CIP-2021 : B25J 9/00 : Manipuladores de control programado.
CIP-2021 › B › B25 › B25J › B25J 9/00[m] › Manipuladores de control programado.
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 9/02 · caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
B25J 9/04 · · por rotación de un brazo al menos, excluyendo el movimiento de la mano, p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
B25J 9/06 · caracterizados por brazos de articulaciones múltiples.
B25J 9/08 · caracterizado por elementos de construcción modulares.
B25J 9/10 · caracterizado por los medios para regular la posición de los elementos del manipulador.
B25J 9/12 · · eléctricos.
B25J 9/14 · · fluidos.
B25J 9/16 · Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
B25J 9/18 · · eléctricos.
B25J 9/20 · · fluidos.
B25J 9/22 · · Sistemas de registro o sistemas de reproducción (en general G05B 19/42).
CIP2021: Invenciones publicadas en esta sección.
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES.
(31/07/2020) 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de:
a) un actuador coadyuvante de la correspondiente articulación del miembro a rehabilitar;
b) una ortesis se emplea para sujetar el equipo al paciente, la ortesis presenta un disco de giro central con sendas barras de estructura, superior (21a) e inferior (21b) montadas con posibilidad de girar en torno al eje de giro (e1); y sendas bridas (22a), (22b), asociadas cada una a la respectiva barra de estructura (21a), (21b).
c) unos sensores capaces de medir los parámetros;
d) una electrónica de control ,
Caracterizado porque:…
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico.
(22/07/2020) Un dispositivo de movilidad que comprende:
un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ;
un componente accionado que es impulsado por el miembro de accionamiento rotatorio ; y
un sistema de acoplamiento magnético y eléctrico que comprende un primer acoplamiento magnético y eléctrico en el conjunto de accionamiento que se acopla magnética y eléctricamente a un segundo acoplamiento magnético y eléctrico en el componente accionado ;
en el que el sistema de acoplamiento magnético y eléctrico incluye una pluralidad de elementos magnéticos ubicados como parte de uno o ambos de…
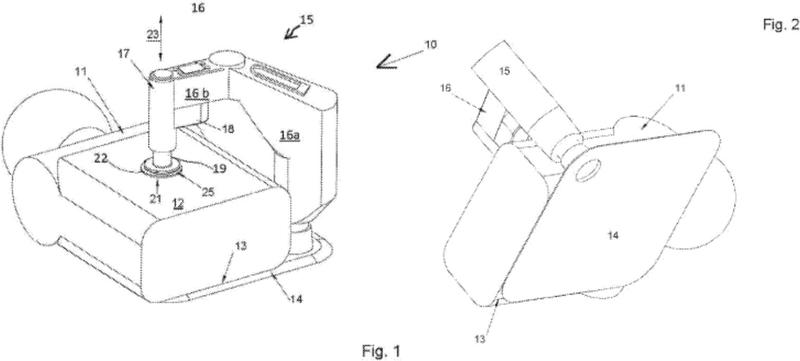
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES.
(09/07/2020). Solicitante/s: Gogoa Mobility Robots, S.L. Inventor/es: FERNANDEZ ISOIRD,CARLOS, DÍAZ GARMENDIA,Iñaki, MARTIN PRADO,Juan Antonio, JUSTO PEREIRA,Xabier.
Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por un motor del que sobresale un vástago (v) concéntrico con el eje de giro (e2) del motor , uniéndose dicho vástago (v) a la barra superior (21a) y una polea unida concéntricamente al disco de giro central , un cable arrollado en la polea por uno de sus extremos, uniéndose dicho cable por su otro extremo al vástago (v) del motor siendo el diámetro de la polea (d2) mucho mayor que el diámetro del vástago (d1).
PDF original: ES-2773112_A1.pdf
Manipulación y aireación automáticas de una pila de hojas de papel.
(08/07/2020) Método de manipulación y de aireación de una pila de trabajo de hojas de papel rectangulares en conexión con el uso de las hojas de papel en un centro de 5 impresión, comprendiendo el método las etapas de:
- proporcionar un dispositivo automatizado que comprende dispositivos de agarre primero y segundo cada uno provisto de dedos (A1, B1) primero y segundo mutuamente opuestos adaptados para acercarse y alejarse uno del otro de manera que sean capaces de agarrar y liberar dicha pila de trabajo entre los mismos, estando cada dispositivo de agarre adaptado para tener al menos cuatro grados de libertad, preferiblemente cinco grados de libertad y más preferiblemente seis grados de libertad,
- insertar…
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL.
(02/07/2020). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: SALAMANCA POBLETE,Hugo, BAEZA RAMIREZ,Luis.
Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica de revestimientos de molinos para la molienda de minerales en procesos de conminución, cuya configuración y operación permita mejorar la tarea de manipulación al poseer un mayor grado de libertad y/o flexibilidad en sus movimientos, proporcionando al procedimiento un mayor grado de certeza y eficacia, por lo tanto optimizando el tiempo de detención del molino por mantenimiento, así como evitar los riesgos a los que se pueda ver sometido el personal de mantenimiento, el sistema comprende al menos una estructura de soporte, al menos un sistema de alimentación y desplazamiento de revestimientos, al menos un sistema manipulador robótico de los revestimientos, al menos una herramienta de manipulación de revestimientos, al menos un sistema de visión artificial y al menos un sistema de control.
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables.
(24/06/2020) Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la cápsula que incluye un robot en una base , la base que tiene una porción superior y una porción inferior , el método que comprende las etapas de:
abrir una puerta de un volumen de almacenamiento del contrapiso , en donde la puerta está conectada de manera giratoria a un piso y se mueve entre una posición cerrada y una posición abierta, en donde en la posición cerrada la puerta se encuentra alineada con el piso y en la posición abierta la puerta se extiende hacia arriba hacia una posición vertical;
elevar la base de manera vertical a través de la abertura que se forma por la puerta…
Accionamiento de un dispositivo que comprende brazos mecánicos.
(17/06/2020) Un mecanismo para accionar el movimiento de un eje que tiene dos grados de libertad, que comprende:
un primer engranaje configurado para girar dicho eje alrededor de la línea central del eje;
un segundo engranaje acoplado operativamente a un tornillo roscado , dicho segundo engranaje configurado para girar dicho tornillo roscado alrededor del eje del tornillo;
un alojamiento en el que se recibe dicho tornillo roscado, extendiéndose dicho alojamiento desde dicho primer engranaje, girando dicho primer engranaje dicho alojamiento cuando se gira dicho eje;
dos elementos de guía acoplados a la rosca de dicho tornillo roscado; en el que un primer elemento de guía está unido a un primer elemento…
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario.
(13/05/2020) Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado al primer eslabón ; un conjunto de soporte para brazo acoplado al segundo eslabón y configurado para pivotar alrededor de un eje horizontal, en donde: el conjunto de soporte para brazo incluye un resorte configurado para generar un par de asistencia que contrarresta la gravedad; y el conjunto de soporte para brazo está configurado para proporcionar el par de asistencia a un brazo de un usuario para soportar el brazo del usuario; y un puño acoplado al conjunto de soporte para brazo y configurado para dar soporte para el brazo del usuario,
caracterizado por que
el segundo eslabón está configurado para pivotar en…
ROBOT HUMANOIDE SERVIDOR DE PRODUCTOS ESPECIALMENTE PARA LA RESTAURACION.
(21/04/2020) 1. Robot humanoide servidor de productos especialmente para la restauración, constituido a partir de un robot humanoide, caracterizado porque se compone de un torso, al menos un brazo articulado, hombros y cabeza que se localiza en un habitáculo, a manera de kiosco. cerrado excepto por su frente en cuyo interior alberga máquinas de café, de zumo, tirador de cervezas u otros líquidos, neveras, enfriador de vinos, y zona para colocar botellas para los cocteles, así como horno, microondas, freidora y plancha. Al lado del robot se localiza una pantalla de ordenador con teclado, monitor y caja de comandos. En la cabeza posee una cámara de visión y en el torso un microprocesador, regulador de…
(15/04/2020) Guante de exoesqueleto provisto al menos de un mecanismo de vinculación individual para cada dedo, en el que el mecanismo de vinculación comprende secciones que están interconectadas con articulaciones para permitir cambiar su orientación angular mutua, caracterizado porque el mecanismo de vinculación comprende una primera vinculación unida al guante , una segunda vinculación conectada a la primera vinculación por medio de una primera articulación , una tercera vinculación conectada a la segunda vinculación por medio de una segunda articulación , y una cuarta vinculación conectada al tercera vinculación por medio de una tercera articulación , en el que la cuarta vinculación está provista de un órtesis de dedo , y la…
Aparato y sistema de brazo articulado.
(08/04/2020) Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato:
un árbol que tiene un eje de rotación, en el que el árbol está configurado para pasar a través de una abertura en la cámara aisladora sellable y está configurado para rotar alrededor del eje;
un elemento de sellado , que incluye:
una superficie de montaje configurada para montar el elemento de sellado en y sellar herméticamente el mismo a una superficie interior de la cámara aisladora sellable, de manera que en uso la superficie de montaje y la superficie interior rodean de manera continua la abertura en la cámara aisladora sellable,
una superficie de sellado de árbol definida por el elemento…
Dispositivo de masaje y/o reanimación cardiopulmonar.
(25/03/2020). Ver ilustración. Solicitante/s: GS Elektromedizinische Geräte G. Stemple GmbH. Inventor/es: HELLER,MICHAEL, STEMPLE,GÜNTER, KLIMMER,CHRISTIAN.
Dispositivo para masaje y/o reanimación cardiopulmonar, con un dispositivo de masaje que presenta un sello de presión que es reversible en una dirección de accionamiento , puede accionarse a través de un propulsor y puede colocarse en la caja torácica de un paciente en un área de contacto deseada , en el que el sello de presión en la caja torácica del paciente puede fijarse al área de contacto deseada y al menos durante un estado de alivio entre dos golpes de masaje está colocado de manera móvil libremente en un plano transversal a la dirección de actuación , caracterizado por que el sello de presión se fija o puede fijarse en un elemento de sujeción que puede fijarse en la caja torácica del paciente , en el que el elemento de sujeción está diseñado como una almohadilla de sujeción adherente que puede adherirse a la caja torácica por medio de una capa adhesiva.
PDF original: ES-2785570_T3.pdf
Estructura modular de exoesqueleto para la asistencia al esfuerzo de un usuario.
(12/02/2020) Estructura modular de exoesqueleto para la asistencia al esfuerzo de un usuario, que comprende:
- un módulo de base que comprende un cinturón lumbar apropiado para rodear la cintura del usuario, una primera batería y una unidad de mando fijadas al cinturón lumbar ,
- un módulo de espalda apropiado para ser fijado sobre la espalda del usuario, comprendiendo el módulo de espalda una segunda batería ,
- una primera pieza de fijación fijada al cinturón y apropiada para cooperar con una segunda pieza de fijación complementaria de un módulo de cadera para sujetar el módulo de cadera al módulo…
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático.
(12/02/2020) Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal de un artículo (A); un soporte temporal para el soporte temporal de una bandeja (V) que está destinada a contener una cantidad predeterminada de artículos (A);
un manipulador , que está estructurado de tal manera que coja y libere un artículo (A) y traslade el artículo (A) entre el plano de soporte y el soporte temporal ; en el que el manipulador comprende un primer elemento de recogida y un segundo elemento de recogida , móviles independientemente uno con respecto…
Estructura de exoesqueleto para la asistencia al esfuerzo de un usuario.
(12/02/2020) Estructura de exoesqueleto para la asistencia al esfuerzo de un usuario, que comprende:
- un primer módulo apropiado para ser fijado sobre una primera parte del cuerpo de un usuario,
- un segundo módulo apropiado para ser fijado sobre una segunda parte del cuerpo del usuario, estando el segundo módulo unido al primer módulo por medio de una articulación que permite una rotación del segundo módulo con respecto al primer módulo ,
- un accionador que comprende un estator y un rotor apropiado para ser accionado en rotación con respecto al estator para desplazar el segundo módulo en rotación…
Módulo de hombro para una estructura de exoesqueleto.
(05/02/2020) Módulo de hombro para una estructura de exoesqueleto, estando el módulo de hombro destinado a unir un módulo de codo fijado sobre un brazo de un usuario a un módulo de espalda fijado sobre la espalda del usuario, comprendiendo el módulo de hombro :
- una pluralidad de piezas de unión , y
- un primer pivote que une dos de las piezas de unión permitiendo una rotación de una de las piezas de unión con respecto a la otra pieza de unión según un primer eje de rotación (X1), cuando tiene lugar una rotación del módulo de codo con respecto al módulo de espalda , que corresponde a un movimiento de abducción…
Control de movimiento de los conjuntos de robot de seguimiento que fabrican aeronaves.
(15/01/2020) Un método que comprende:
disponer un conjunto de robot móvil próximo a un fuselaje de una aeronave que se ensambla y configura para realizar trabajos dentro del fuselaje, un sensor de alcance izquierdo y un sensor de alcance derecho ubicados en el conjunto de robot móvil ;
alinear el sensor de alcance izquierdo del conjunto con un objetivo izquierdo ;
alinear el sensor de alcance derecho del conjunto con un objetivo derecho ;
dirigir el conjunto para que atraviese una ubicación dentro del fuselaje de la aeronave en la que un robot en el conjunto realizará trabajos sobre el fuselaje ;
determinar…
Sistemas y métodos de transportador mecánico y envasado de alimentos.
(08/01/2020) Un aparato de envasado de productos alimenticios que comprende:
un transportador mecánico corriente arriba que transporta artículos alimenticios a un transportador mecánico de cangilones con un conjunto de cangilones conformados para contener pilas de los productos alimenticios;
una estación de alimentación que alimenta las pilas de productos alimenticios del transportador mecánico corriente arriba a los cangilones del transportador mecánico de cangilones; y
una pluralidad de dispositivos de transferencia, asociados cada uno de ellos con una pluralidad de máquinas de envasado;
caracterizado por que el aparato incluye:
un módulo de control que controla el funcionamiento de cada uno de los dispositivos de transferencia y determina cuál de las pilas individuales de los productos alimenticios transfiere cada uno de…
Aparato y procedimiento para separar y desplazar de forma repetida la bolsa de más arriba de una pila de bolsas.
(04/12/2019) Aparato para separar y desplazar repetidamente una bolsa de más arriba de una pila de bolsas que incluye una segunda bolsa de más arriba situada inmediatamente debajo de la bolsa de más arriba en la pila , extendiéndose cada una de la bolsa de más arriba y de la segunda bolsa de más arriba a lo largo de un eje de desplazamiento "X" definido entre un primer extremo y un segundo extremo opuesto de la pila y teniendo una sección de separación próxima al primer extremo de la pila , comprendiendo el aparato :
una mesa de apilado que tiene una superficie de apilado para soportar la pila de bolsas ;
un manipulador de separación…
Dispositivo robótico portable.
(20/11/2019) Un dispositivo robótico portable que comprende:
un primer conjunto de cuerpo que tiene una primera porción de un acoplador de autoalineamiento, de auto-ajuste;
un segundo conjunto de cuerpo que tiene una segunda porción del acoplador de autoalineamiento, de auto-ajuste;
una fuente de energía;
un dispositivo móvil motorizado por la fuente de alimentación y configurado para mover al menos una porción del primer o segundo conjunto de cuerpo con respecto al otro del primer o segundo conjunto de cuerpo; y
un pestillo configurado para estirar la primera porción del acoplador…
Dispositivo de movimiento plano.
(11/11/2019). Solicitante/s: FUNDACION TECNALIA RESEARCH & INNOVATION. Inventor/es: PIERROT,FRANCOIS, COMPANY,OLIVIER, KRUT,Sebastien, BARADAT,Cedric, YANG,HAI, IZARD,JEAN-BAPTISTE, GOUTTEFARDE-TANICH,MARC.
Un dispositivo de posicionamiento que comprende una superficie plana , una plataforma móvil configurada para deslizarse a lo largo de dicha superficie plana y cables para posicionar y mover dicha plataforma móvil a lo largo de dicha superficie plana , comprendiendo la plataforma móvil un sistema de cojinete plano ubicado en el lado de la plataforma móvil configurado para deslizarse a lo largo de la superficie plana , comprendiendo dicho sistema de cojinete plano un medio para permitir el deslizamiento de dicho sistema de cojinete plano con respecto a la superficie plana , estando el dispositivo de posicionamiento caracterizado por que dicho sistema de cojinete plano comprende además medios para empujar la plataforma móvil contra la superficie plana.
PDF original: ES-2730251_T3.pdf
(06/11/2019) Robot industrial con cinemática paralela
con una base de robot ,
con un elemento soporte para alojar una pinza de agarre, una herramienta o un elemento mecánico, con al menos dos unidades de accionamiento móviles que, por uno de sus extremos, están conectadas a unos accionamientos de unidad de accionamiento dispuestos en la base de robot y cuyo otro extremo está conectado de forma móvil al elemento soporte , con un elemento telescópico dispuesto de forma móvil entre la base de robot y el elemento soporte y que está configurado como eje telescópico y/o como cuerpo hueco, en donde el cuerpo hueco aloja unas líneas de alimentación para una pinza de agarre dispuesta en la base de robot, una herramienta o un elemento mecánico y los conduce desde la…
Dispositivo de soporte de fortalecimiento de agarre.
(16/10/2019) Un dispositivo de soporte de fortalecimiento de agarre que tiene al menos una porción de dedo para mejorar el agarre de al menos un dedo correspondiente de un portador por medio de al menos un tendón artificial dispuesto a lo largo de al menos una porción de dedo del dispositivo de soporte de fortalecimiento de agarre,
en el que la porción de dedo comprende un material al menos a lo largo de ambos lados y una punta , y posiblemente a lo largo de un lado dorsal , correspondiente a un dedo de un portador, el al menos un tendón artificial se une a lo largo de ambos lados de la porción de dedo para que el tendón artificial pueda moverse en su dirección de longitud con respecto a los lados de la porción de dedo ,
caracterizado…
MÁQUINA PARA POSICIONAR OBJETOS.
(26/09/2019) 1. Máquina para posicionar objetos, que comprende
- una primera banda transportadora configurada para recibir una pluralidad de objetos (O);
- medios de visión artificial configurados para identificar la posición y la forma de los objetos (O) dispuestos sobre la primera banda transportadora ;
- medios de recogida robotizados configurados para recoger los objetos (O) de la primera banda transportadora según la información recibida de los medios de visión artificial ; y
- una segunda banda transportadora configurada para permitir la salida de dichos objetos (O);
donde dicha máquina comprende una pista de transferencia que presenta una pluralidad de carros de transferencia (7, 7a, 7b, 7c) configurados para recibir los objetos(O) procedentes de los medios de recogida robotizados y entregar dichos objetos…
MÁQUINA Y PROCEDIMIENTO PARA POSICIONAR OBJETOS.
(23/09/2019). Solicitante/s: MULET VALLES,TOMAS. Inventor/es: MULET VALLES,TOMAS, MARTÍNEZ MÉNDEZ,Fernando.
Máquina y procedimiento para posicionar objetos. Dicha máquina comprende una primera banda transportadora configurada para recibir una pluralidad de objetos (O); medios de visión artificial configurados para identificar la posición y la forma de los objetos (O); medios de recogida robotizados configurados para recoger los objetos (O) según la información recibida de los medios de visión artificial ; y una segunda banda transportadora configurada para permitir la salida de dichos objetos (O). La pista de transferencia presenta carros de transferencia (7, 7a, 7b, 7c) configurados para moverse en circuito cerrado a lo largo de la misma permitiendo el control de su velocidad y posición de forma independiente, donde dichos carros de transferencia (7, 7a, 7b, 7c) se encuentran configurados para recibir los objetos (O) procedentes de los medios de recogida robotizados y entregar dichos objetos (O) a la segunda banda transportadora.
PDF original: ES-2725300_A1.pdf
Robot de instalación de revestimiento, en particular robot de manipulación.
(04/09/2019) Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil durante una operación de pintado, con una cinemática de robot para el movimiento de un efector en el espacio, que presenta:
a) un primer elemento de robot dispuesto de forma proximal,
b) un segundo elemento de robot que está dispuesto cinemáticamente detrás del primer elemento de robot y es móvil con respecto al primer elemento de robot ,
c) un primer brazo de robot con una cinemática en paralelo, estando dispuesto el primer brazo de robot cinemáticamente detrás del segundo elemento de robot y siendo móvil con respecto al segundo elemento de robot , y
d) un tercer elemento de robot ,…
Sistema de manipulación de productos alimenticios.
(28/08/2019) Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios en una dirección longitudinal;
b) una estación de llenado ;
c) un suministro de contenedores abiertos por arriba desplazados a lo largo de la dirección longitudinal y que pueden moverse en la dirección longitudinal hacia la estación de llenado ; y
d) un sensor electrónico configurado para capturar datos de ubicación de uno o más productos alimenticios en la superficie de transporte principal del transportador principal dentro de un rango de…
Dispositivo de aplicación de fluido.
(21/08/2019) Un aparato, que comprende:
una plataforma ;
una fuente de fluido asociada con la plataforma y configurada para dispensar un fluido ;
un brazo asociado con la plataforma y configurado para extenderse desde la plataforma ;
un aplicador asociado con el brazo y configurado para recibir el fluido dispensado por la fuente de fluido en el que el aplicador está configurado para su uso en la aplicación del fluido sobre una superficie ; y
un sistema de movimiento del aplicador configurado para mover el aplicador , en donde el sistema de movimiento del aplicador comprende un primer sistema de movimiento configurado para girar el aplicador alrededor de un…
Método para el manejo de pilas de sustratos flexibles.
(07/08/2019) Método para manejar pilas de sustratos flexibles por medio de una pinza , la pinza que está dispuesta en un brazo de un robot y que tiene un dedo inferior y un dedo superior correspondiente, que comprende el citado método los pasos de insertar el citado dedo inferior debajo de un sustrato inferior de una pila que descansa sobre una base y el citado dedo superior encima de un sustrato superior de la pila , y agarrar la pila sujetándola entre dicho dedo inferior y dicho dedo superior, caracterizado por los pasos adicionales de
levantar toda la pila a un estado pendiente levantando primero una parte delantera (20') de la pila por medio de la pinza y, mientras se deja que la pinza siga una dirección de inclinación natural de la citada parte delantera (20') de la pila, levantando la pinza para que se dirija verticalmente…
Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo.
(31/07/2019) Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado en relación al medio de mecanizado (BM);
en donde el medio de mecanizado (BM) presenta al menos un control numérico para el control de al menos un eje primario (PA);
en donde la sincronización continua de una posición de mecanizado del medio de mecanizado (BM) con la respectiva posición de la pieza de trabajo (WS) está proporcionada mediante el seguimiento del al menos un eje primario (PA);
en donde un transmisor de posición (LG) está acoplado mecánicamente a la pieza de trabajo (WS);
de modo que el transmisor…
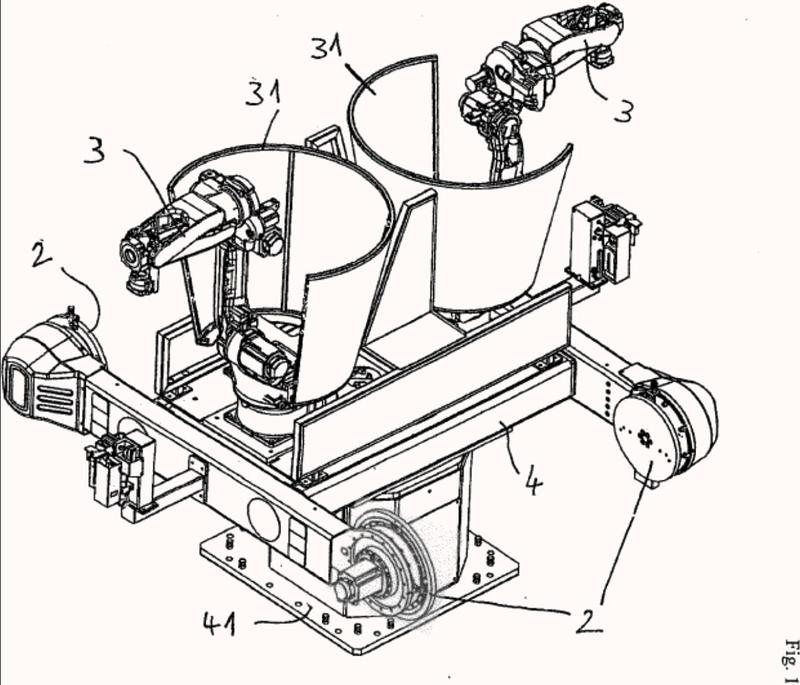
(31/07/2019). Ver ilustración. Solicitante/s: YASKAWA Europe GmbH. Inventor/es: NIEDERMEIER,JOSEF.
Procedimiento para el mecanizado de piezas de trabajo con un dispositivo , el cual presenta un bastidor giratorio , al menos dos robots proporcionados en el bastidor giratorio ; en donde una protección de soldadura rodea respectivamente al menos de manera parcial a los robots ; y en donde la protección de soldadura está diseñada de manera que puede rotar conjuntamente con los respectivos robots; y al menos un primer y un segundo posicionador de piezas de trabajo , los cuales están proporcionados en el bastidor giratorio ; con los siguientes pasos:
Colocación de al menos una primera pieza de trabajo en el primer posicionador de piezas de trabajo ; y
Mecanizado de la primera pieza de trabajo mediante los robots y rotación simultanea del bastidor giratorio.
PDF original: ES-2753380_T3.pdf
Sistema de control para un guante de refuerzo.
(24/07/2019) Sistema de control para un guante de refuerzo con por lo menos un dedo del guante, sistema de control el cual está dispuesto para reforzar un movimiento de agarre realizado por una mano de una persona que lleva el guante, sistema de control el cual comprende por lo menos un medio de sensor de detección dispuesto para detectar, en por lo menos dos ubicaciones de medición diferentes en el lado de la palma de dicho por lo menos un dedo del guante, una fuerza respectiva entre un dedo respectivo de una persona que lleva el dedo del guante respectivo y una superficie de contacto respectiva sobre la cual se aplica dicho movimiento de agarre, sistema de control el cual adicionalmente comprende por lo menos un medio de accionamiento dispuesto…
{kind=link}
{kind=link}