Sistema de tratamiento para tratar una pieza móvil.
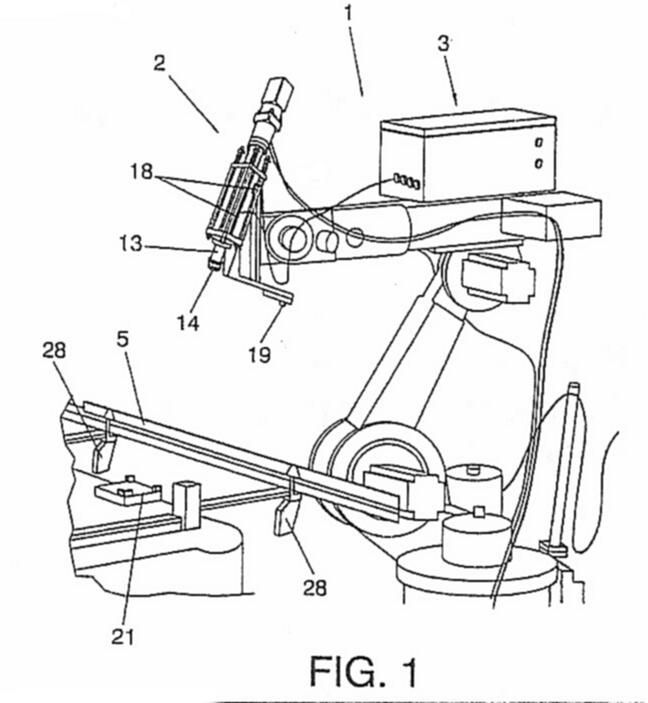
(08/04/2015) Sistema de tratamiento para tratar una pieza móvil por medio de un robot industrial , que puede acoplarse rígidamente, de forma intermitente, a la pieza y/o a una unidad portapieza móvil , en el que el robot industrial está en la posición operativa desacoplada soportado por un dispositivo portador , que puede moverse por medio de una unidad de tracción que actúa con tracción activa independientemente de la pieza, y está en la posición operativa acoplada montado de forma flotante con respecto al dispositivo portador por medio de un sistema de alojamiento flotante , caracterizado por que una unidad…
{kind=link}
{kind=link}
{kind=link}
{kind=link}