Sistema de manipulación de productos alimenticios.
Sistema de transporte para llenar envases con productos alimenticios (150),
que comprende:
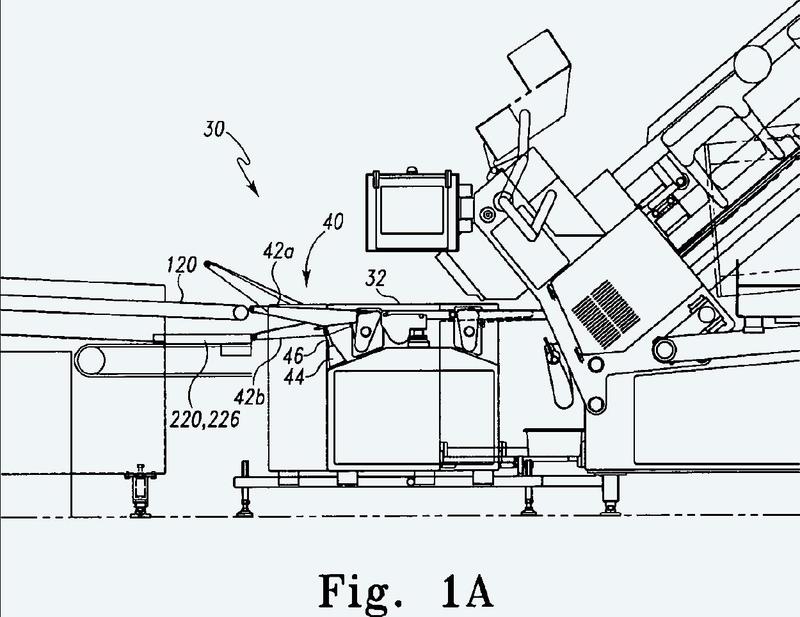
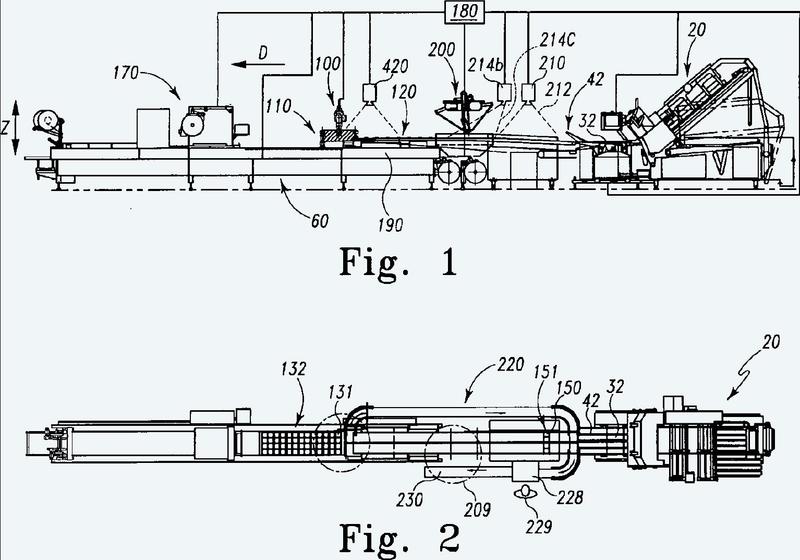
a) un transportador principal (120) que mueve los productos alimenticios (150) en una dirección longitudinal;
b) una estación de llenado (110);
c) un suministro de contenedores (131) abiertos por arriba desplazados a lo largo de la dirección longitudinal y que pueden moverse en la dirección longitudinal hacia la estación de llenado (110); y
d) un sensor electrónico (420) configurado para capturar datos de ubicación de uno o más productos alimenticios (150) en la superficie de transporte principal del transportador principal (120) dentro de un rango de sensor (430) del sensor (420);
e) un robot de transporte (100) que comprende una pinza (160) para sujetar los productos alimenticios (150) y que presenta un área de trabajo (410) que abarca por lo menos entre una parte del transportador principal (120) y una parte de la estación de llenado (110) y configurado para mover los productos alimenticios (150) desde el transportador principal (120) hasta un contenedor (131) abierto por arriba en la estación de llenado (110),
f) en el que el robot de transporte (100) está adaptado para mover uno o más productos alimenticios (150) en la dirección longitudinal desde el transportador principal (120) hasta una posición de destino fuera del transportador principal (120) para envasar los productos alimenticios (150) en los contenedores (131) abiertos por arriba;
g) un controlador (180) conectado mediante señal al sensor electrónico (420) y al robot de transporte (100) y configurado para recibir datos capturados por el sensor (420) y configurado para dar instrucciones al robot de transporte (100) para que mueva uno o más productos alimenticios (150) desde el transportador principal (120) hasta una posición de destino fuera del transportador principal (120);
caracterizado por que
h) una parte aguas abajo del transportador principal (120) es un transportador de banda que comprende una pluralidad de cintas (330, 332, 334, 336), estando cada cinta (330, 332, 334, 336) separada de las cintas adyacentes por un hueco (331, 333, 335); presentando dichos huecos (331, 333, 335) una anchura por lo menos tan ancha como un brazo de pinza (160) de manera que permita que una parte de los brazos (161a-f, 162a-f) de pinza pase entre las cintas (330, 332, 334, 336) del transportador principal (120) y debajo de una superficie de transporte del transportador principal (120), y
i) la pinza (160) comprende por lo menos dos brazos (161a-f, 162a-f) de pinza encarados opuestos;
j) la pinza (160) comprende una posición abierta para liberar un producto alimenticio (150), y una posición cerrada para sujetar y transportar un producto alimenticio (150);
k) los brazos (161a-f, 162a-f) de pinza están más separados entre sí cuando la pinza (160) se encuentra en la posición abierta que cuando se encuentran en la posición cerrada.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11006933.
Solicitante: FORMAX, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 9150 191ST STREET MOKENA, ILLINOIS 60448 ESTADOS UNIDOS DE AMERICA.
Inventor/es: LINDEE,SCOTT A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- B25J9/00 B25J […] › Manipuladores de control programado.
- B65B25/06 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 25/00 Embalaje de otros objetos que presentan problemas particulares (atadura en paquetes B65B 27/00). › Embalaje de rodajas o trozos de carnes, queso u otros productos blandos o pegadizos de formas particulares.
- B65B57/14 B65B […] › B65B 57/00 Dispositivos de control automático, de verificación, de alarma, o de seguridad (posicionado del material de envoltura o formando receptáculo alimentado a partir de bobinas B65B 41/18). › y cuyo funcionamiento manda o para la alimentación de los objetos o productos a embalar.
PDF original: ES-2755774_T3.pdf
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]
DISPOSITIVO DE MANIPULACIÓN PARALELA CON DOS GRADOS DE LIBERTAD, del 24 de Febrero de 2012, de Centre National de la Recherche Scientifique (CNRS) FUNDACION FATRONIK: Dispositivo de manipulación paralela con dos grados de libertad que comprende un bastidor , un primer brazo de bastidor , un segundo brazo de bastidor (3'), estando […]