proporcionar el par de asistencia a un brazo de un usuario para soportar el brazo del usuario; un puño acoplado al conjunto de soporte para brazo y configurado para acoplarse al brazo del usuario, caracterizado por que
el segundo eslabón está configurado para pivotar en un plano transversal alrededor de…
Estación de depósito de un cordón de materia sobre una cubierta y/o un fondo.
(24/10/2018) Estación de depósito de un cordón de materia sobre una cubierta y/o un fondo destinado a un recipiente metálico, comprendiendo dicha estación:
- un dispositivo de transferencia adaptado para desplazar las cubiertas y/o fondos según una primera dirección (Y) y
- un robot paralelo que comprende:
- un soporte ,
- dos brazos articulados montados rotativos sobre el soporte,
- dos accionadores , estando cada uno de los accionadores adaptado para arrastrar en rotación uno de los brazos articulados,
- una barquilla montada rotativa sobre los brazos articulados,
- al menos una boquilla de inyección solidaria con la barquilla, extendiéndose la al menos una boquilla según una dirección vertical…
DISPOSITIVO DE APUNTAMIENTO.
(06/08/2018). Solicitante/s: UNIVERSIDAD DE CASTILLA-LA MANCHA. Inventor/es: CASTILLO GARCIA,FERNANDO JOSE, GONZALEZ RODRIGUEZ,ANTONIO, GONZALEZ RODRIGUEZ,ANGEL GASPAR, SAN-MILLÁN RODRÍGUEZ,Andrés.
Dispositivo de apuntamiento formado por al menos un tren de engranajes epicicloidales, que tiene un primer eje de entrada conectado a un primer engranaje cónico , y un segundo eje de entrada coaxial con el primero y conectado a un segundo engranaje cónico . Además tiene una caja móvil entre los ejes de entrada , que tiene en su interior el primer y segundo engranajes cónicos y adicionalmente un tercer y cuarto engranajes cónicos que giran libremente alrededor de un eje móvil perpendicular a los ejes de entrada , engranando el tercer y cuarto engranajes cónicos con el primer y segundo engranajes cónicos . El dispositivo tiene un elemento de salida fijado rígidamente a la caja móvil . Los ejes de entrada están configurados para girar en un único sentido continuamente durante el apuntamiento.
PDF original: ES-2677694_A1.pdf
Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado y sistema.
(21/02/2018) Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado para un manipulador, en particular en una calle de fabricación para la fabricación de carrocerías de vehículo, en donde el dispositivo presenta una base de sujeción y un elemento base colocado de manera que puede moverse de forma giratoria alrededor de un eje de giro con respecto a la base de sujeción , en donde al elemento base están fijados al menos un primer y un segundo elementos de facilitación (6', 6"), en donde el primer y el segundo elementos de facilitación (6', 6") están previstos en cada caso para el alojamiento de los aparatos de sujeción y/o de mecanizado , en donde el primer elemento de facilitación (6') puede girar por medio de un primer dispositivo de giro (4') al menos…
Sistema y método para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica.
(03/01/2018) Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado de detección con respecto a una estructura de sujeción para contener uno o más recipientes de muestras , que comprende:
(a) un sistema automatizado de detección para procesar recipientes de muestras, teniendo dicho sistema automatizado de detección una carcasa que alberga una cámara interior ;
(b) una estructura de sujeción dentro de dicha cámara interior, teniendo dicha estructura de sujeción uno o más pozos de contención para contener recipientes de muestras individuales, en la que dicha estructura de sujeción…
Dispositivo de sonda articulado extensible.
(06/12/2017) Un dispositivo de sonda articulado que comprende:
un primer mecanismo que comprende:
un primer miembro de articulación posicionado en una zona proximal del primer mecanismo , una pluralidad de miembros de articulación intermedios , en donde uno primero de los miembros de articulación intermedios está acoplado de manera movible al primer miembro de articulación , un segundo miembro de articulación posicionado en una zona distal del primer mecanismo el cual está acoplado de manera movible a uno segundo de los miembros de articulación intermedios , y
un orificio pasante posicionado excéntricamente a través del cual está dispuesto un cable de actuación, en el que un primer extremo del cable de actuación está configurado para ser terminado sobre un componente de actuación…
Detección de proximidad en robots móviles.
(01/11/2017) Un robot autónomo que comprende:
un cuerpo del robot que define una dirección motriz de avance (F);
un sistema motriz que soporta el cuerpo del robot y configurado para maniobrar el robot sobre una superficie (10, 10a, 10b);
al menos un detector de proximidad (520, 520a, 520b, 520c, 520d, 520e, 520f) que comprende:
un primer componente que tiene un primer campo de visión ;
un segundo componente (522a, 524a) que tiene un segundo campo de visión (523a, 525a), intersectando el primer campo de visión el segundo campo de visión (523a, 525a) para formar un primer volumen de intersección (V1);
…
ROBOT INDUSTRIAL MULTI-EJES.
(07/08/2017). Solicitante/s: ORTEGA MUÑOZ, David. Inventor/es: ORTEGA MUÑOZ,DAVID.
Robot industrial multi-ejes que comprende una cadena de elementos unidos entre sí por medio de unas articulaciones móviles accionadas y movidas por al menos un dispositivo de control, la cadena de elementos se extiende desde una estructura base hasta una herramienta requerida en una estación de trabajo, donde, la cadena de elementos comprende un segmento de brazo posicionador que incluye a la estructura base, y al menos un segmento de brazo manipulador que incluye en su extremo libre a la herramienta, el segmento de brazo posicionador aproxima al segmento de brazo manipulador a la estación de trabajo.
PDF original: ES-2629037_A1.pdf
PDF original: ES-2629037_B1.pdf
Banco de pruebas para vehículos de motor.
(01/02/2017). Solicitante/s: Dürr Assembly Products GmbH. Inventor/es: KOLB,THOMAS, AREND,SACHA.
Banco de pruebas para vehículos de motor, siendo en el que un dispositivo de aspiración o un elemento de maniobra son conducidos por al menos dos cables que están articulados en dos puntos de articulación distanciados entre sí por encima del banco de pruebas para vehículos de motor, estando unido cada uno de los cables a un accionamiento.
PDF original: ES-2621900_T3.pdf
Transmisión de robot con un dispositivo de compensación de presión.
(28/12/2016) Robot , en particular, un robot de pintado o robot de manipulación de una instalación de pintado para pintar componentes de carrocería de vehículos automóviles, con
a) varias transmisiones de robot , cada uno de ellos con
a1) una carcasa de transmisión , que, durante el funcionamiento, está llena por lo menos parcialmente de un lubricante con una presión de lubricante que depende del funcionamiento, con el fin de lubricar la transmisión de robot 10 , y
a2) un máximo de presión para la presión de lubricante en función del tipo de construcción, dejando la carcasa de transmisión de ser estanca cuando la presión de lubricante en la carcasa de transmisión excede el máximo de presión, y
b) un dispositivo de compensación de presión , que está conectado…
Dispositivo del tipo de robot de brazo articulado.
(21/09/2016) Dispositivo del tipo de un robot de brazo articulado para la manipulación de una carga útil, con un brazo de robot (R), que
- está fijado en una base giratoria alrededor de un primer eje (A1),
- que posee al menos dos miembros de brazos dispuestos en serie unos detrás de otros a modo una cadena cinemática, cuyo primer miembro de brazo está alojado de forma pivotable en la base alrededor de un segundo eje (A2) orientado ortogonal al primer eje y cuyo segundo miembro de brazo está colocado de forma pivotable en el primer miembro de brazo alrededor de un tercer eje (A3) orientado paralelo al segundo brazo (A2), así como
- una mano central (AZ) colocada en el lado extremo en la cadena cinemática, en el que está previsto un primer actuador lineal , que articula el primer miembro de brazo alrededor del segundo…
(04/05/2016) Unidad de engranaje , con un árbol de accionamiento y con un accionamiento , estando colocado el accionamiento de forma coaxial respecto al árbol de accionamiento , y estando unido el árbol de accionamiento con el accionamiento mediante un sistema de transmisión por cable, caracterizada por que el sistema de transmisión por cable está compuesto por al menos una primera instalación de tracción por cable y al menos una segunda instalación de tracción por cable, estando compuestas respectivamente la primera y la segunda instalación de tracción por cable por un cable de accionamiento y un enrollador de cable, estando colocados en el accionamiento…
ARTICULACIÓN CON RIGIDEZ CONTROLABLE Y DISPOSITIVO DE MEDICIÓN DE FUERZA.
(14/01/2015) El objeto de la invención es una articulación con rigidez controlable y medición de fuerza, comprende un primer dispositivo , que comprende un marco con una cara curva, conectado con un primer elemento motor , realizando este primer dispositivo la regulación de la posición de la articulación , y un segundo dispositivo que regula la rigidez de la articulación , que comprende un elemento de empuje cuyo desplazamiento (D) determina una pre-compresión de un elemento resistivo determinando de este modo la rigidez de la articulación , y el primer elemento motor proporciona un giro al marco tal que una rueda del segundo dispositivo recorre la cara curva del marco generando una compresión (C) del elemento resistivo a través de una barra de transmisión asociada a dicha rueda y al elemento…
Dispositivo de transporte.
(17/12/2014) Dispositivo de transporte para piezas de trabajo , en particular piezas de chapa, entre depósitos o dispositivos de procesamiento contiguos, en particular prensas, en que el dispositivo de transporte incluye un robot multiaxial con una herramienta asidora , en que el dispositivo de transporte incluye un dispositivo de transferencia controlable, guiado por el robot , con un dispositivo de avance y con un dispositivo de basculación para la herramienta asidora , en que el dispositivo de transferencia incluye un portaherramientas , que puede ser movido por traslación y rotación por el dispositivo de avance y el dispositivo de basculación con relación a la…
Máquina regleadora para nivelar bases de suelos.
(26/11/2014) Máquina regleadora para nivelar bases de suelos, que comprende un bastidor o cuerpo principal (BB), unos medios de soporte y manejo (AA) del bastidor (BB) en al menos dos direcciones, que están interconectados a dicho bastidor o cuerpo (BB), y unos medios de soporte y manejo (CC) de al menos un dispositivo de fresado (DD), que están fijados también a dicho bastidor o cuerpo (BB), teniendo dicho dispositivo de fresado (DD), como parte extrema, al menos una herramienta rodante (EE) adecuada para nivelar y alisar una base de suelo a fin de obtener una superficie acabada sobre la cual sea posible colocar al menos un tipo de superficie de cubierta, en donde dichos…
Robot multifunción para desplazarse sobre una pared utilizando un sistema de posicionamiento global de interior.
(12/11/2014) Un robot que escala paredes que utiliza un sistema de posicionamiento global de interior (IGPS) proporcionado en un espacio , que comprende:
un receptor de navegación configurado para recibir haces de abanico rotatorios emitidos desde uno o más transmisores de navegación del sistema de posicionamiento global de interior , y reconocer los haces de abanico rotatorios como señales de IGPS;
una carcasa de robot sobre la que está montado el receptor de navegación ; un mecanismo de accionamiento ; un controlador móvil instalado en la carcasa de robot , en que el controlador móvil reconoce y determina su propia posición mediante el uso de las señales de IGPS; y que incluye:
una unidad central de proceso para operar y controlar todos los elementos…
Robot que incluye conjuntos de tornillos de avance extensibles para colocar un efector terminal.
(29/10/2014) Un robot que comprende:
un conjunto de accionador;
unos conjuntos de tornillos de avance extensibles paralelos primero y segundo en voladizo desde el conjunto de accionador; y
un efector terminal acoplado a y soportado por los extremos de los conjuntos de tornillos de avance;
haciendo el conjunto de accionador que cada conjunto extensible se despliegue y se retraiga de manera independiente, y donde cada conjunto extensible incluye unos tornillos de avance primero , segundo y tercero , donde un extremo del primer tornillo de avance está acoplado al efector terminal, teniendo el primer tornillo de avance unas roscas externas que se acoplan con un orificio roscado internamente del segundo tornillo de avance, teniendo el segundo tornillo de avance unas roscas externas que se acoplan con un orificio roscado…
Dispositivo de asistencia para portar al menos una herramienta de lijado y/o de pulido.
(06/08/2014) Dispositivo de asistencia para el manejo de al menos una herramienta de lijado y/o de pulido que comprende:
- un bastidor de base ;
- al menos un subconjunto de soporte montado sobre dicho bastidor de tal forma que sea móvil en tres direcciones ortogonales entre sí, estando dicho subconjunto de soporte destinado a soportar una herramienta de lijado , comprendiendo dicho subconjunto de soporte:
- un brazo diseñado para portar dicha herramienta;
- unos medios de accionamiento diseñados para desplazar el brazo sobre dicho bastidor en las tres direcciones;
- unos medios de control de la presión que la herramienta de lijado aplica sobre una superficie de lijado, controlando dichos medios de control los medios de accionamiento, de tal forma que la herramienta ejerza una presión predeterminada…
Manipulador quirúrgico para un sistema telerrobótico.
(23/10/2013) Un aparato para su uso en un sistema quirúrgico robótico que comprende:
un instrumento quirúrgico y un conjunto manipulador que tiene un porta-instrumento que está montado deforma liberable en una base y un conjunto de accionamiento para manipular el instrumento quirúrgico ,que está acoplado de forma liberable al porta-instrumento , en al menos dos grados de libertad;
en donde el instrumento quirúrgico comprende:
un eje que tiene un extremo distal y un extremo proximal ; un efector extremo accionable enel extremo distal de dicho eje ; al menos un elemento alargado conectado al efector extremo para causar el accionamiento de dicho efector extremo…
Procedimiento para la compensación de fricción en un dispositivo de retroalimentación de fuerza equipado de una transmisión de cable.
(17/04/2013) Procedimiento de compensación de fricción en un dispositivo de retroalimentación de fuerza comprendiendo unórgano de mando manipulado por un usuario y acoplado a un cable tirante accionado por un motorreductor , el cual comprende las etapas de:
- detectar una variación de flecha del cable ocasionada por una manipulación del órgano de mando;
- en respuesta a esta detección, accionar el motorreductor para que desarrolle un esfuerzo (Fa) compensando almenos parcialmente los rozamientos internos (Rsa) del motorreductor oponiéndose a un movimiento del órgano demando manipulado por el usuario.
Equipo de elevación para la manipulación manual de cargas.
(22/03/2013) Equipo de elevación para la manipulación manual de una carga , que incluye al menos un brazomanipulador alojado de forma giratoria en una articulación giratoria asociada , con un eje de girovertical , y que presenta medios de sujeción para la carga , estando previsto un accionamientode apoyo que actúa sobre la articulación giratoria para girar el brazo manipulador yestando dispuesto, en la zona de los medios de sujeción para la carga , un dispositivo de control para un accionamiento de apoyo accionable por el usuario,
caracterizado porque el accionamiento de apoyo incluye un limitador de momentos en forma de unacoplamiento deslizante, y porque el acoplamiento deslizante está dimensionado de modo que su momentode transmisión puede ser superado…
BRAZO MANIPULADOR DE CARGAS CON PARES DE ACTUACION REDUCIDOS.
(14/09/2012) Brazo manipulador de cargas con pares de actuación reducidos.
La patente describe un brazo manipulador (1, 1', 1'') de cargas con bajos pares de actuación, que comprende varios eslabones (6, 6', 6'', 10, 10', 10'') intermedios unidos entre sí por articulaciones (5, 5', 5'', 9, 9', 9''), donde el último eslabón (14, 14', 14'') está unido a una articulación activa (13, 13', 13''), comprendiendo un mecanismo de cuatro barras (11a, 11a', 11a'', 11b, 11b', 11b'', 12, 12', 12'', 15, 15', 15'') cuya barra de extremo (15, 15', 15''), que se proyecta hacia abajo en dirección vertical, tiene un punto de enganche al que se acopla la carga.
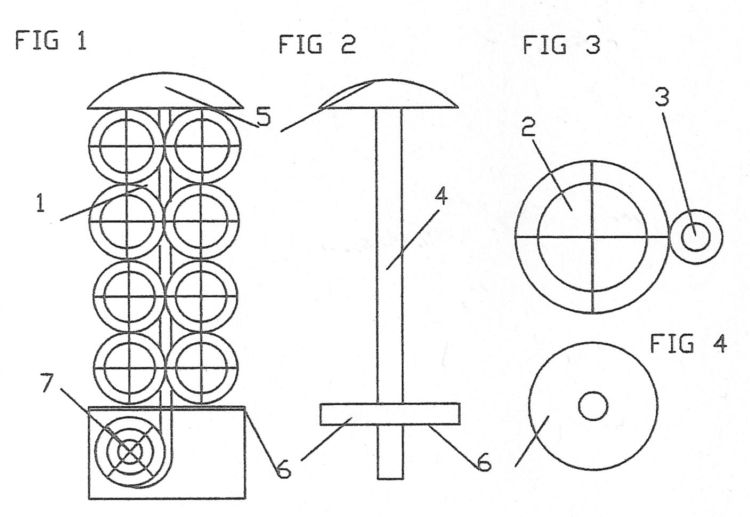
COLUMNA DE ESTRUCTURA VARIABLE Y DE SUSTENTACION NEUMATICA O HIDRAULICA.
(16/05/2008). Ver ilustración. Solicitante/s: MANZANEDA SANCHEZ,JULIAN. Inventor/es: MANZANEDA SANCHEZ,JULIAN.
La columna objeto de esta invención está ideada para el soporte y manejo de materiales, útiles y herramientas.#La columna está construida por un conjunto de esferas que permiten el llenado neumático o hidráulico, con su correspondiente control de volumen y presión. Las esferas van formando planos en número de tres, cuatro o más unidades y van dotadas de unas arandelas laterales.#Los planos de esferas, van encajados entre dos planos rígidos. Estos planos van unidos por un eje tensor flexible. Este eje va fijado a uno de los planos rígidos, pasa por dentro de las arandelas fijadas a las esferas, pasa por el centro del otro plano rígido y es tensado por un cabestrante. Mediante el llenado de las esferas, tensado del eje y variando la presión de algunas esferas, se modifican la rigidez, longitud y forma de la columna. Es aplicable en robótica.
POSICIONADOR PLANO DE DOS GRADOS DE LIBERTAD CON ACTUADORES ESTATICOS Y CONFINADOS.
(16/03/2008) Posicionador plano de dos grados de libertad con actuadores estáticos y confinados.#El dispositivo objeto de la presente invención consiste en un sistema posicionador paralelo de dos grados de libertad con los actuadores estáticos y confinados que permite posicionamientos de un punto (conocido como punto efectivo) sobre un plano. El sistema dispone de dos actuadores que trabajan simultánea y conjuntamente (en paralelo) en el desplazamiento de dos articulaciones. Esta disposición permite utilizar actuadores de menor potencia que en los sistemas tradicionales y está indicado para trabajar con objetos explosivos o inflamables de manera que ante eventuales accidentes (explosiones)…
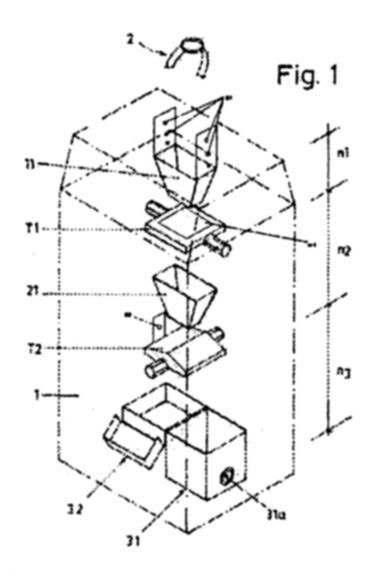
ADICION A LA PATENTE P200402584 LECTOR-RECUPERADOR DE MUÑEQUERAS, PARA CONTROL DE ACCESO.
(16/11/2007). Ver ilustración. Solicitante/s: OJMAR, S.A.. Inventor/es: ELORZA CRUZ,AITOR.
Adición a la Patente P 200402584 lector-recuperador de muñequeras, para control de accesos, que presenta configuración independiente del propio acceso y consta de un módulo con, al menos, tres niveles (n1), (n2), (n3), y en ellos, al menos, una lectura y varios sensores de posición.#En el tercer nivel (n3), se dispone un almacén , inaccesible al usuario, al que llega la muñequera correcta si ya no es reutilizable; y una bandeja de recogida , accesible al usuario, a la que llega la muñequera en caso contrario.#Toda la información generada son señales eléctricas, controladas por un PC o por un controlador.#De aplicación en el control de acceso a recintos.
{kind=link}
{kind=link}