BRAZO MANIPULADOR DE CARGAS CON PARES DE ACTUACION REDUCIDOS.
Brazo manipulador de cargas con pares de actuación reducidos.
La patente describe un brazo manipulador (1,
1', 1'') de cargas con bajos pares de actuación, que comprende varios eslabones (6, 6', 6'', 10, 10', 10'') intermedios unidos entre sí por articulaciones (5, 5', 5'', 9, 9', 9''), donde el último eslabón (14, 14', 14'') está unido a una articulación activa (13, 13', 13''), comprendiendo un mecanismo de cuatro barras (11a, 11a', 11a'', 11b, 11b', 11b'', 12, 12', 12'', 15, 15', 15'') cuya barra de extremo (15, 15', 15''), que se proyecta hacia abajo en dirección vertical, tiene un punto de enganche (23) al que se acopla la carga.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200803462.
Solicitante: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC).
Nacionalidad solicitante: España.
Inventor/es: GONZALEZ DE SANTOS,PABLO, GARCIA ARMADA,ELENA, ARMADA RODRIGUEZ,MANUEL A, SARRIA PAZ,JAVIER F, PONTICELLI,ROBERTO C.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
- B66C23/00 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › Grúas que constan esencialmente de una viga, aguilón o una estructura triangular que actúan como brazo de palanca, montadas de forma que permitan movimientos de traslación o de orientación en planos verticales u horizontales, o bien una combinación de esos movimientos, p. ej. grúas de aguilón, derricks o grúas sobre torres (estructuras de torres que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00).
Fragmento de la descripción:
Brazo manipulador de cargas con pares de actuación reducidos.
Objeto de la invención
El objeto principal de la presente invención es un brazo manipulador de cargas pesadas que reduce los pares de actuación requeridos para mover las cargas. Está dirigido tanto a manipuladores automáticos como a aquellos que son guiados total o parcialmente por operarios.
Antecedentes de la invención
La manipulación de cargas pesadas en puestos fijos de instalaciones industriales ha sido un área de aplicación tradicional de los robots manipuladores. Sin embargo, la capacidad sensorial de estos sistemas es muy inferior a la capacidad sensorial humana. Por estos motivos, en los últimos años se han descrito manipuladores con diferentes grados de libertad pasivos y un número limitado de grados de libertad activos para elevar las cargas. En este contexto, un grado de libertad pasivo es aquel que se mueve directamente con la fuerza que ejerce el operario, mientras que para la manipulación de altas inercias se emplean grados de libertad activos, que son aquellos que se mueven empleando medios hidráulicos, eléctricos o similares.
Los documentos US 4,557,659 y US 6,299,139 describen algunos dispositivos manipuladores de este tipo. El documento US 6,204,620 dispone de un sistema de guiado basado en la fuerza que ejerce el operario sobre unos dispositivos sensorizados. Estos dispositivos se basan en sensores de fuerza o galgas extensométricas que normalmente sólo consideran las componentes verticales, mientras que las componentes horizontales son pasivas y es el operario quien aplica directamente la fuerza.
El documento de número de solicitud ES200202196 describe un dispositivo manipulador para uso en entornos industriales y de servicios que asiste a los operarios en la manipulación e instalación de objetos pesados. En particular, este dispositivo está especialmente indicado para manipulación e instalación de diferentes elementos en construcción de viviendas como: paneles prefabricados para tabiquería, puertas, ventanas, etc.
Descripción de la invención
En el presente documento, llamaremos "eslabones" a cada uno de los elementos del brazo manipulador que están conectados entre sí por "articulaciones". Así, cada articulación corresponde a un grado de libertad del brazo manipulador. Por otro lado, diremos que una articulación es "activa" cuando es accionada por medios hidráulicos, eléctricos, o similares, en contraposición con una articulación "pasiva", que es accionada por el propio operario. Finalmente, se emplearán los términos "distal" y "proximal" para hacer referencia a los extremos de los eslabones respectivamente más lejano y más cercano a la base a la que está anclado el brazo manipulador de la invención.
La presente invención está dirigida a un brazo manipulador de cargas pesadas, que comprende varios eslabones intermedios unidos entre sí por articulaciones activas y/o pasivas, y donde el último eslabón, que está siempre unido a una articulación activa, comprende un mecanismo de cuatro barras cuya barra de extremo se proyecta hacia abajo en dirección vertical y tiene un punto de enganche al que se acopla la carga.
Mediante el empleo del mecanismo de cuatro barras en esta posición se consigue una reducción drástica de los pares y fuerzas requeridos para elevar las cargas. Además, todos los eslabones intermedios están situados por encima de la cabeza del operario, en particular a una altura superior a 2,0 metros, permitiendo que éste se mueva libremente bajo la estructura del brazo manipulador y reduciendo así el riesgo de accidentes.
Normalmente, el mecanismo de cuatro barras que constituye el último eslabón del brazo manipulador es recto. Sin embargo, en realizaciones preferidas de la invención el mecanismo de cuatro barras tiene una curvatura hacia arriba o hacia abajo, lo cual permite aumentar su volumen de trabajo, como se observará en las figuras más adelante en el presente documento.
En una realización preferida más de la invención, la barra de extremo del brazo manipulador de la invención comprende además una muñeca. Una muñeca es un conjunto de articulaciones que permiten orientar las cargas en función de las necesidades de tareas específicas. La muñeca de la invención puede comprender cualquier número de articulaciones dispuestas de cualquier modo. En una realización preferida de la invención, la muñeca comprende una articulación de orientación, para orientar la carga en un plano horizontal, aunque también puede comprender una articulación de cabeceo, para orientar la carga en un plano perpendicular, y también una articulación de balanceo, para balancear la carga. Estas articulaciones se pueden mover de forma independiente o acoplada en diferentes combinaciones, aunque en una realización particular de la invención las articulaciones de cabeceo y balanceo se mueven de forma acoplada.
Finalmente, la presente invención comprende además un sensor dispuesto junto al punto de enganche que proporciona la fuerza y el par originados por la carga en al menos una dirección, preferiblemente tres. Estas medidas serán empleadas por el sistema de control del brazo manipulador para adecuar sus movimientos a las condiciones de la carga.
Descripción de los dibujos
Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferente de realización práctica de la misma, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
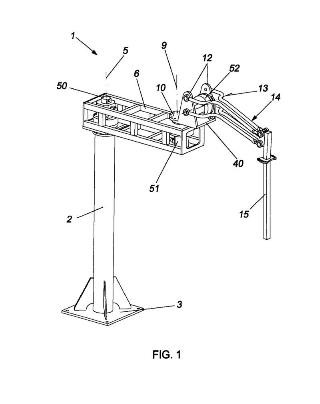
Figura 1.- Muestra un esquema del brazo manipulador de acuerdo con una primera realización preferida de la invención.
Figura 2a y 2b.- Muestran respectivamente una vista lateral y una vista superior del dispositivo de la Fig. 1.
Figura 3a y 3b.- Muestran respectivamente una vista lateral y una vista superior de una segunda realización preferida del brazo manipulador de la invención.
Figura 4. - Muestra una vista lateral de una realización preferida más del brazo manipulador de la invención.
Figura 5.- Muestra otra vista lateral de aún otra realización preferida del brazo manipulador de la invención donde se aprecia el bastidor de anclaje al techo.
Figuras 6.- Muestra una realización preferida de una muñeca de acuerdo con la invención donde las articulaciones de cabeceo y balanceo se mueven independientemente.
Figura 7.- Muestra una realización preferida de una muñeca de acuerdo con la invención donde las articulaciones de cabeceo y balanceo se mueven conjuntamente.
Figura 8.- Muestra un ejemplo de realización en el que la muñeca comprende únicamente una articulación de orientación.
Realización preferente de la invención
Se describen a continuación algunas realizaciones preferidas de la invención, haciendo referencia a las figuras adjuntas. Las Figs. 1, 2a y 2b, en particular, muestran un brazo manipulador (1) para el manejo y desplazamiento de cargas elevadas con pares de actuación reducidos.
El brazo manipulador (1) de este ejemplo consta de un sustentáculo o columna (2) cuyo extremo proximal está fijado a una base (3) anclada al suelo, y que permite mantener toda la estructura del brazo manipulador (1) por encima de la cabeza del operario. Sobre el extremo distal de la columna (2) se sitúa una primera articulación rotatoria (5) de eje vertical, que puede estar accionada por medios eléctricos, hidráulicos, neumáticos u otros, y que en el presente ejemplo es accionada por un motor eléctrico (50). Esta primera articulación rotatoria (5) está conectada al extremo proximal de un primer eslabón (6), de modo que produce un giro relativo de dicho primer eslabón (6) respecto de la columna (2). En este ejemplo, el primer eslabón (6) está formado por una estructura parecida a una viga. A su vez, el extremo distal del primer eslabón (6) dispone de una segunda articulación rotatoria (9) de eje vertical que lo conecta con un segundo eslabón (10), y que está accionada por un segundo motor eléctrico (51). En esta realización particular de la invención, el segundo eslabón (10) está formado por una plancha (40) unida a un par de soportes que constituyen la barra (12), como se explicará más adelante. El segundo eslabón (10) aloja un tercer motor eléctrico (52) junto a su extremo distal para accionar una...
Reivindicaciones:
1. Brazo manipulador (1, 1', 1'') de cargas con pares de actuación reducidos, que comprende varios eslabones (6, 6', 6'', 10, 10', 10'') intermedios unidos entre sí por articulaciones (5, 5', 5'', 9, 9', 9''), caracterizado porque el último eslabón (14, 14', 14'') está unido a una articulación activa (13, 13', 13''), comprendiendo un mecanismo de cuatro barras (11a, 11a', 11a'', 11b, 11b', 11b'', 12, 12', 12'', 15, 15', 15'') cuya barra de extremo (15, 15', 15''), que se proyecta hacia abajo en dirección vertical, tiene un punto de enganche (23) al que se acopla la carga.
2. Brazo manipulador (1, 1', 1'') de acuerdo con la reivindicación 1, caracterizado porque el mecanismo de cuatro barras (11a, 11b, 12, 15) es recto.
3. Brazo manipulador (1, 1', 1'') de acuerdo con la reivindicación 1, caracterizado porque el mecanismo de cuatro barras (11a', 11b', 12', 15') comprende una curvatura hacia abajo que permite aumentar su volumen de trabajo.
4. Brazo manipulador (1, 1', 1'') de acuerdo con la reivindicación 1, caracterizado porque el mecanismo de cuatro barras (11a'', 11b'', 12'', 15'') comprende una curvatura hacia arriba que permite aumentar su volumen de trabajo.
5. Brazo manipulador (1, 1', 1'') de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque la barra de extremo (15, 15', 15'') comprende además una muñeca (60).
6. Brazo manipulador (1, 1', 1'') de acuerdo con la reivindicación 5, caracterizado porque la muñeca (60) comprende al menos una articulación de orientación (19) que permite orientar la carga que se manipula en un plano horizontal.
7. Brazo manipulador (1, 1', 1'') de acuerdo con la reivindicación 6, caracterizado porque la muñeca (60) comprende además una articulación de cabeceo (20) que permite orientar la carga que se manipula en un plano perpendicular.
8. Brazo manipulador (1, V, 1'') de acuerdo con la reivindicación 7, caracterizado porque la muñeca (60) comprende además una articulación de balanceo (21) que permite balancear la carga que se manipula.
9. Brazo manipulador (1, 1', 1'') de acuerdo con la reivindicación 8, caracterizado porque la articulación de orientación (19), la articulación de cabeceo (20) y la articulación de balanceo (21) de la muñeca se mueven independientemente.
10. Brazo manipulador (1, 1', 1'') de acuerdo con la reivindicación 8, caracterizado porque la articulación de cabeceo (20) y la articulación de balanceo (21) de la muñeca se mueven de forma acoplada.
11. Brazo manipulador (1, 1', 1'') de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque comprende un sensor (22) dispuesto junto al punto de enganche (23) que proporciona la fuerza y el par originados por la carga en al menos una dirección.
12. Brazo manipulador (1, 1', 1'') de acuerdo con cualquiera de las reivindicaciones 1-10, caracterizado porque comprende un sensor (22) dispuesto junto al punto de enganche (23) que proporciona la fuerza y el par originados por la carga en al menos tres direcciones.
13. Brazo manipulador (1, 1', 1'') de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque los eslabones (6, 6', 6'', 10, 10', 10'') intermedios se desplazan a una altura mayor que 2,0 metros, reduciéndose así el riesgo de accidentes.
Patentes similares o relacionadas:
Sistema para mover automáticamente un brazo articulado, particularmente de una grúa articulada, del 23 de Octubre de 2019, de FASSI GRU S.p.A: Sistema para mover automáticamente un brazo articulado , que comprende: - dicho brazo articulado , que comprende una pluralidad de cuerpos conectados […]
Disposición consistente en un control y un módulo de control móvil, del 11 de Septiembre de 2019, de PALFINGER AG: Disposición consistente en un control dispuesto o por disponer en un dispositivo de elevación hidráulico y un módulo de control móvil , […]
Dispositivo para soportar un cable de un cabestrante de una grúa, del 19 de Agosto de 2019, de O.ME.FA. S.p.A. Officina Meccanica Fassi: Dispositivo para soportar un cable de un cabestrante de una grúa , comprendiendo: - una estructura de soporte principal ; - […]
Grúa plegable en forma de Z, del 25 de Abril de 2019, de EPSILON KRAN GMBH: Grúa plegable en forma de Z, con - una columna de grúa - un brazo de elevación que está unido articuladamente por un extremo a la columna de […]
Grúa, del 11 de Septiembre de 2018, de EPSILON KRAN GMBH: Grúa con una columna de grúa, dispuesta rotativamente alrededor de un eje vertical en un armazón básico, y con una primera pluma montada […]
PROCEDIMIENTO DE MONTAJE DE UN ELEVADOR EN EL MÁSTIL DE UNA GRÚA TORRE, del 23 de Julio de 2018, de MOTTO ELEVATION,S.L: Procedimiento de montaje de un elevador en el mástil de una grúa torre, a través del acoplamiento de un módulo base, junto al mástil de una grúa torre, […]
Grua de una turbina eólica, del 24 de Abril de 2018, de GAMESA INNOVATION & TECHNOLOGY, S.L: Grúa de una turbina eólica , que comprende una parte fija , una parte pivotante que se une con libertad de giro a la parte fija […]
Método y sistema para levantar y manipular una carga, del 29 de Noviembre de 2017, de FOSTER WHEELER USA CORPORATION: Un sistema para levantar y manipular una carga, comprendiendo el sistema: una grúa pórtico que comprende: un raíl de soporte : […]