ARTICULACIÓN CON RIGIDEZ CONTROLABLE Y DISPOSITIVO DE MEDICIÓN DE FUERZA.
El objeto de la invención es una articulación (1) con rigidez controlable y medición de fuerza,
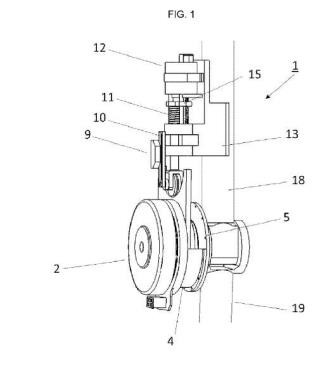
comprende un primer dispositivo (20), que comprende un marco (4) con una cara curva, conectado con un primer elemento motor (2), realizando este primer dispositivo (20) la regulación de la posición de la articulación (1), y un segundo dispositivo (22) que regula la rigidez de la articulación (1), que comprende un elemento de empuje (15) cuyo desplazamiento (D) determina una pre-compresión de un elemento resistivo (11) determinando de este modo la rigidez de la articulación (1), y el primer elemento motor (2) proporciona un giro al marco (4) tal que una rueda (8) del segundo dispositivo (22) recorre la cara curva del marco (4) generando una compresión (C) del elemento resistivo (11) a través de una barra de transmisión (7) asociada a dicha rueda (8) y al elemento resistivo (11).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330882.
Solicitante: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC).
Nacionalidad solicitante: España.
Inventor/es: GARCIA ARMADA,ELENA, CESTARI SOTO,Manuel Javier, SANZ MERODIO,Daniel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
Fragmento de la descripción:
Objeto de la invención
La articulación objeto de la invención se enmarca en el sector de ingeniería mecánica, y se puede utilizar particularmente en el ámbito industrial de la fabricación de aparatos ortopédicos y protésicos, o de dispositivos de ayuda a la movilidad de personas mayores o con discapacidad, en el ámbito de la rehabilitación, exoesqueletos de aumento de potencia y la robótica caminante.
Problema técnico a resolver y antecedentes de la invención.
Tanto los animales como los seres humanos son capaces de tener un amplio rango de movimientos estables ante distintos ambientes con perturbaciones impredecibles, para esto es crucial un control dinámico de la rigidez de las articulaciones a fin de permitir su adaptación a estos posibles cambios. Las articulaciones humanas presentan grupos de músculos que permiten controlar tanto la rigidez de la articulación como su posición, permitiendo así la realización de una gran variedad de modos de locomoción y la simultánea adaptación a distintos suelos con costes energéticos aceptables. En la actualidad un gran número de dispositivos relacionados con la locomoción como prótesis, ortesis, exoesqueletos y robots caminantes intentan integrar dispositivos que emulen el funcionamiento de los músculos naturales a fin de obtener movimientos con mejor eficiencia energética, adaptabilidad, e incrementar la seguridad en la interacción hombre-robot.
En la búsqueda por obtener articulaciones cuyo comportamiento sea similar al de las humanas, que permitan el aprovechamiento de la dinámica natural de los movimientos y la configuración de las características de la articulación ante los distintos requerimientos del movimiento, numerosos diseños e investigaciones están siendo orientados al desarrollo de articulaciones motorizadas capaces de adaptarse a las perturbaciones de un entorno no conocido y con capacidad de almacenamiento de energía para reducir los costes energéticos de la locomoción.
El documento US5650704 presenta uno de los primeros diseños que incorporaban al sistema de actuación un elemento que proporcionase capacidad de adaptación y absorción de choques. Este actuador hace uso de elementos elásticos conectados en serie al tren de
transmisión de potencia y además de permitir atribuir algunas de las características del músculo natural a un actuador eléctrico, permite controlar la fuerza ejercida sobre la carga por el actuador. La principal desventaja de este mecanismo se encuentra en que la rigidez del sistema es fija, por lo que está restringido a una velocidad y carga energéticamente óptima de funcionamiento.
Otros diseños se han enfocado en la modificación de la rigidez de la articulación, con fines de optimización energética y aprovechamiento de la dinámica de la locomoción. El documento "P. Cherelle, V. Grosu, P. Beyl, A. Mathys, R. Van Ham, M. Van Damme, B. Vanderborght and D. Lefeber. `The MACCEPA Actuation System as Torque Actuator in the Gait Rehabilitation Robot ALTACRO International Conference on Biomedical Robotics and Biomechatronics (2010)" presenta la incorporación de un actuador mecánicamente adaptable a un exoesqueleto de rehabilitación, dicho actuador permite una interacción segura entre usuario y máquina y satisface los requerimientos de potencia típicos en rehabilitación de locomoción humana. El documento EP1726412A1 presenta el actuador base utilizado en el exoesqueleto mencionado anteriormente, con la ayuda de elementos elásticos y un motor encargado de variación de posición y otro de la rigidez del sistema controlando ambas características de manera independiente. Este diseño está orientado a la rehabilitación y no propiamente a una variación continua de los parámetros de la articulación para alcanzar mayor eficiencia de locomoción.
El documento "Sebastian Wolf and Gerd Hirzinger' A New Variable Stiffness Design: Matching Requirements of the Next Robot Generatiorí 2008 IEEE International Conference on Robotics and Automation". Describe una articulación destinada a un brazo robótico, en el que un arreglo paralelo permite la variación de la rigidez de la articulación, haciéndola adaptable. Además del motor que mueve la articulación es necesario un motor adicional encargado de la adaptabilidad del sistema, con la característica de que ambos operan de forma antagónica, lo que representa un aumento en el consumo energético. Aun así, a través del aprovechamiento de la dinámica del movimiento y la variación oportuna de la rigidez de la articulación, se obtiene a una reducción de la energía neta del ciclo de operación. La medición de fuerza/torque en la articulación se obtiene a través de la incorporación de un sensor externo de pare entre el actuador y la carga.
El documento WO/2012/038931 A1 presenta varias de las configuraciones desarrolladas principalmente por el Instituto Italiano de Tecnología (NT). Al igual que los diseños previos utilizan 2 motores para actuar de manera independiente sobre la posición de la articulación y
la rigidez de la misma, con la novedad de requerir menor energía asociada a la variación de rigidez ya que ésta no opera en la misma dirección de acción de los elementos que mueven la articulación. El documento "Amir Jafari, Nikos G. Tsagarakis and Darwin G. Caldwell. `AwAS-ll: A New Actuator with Adjustable Stiffness based on the Novel Principie of Adaptable Pivot point and Variable Lever ratio 2011 IEEE International Conference on Robotics and Automation", presenta un actuador de este tipo, cuya implementación final se espera sea en una articulación de rodilla de exoesqueleto. Sin embargo, la disposición de los elementos en esta articulación motorizada resulta en un sistema de dimensiones aún excesivas para la aplicación en exoesqueletos, principalmente por la disposición en paralelo de la mayoría de las piezas del dispositivo y la utilización de un sensor externo de par entre el actuador y la carga.
Todas las articulaciones actuadas que presentan rigidez controlable, se caracterizan por incluir un elemento de medición del par generado en la articulación, conectado en paralelo con el sistema de actuación articular. Al hacer uso de estos elementos conectados tradicionalmente en paralelo con la estructura se obtiene un aumento considerablemente del volumen de la articulación, en absoluto deseable para su uso en exoesqueletos de ayuda a la locomoción pues interesa minimizar su volumen. Esto se puede evidenciar en los diseños del documento WO/2012/038931 A1.
Descripción de la invención
El objeto de la invención es una articulación con rigidez controlable y medición de fuerza, comprende un primer dispositivo que realiza la regulación de la posición de la articulación y un segundo dispositivo que regula la rigidez de la articulación.
El primer dispositivo comprende un marco conectado con un primer elemento motor y el segundo dispositivo también sirve de anclaje del primer dispositivo a la articulación.
El segundo dispositivo comprende un cuerpo de acople, un elemento resistivo, que puede ser del tipo elástico, de amortiguación o combinación de ambos, una barra de transmisión unida por un extremo al elemento resistivo y en el extremo opuesto comprende una rueda, un elemento de empuje con un husillo roscado a su través, en el que se apoya el elemento resistivo y un segundo motor unido al husillo que proporciona un desplazamiento al elemento de empuje mediante un giro del citado husillo.
El desplazamiento del elemento de empuje determina una pre-compresión del elemento resistivo determinando de este modo la rigidez de la articulación, y el primer elemento motor proporciona un giro al marco del primer dispositivo, con el marco teniendo una cara curva tal que, en el giro del marco, la rueda del segundo dispositivo recorre la cara curva del marco, y la barra de transmisión asociada a dicha rueda ocasiona una compresión del elemento resistivo del segundo dispositivo, de modo que esta compresión determina una fuerza desarrollada por el elemento resistivo conocida como F empuje.
El segundo dispositivo de la articulación objeto de la invención comprende un elemento de medición rotacional conectado al segundo motor, dicho elemento de medición rotacional cuenta las revoluciones de un eje del segundo motor, de modo que el desplazamiento del elemento de empuje se conoce realizando una conversión de las revoluciones del segundo motor y del paso del husillo siendo equivalente una revolución del segundo motor al paso del husillo en el desplazamiento lineal del elemento de empuje asociado al husillo, de modo que el desplazamiento del elemento de empuje se conoce mediante la relación:
Desplazamiento = Revoluciones Paso.
El segundo dispositivo de la articulación...
Reivindicaciones:
1.- Articulación (1) con rigidez controlable y medición de fuerza, caracterizada por que comprende dos dispositivos:
- un primer dispositivo (20), que comprende un marco (4) conectado con un primer elemento motor (2), realizando este primer dispositivo (20) la regulación de la posición de la articulación (1),
- un segundo dispositivo (22) que regula la rigidez de la articulación (1) y que sirve de anclaje del primer dispositivo (20) a la articulación (1), que comprende:
- un cuerpo de acople (13) sobre el que se colocan el resto de componentes del segundo dispositivo (22),
- un elemento resistivo (11),
- una barra de transmisión (7) unida por un extremo al elemento resistivo (11) y en el extremo opuesto comprende una rueda (8),
- un elemento de empuje (15) con un husillo (16) roscado a su través, en el que se apoya el elemento resistivo (11),
- un segundo motor (12) unido al husillo (16) que proporciona un desplazamiento (D) al elemento de empuje (15) mediante un giro del citado husillo (16),
donde el desplazamiento (D) del elemento de empuje (15) determina una pre-compresión del elemento resistivo (11) determinando de este modo la rigidez de la articulación (1), y el primer elemento motor (2) proporciona un giro al marco (4) del primer dispositivo (20), con el marco (4) teniendo una cara curva tal que, en el giro del marco (4), la rueda (8) del segundo dispositivo (22) recorre la cara curva del marco (4), y la barra de transmisión (7) asociada a dicha rueda (8) ocasiona una compresión (C) del elemento resistivo (11) del segundo dispositivo (22), de modo que esta compresión (C) y la velocidad con la que ocurre determina una fuerza desarrollada por el elemento resistivo (11) conocida como Fempuje.
2.- Articulación (1) con rigidez controlable y dispositivo de medición de fuerza, según la reivindicación 1, caracterizada por que el elemento resistivo (11) comprende un elemento seleccionado entre un elemento elástico con una constante propia K, un elemento amortiguador con una constante propia A y combinación de los anteriores.
3.- Articulación (1) con rigidez controlable y dispositivo de medición de fuerza, según cualquiera de las reivindicaciones anteriores, caracterizada por que el segundo dispositivo
(22) comprende un elemento de medición rotacional (17) conectado al segundo motor (12), dicho elemento de medición rotacional (17) cuenta las revoluciones de un eje del segundo motor (12), de modo que el desplazamiento (D) del elemento de empuje (15) se conoce realizando una conversión de las revoluciones del segundo motor (12) y del paso del husillo (16) siendo equivalente una revolución del segundo motor (12) al paso del husillo (16) en el desplazamiento lineal del elemento de empuje (15) asociado al husillo (16), de modo que el desplazamiento (D) del elemento de empuje (15) se conoce mediante la relación D = Revoluciones Paso.
4.-Articulación (1) con rigidez controlable y dispositivo de medición de fuerza, según la reivindicación 3, caracterizada por que el segundo dispositivo (22) comprende un elemento de medición lineal (9) y una regla graduada (10) conectada a la barra de transmisión (7), tales que la compresión (C) que sufre el elemento resistivo (11), y la velocidad con la que ocurre, asociada al giro del marco (4) se conoce a través del elemento de medición lineal (9) que mide sobre la regla graduada (10) el desplazamiento de la barra de transmisión (7).
5.-Articulación (1) con rigidez controlable y dispositivo de medición de fuerza, según la cualquiera de las reivindicaciones anteriores, caracterizada por que aprovecha el elemento resistivo (11) asociado a su rigidez para obtener la medida de un par generado en la articulación (1) mediante la relación:
Par = b x Fn, que se convierte en Par = b Fn- sen(q> *) donde
- b, es un vector que representa una distancia entre un eje de rotación de la
articulación (O) y un punto de contacto del marco (4) con la rueda (8), y
- Fn, es la fuerza de contacto entre las superficies del marco (4) y de la rueda (8) en
sentido radial de la rueda (8);
- <p * es un ángulo entre el vector b y el vector Fn,
donde
- b se obtiene de la relación: b = OB2 + R2 - 2 OB R- cos(P) siendo p el ángulo
complementario que define la inclinación del vector de la fuerza de contacto Fn y se obtiene mediante la relación p = 0A- siendo 0 el ángulo de deflexión,
que se obtiene de 0 = acos
ob2+oa2-ba2'
20B- OA
siendo:
- OB: distancia del eje de rotación de la articulación (O) al centro de curvatura de la cara curvada del marco (B);
- O A: distancia del eje de rotación de la articulación (O) al centro de la rueda
(A);
- BA\ distancia del centro de curvatura del marco (B) al centro de la rueda (A)
- <p * se obtiene de la expresión <p *= (3 + cp + 0,
siendo:
- (p = árceos
r2 -----2
b +OA -r2 2-F-Ol
" Fn ~ Fempuje ' COS(<¡p)
siendo:
- F,
empuje
= K C + A Vel
siendo K y A las constantes característica del elemento resistivo (11), C la compresión del elemento resistivo (11) y Vel la velocidad con la que dicha compresión ocurre en el elemento resistivo (11).
6.- Articulación (1) con rigidez controlable y dispositivo de medición de fuerza, según una cualquiera de las reivindicaciones anteriores, caracterizada por que el primer dispositivo (20) comprende, además del marco (4) y el primer elemento motor (2):
- un reductor (3) que tiene una parte fija y una salida, estando unido el marco (4) a la parte fija del reductor (3),
- un primer disco (6) conectado a la salida del reductor (3),
- un segundo disco (5), conectado con el marco (4), en el que se inserta el primer disco (6).
7.- Articulación (1) con rigidez controlable y dispositivo de medición de fuerza, según una cualquiera de las reivindicaciones anteriores, caracterizada por que el cuerpo de acople (13) del segundo dispositivo (22) comprende unos canales guía (14) que guían el movimiento del elemento de empuje (15) y unos huecos pasantes (21) pasando por estos huecos pasantes (21) la barra de transmisión (7).
8.- Articulación (1) con rigidez controlable y dispositivo de medición de fuerza, según una cualquiera de las reivindicaciones anteriores, caracterizada por que el elemento de empuje (15) es una pieza plana cuyo movimiento está limitado por los canales guía (14) del cuerpo de acople (13) del segundo dispositivo (22).
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Robot de instalación de revestimiento, en particular robot de manipulación, del 4 de Septiembre de 2019, de Dürr Systems AG: Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil […]
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot, del 22 de Mayo de 2019, de Warein: Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo […]
Dispositivo para el posicionamiento tridimensional de un componente de acoplamiento y sistema de actuadores, del 27 de Marzo de 2019, de AIRBUS HELICOPTERS DEUTSCHLAND GmbH: Dispositivo para el posicionamiento tridimensional de un componente (KK) de acoplamiento que es parte de una estructura (KS) de acoplamiento accionada […]
Seguridad de un robot de carácter humanoide, del 3 de Diciembre de 2018, de Softbank Robotics Europe: Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 23 de Noviembre de 2018, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; […]