CIP-2021 : G05B 19/19 : caracterizado por sistemas de control de posición o de control de contorno,
p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
CIP-2021 › G › G05 › G05B › G05B 19/00 › G05B 19/19[3] › caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
Notas[n] de G05B 19/19: - En el presente grupo, el sistema de medida para un eje se utiliza para medir el desplazamiento a lo largo de ese eje. Esta medida se utiliza como señal de realimentación de la posición en el sistema de servocontrol.
G FISICA.
G05 CONTROL; REGULACION.
G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K).
G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00).
G05B 19/19 · · · caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
CIP2021: Invenciones publicadas en esta sección.
Dispositivo de control para máquina herramienta y máquina herramienta provista de dicho dispositivo de control.
(27/05/2020) Un dispositivo de control (C) para una máquina herramienta provisto en una máquina herramienta que tiene una herramienta de corte para cortar una pieza de trabajo (W), medios rotatorios para hacer rotar relativamente la herramienta de corte y la pieza de trabajo (W), medios de alimentación para alimentar la herramienta de corte y la pieza de trabajo (W) en una dirección de alimentación predeterminada, y medios de vibración para hacer vibrar relativa y recíprocamente la herramienta de corte y la pieza de trabajo (W) a lo largo de la dirección de alimentación,
comprendiendo el dispositivo de control (C) una sección de control (C1) para hacer que la máquina herramienta mecanice la pieza de trabajo (W) mediante la rotación relativa…
Equipo de control con optimizador integrado.
(11/03/2020) Equipo de control para una maquina con al menos un eje , en donde el equipo de control esta programado con un programa de sistema, en donde el equipo de control esta configurado de tal modo que
- en una primera etapa (S1) a traves de una interfaz hombre-maquina recibe primeros parametros (P1),
- en una segunda etapa (S2) mediante los primeros parametros (P1) concreta un primer problema tecnologico general en un primer problema tecnologico especial,
- en una tercera etapa (S3) mediante el primer problema tecnologico especial determina una primera parametrizacion de un problema de optimizacion,
- mediante el problema de optimizacion parametrizado con la primera parametrizacion dentro del equipo de control, por medio de un optimizador para una secuencia de valores…
Procedimiento para controlar un movimiento, equipo de control y accionamiento lineal.
(04/03/2020) Procedimiento para controlar un movimiento de varios rotores (L) de un accionamiento lineal (LA), presentando el accionamiento lineal (LA) varios segmentos (Seg) y los rotores (L), incluyendo el procedimiento al menos las siguientes etapas:
•Prescripción de una secuencia de movimiento (BA) a lo largo de varios segmentos para varios rotores (L) mediante una secuencia en el tiempo de posiciones o velocidades de varios rotores sobre una pluralidad de segmentos,
• transformación de la secuencia de movimiento (BA) de los distintos rotores (L) en una correspondiente prescripción para un respectivo eje virtual (VA), reproduciendo…
Máquina de mecanizado y procedimiento para mecanizar piezas de trabajo.
(25/09/2019) Máquina de mecanizado para mecanizar piezas (W) de trabajo esencialmente en forma de placa, que están compuestas preferiblemente, al menos por secciones, de madera, materiales derivados de la madera, materiales de trabajo compuestos o plásticos, presentando la máquina de mecanizado:
un dispositivo de mecanizado para mecanizar una pieza de trabajo en un sentido (R) de mecanizado, un dispositivo de registro óptico,
una unidad de evaluación, y
una unidad de control,
estando diseñado y dispuesto el dispositivo de registro óptico de tal manera que puede registrar ópticamente secciones (Q1, Q2) de extremo delanteras y traseras con respecto al sentido (R) de mecanizado de una pieza (W) de trabajo que debe…
SISTEMA DE CONTROL ROBUSTO POR MODOS DESLIZANTES DE UN MOTOR AC.
(11/07/2019). Solicitante/s: INSTITUTO TECNOLÓGICO METROPOLITANO. Inventor/es: ARBELAEZ TORO,Juan Jose, RODRÍGUEZ LEDESMA,César Augusto.
La presente invención se relaciona con un sistema de control robusto por modos deslizantes de un motor AC en el que se utiliza un variador de frecuencia como elemento final de control. La acción de control es ejecutada por un controlador que ejecuta el algoritmo de control por modos deslizantes.
Procedimiento para controlar y/o regular un accionamiento lineal, equipo de control, accionamiento lineal e instalación.
(19/06/2019) Procedimiento para controlar y/o regular un accionamiento lineal (LA), que presenta al menos un segmento (Seg), varios rotores (L), al menos un puesto de máquina (MS1, MS2) y un equipo de control (SE),
- en el que un rotor (L) correspondiente se mueve con ayuda del segmento (Seg), de los que al menos hay uno, en una dirección (x),
- en el que al menos una parte de al menos un segmento (Seg) se encuentra en una zona de influencia (EB) del puesto de máquina (MS1, MS2),
- en el que el movimiento del rotor (L) correspondiente se controla y/o regula mediante el equipo de control (SE) y/o una unidad de control (U),
- en el que el control se realiza en base a una secuencia de movimiento (BA) para el rotor (L) correspondiente,
…
Procedimiento de aplicación de un producto de revestimiento sobre una pieza desplazada por un transportador e instalación de aplicación de un producto de revestimiento.
(17/05/2019) Procedimiento de aplicación de un producto de revestimiento sobre una pieza desplazada por un transportador , a lo largo del cual está dispuesto al menos un pulverizador móvil en un plano oblicuo o perpendicular a un eje de desplazamiento (X12) del transportador, estando este procedimiento caracterizado porque comprende las etapas automatizadas siguientes, que consisten en:
a) determinar en un punto de referencia fijo (X12, Y12, Z12), las coordenadas de los puntos (A1, B1, C1, A2, B2, C2) de una o varias líneas (L1, L2) de perfil exterior de la pieza repartidas sobre la longitud de la pieza,
b) atribuir a cada pulverizador los puntos de cada línea de perfil exterior que se encuentran en su campo de pulverización,
c) entre los puntos atribuidos a cada pulverizador,…
Procedimiento para la determinación de valores de corrección de la distancia en el procesamiento por láser de una pieza de trabajo y máquina de procesamiento por láser pertinente.
(20/03/2019) Procedimiento para la determinación de valores de corrección de la distancia (ΔA) de una distancia teórica entre una boquilla de procesamiento por láser dispuesta en un cabezal de procesamiento por láser y una pieza de trabajo en el procesamiento por láser de la pieza de trabajo , en donde se mide capacitivamente hasta la pieza de trabajo en el procesamiento por láser la distancia (A) de la boquilla de procesamiento por láser que se mueve a lo largo de una trayectoria teórica y se regula sobre la distancia teórica corregida.
caracterizada por que
la pieza de trabajo tanto con la boquilla de procesamiento por láser como también con un cabezal de medida…
Dispositivo de control para una máquina herramienta y máquina herramienta provista de dicho dispositivo de control.
(27/02/2019) Un dispositivo de control (C) para una máquina herramienta que se proporciona en una máquina herramienta que tiene una herramienta de corte para cortar una pieza de trabajo (W), un medio de rotación para hacer rotar relativamente la herramienta de corte y la pieza de trabajo (W), un medio de alimentación para alimentar la herramienta de corte y la pieza de trabajo (W) en una determinada dirección de alimentación, y un medio de vibración para hacer vibrar en vaivén relativamente la herramienta de corte y la pieza de trabajo (W),
teniendo el dispositivo de control (C) una sección de control (C1) para hacer que la máquina de control mecanice la pieza de trabajo (W) a través de la rotación relativa de la herramienta de corte y la pieza de trabajo (W) y a través de la alimentación de la herramienta…
Aparato de control numérico.
(13/06/2018) Un dispositivo de control numérico dispuesto para llevar a cabo una mecanización sobre una pieza de trabajo mientras se mueve una herramienta y la pieza de trabajo, cada una con relación a la otra, a lo largo de una trayectoria de movimiento con vibraciones por medio de ejes de accionamiento con los que se ha dotado la herramienta o la pieza de trabajo, comprendiendo el dispositivo:
una unidad de análisis de relación de la amplitud de vibración respecto a alimentación , dispuesta para analizar si una relación entre una amplitud de las vibraciones y una velocidad de alimentación de la herramienta respecto a la pieza de trabajo está incluida en un programa de mecanización , y dispuesta para obtener la relación entre una amplitud de las vibraciones…
Control modular de un accionamiento lineal con comunicación.
(25/04/2018) Procedimiento de control para un accionamiento lineal,
• en el que varias secciones secuencialmente consecutivas del accionamiento lineal son controladas en cada caso por un equipo de control asociado a la respectiva sección ,
• en el que convertidores controlados por el correspondiente equipo de control alimentan con corriente (I) en cada caso una subsección individual de la respectiva sección y en su totalidad la respectiva sección ,
• en el que los equipos de control prescriben en cada caso nuevos valores de consigna (I*) a los convertidores controlados por ellos,
…
Robot con articulaciones de rigidez variable y procedimiento de cálculo de dicha rigidez optimizada.
(22/11/2017) Robot dotado de capacidades de desplazamiento en al menos una cadena articulada que comprende, al menos, un sensor de contacto del extremo de dicha cadena con la superficie de desplazamiento, comprendiendo dicha cadena al menos una articulación , controlada dicha articulación por un motor eléctrico controlado por una instrucción de posición y/o velocidad y por medios de limitación de la corriente y/o del par aplicado por dicho motor a dicha articulación, caracterizándose dicho robot porque comprende también:
a) una primera lógica de cálculo del par articular como siendo solución de una ecuación que modela el equilibrio dinámico del robot entre, por una parte, la suma de la diferencia de las fuerzas inerciales debidas a la aceleración angular de la articulación y de la aceleración de la gravedad y del efecto de las fuerzas de Coriolis…
Estructura de controlador para amortiguar vibraciones de baja frecuencia.
(12/10/2016) Estructura de controlador para posicionar una carga por medio de un motor eléctrico (M), con una instalación para la amortiguación activa de vibraciones de baja frecuencia no deseadas,
- con un controlador de la posición , al que se alimenta una desviación de una posición real (x_ist) de la carga respecto de una posición de referencia (x_nom), y que emite una velocidad de referencia (v_nom),
- con un controlador de velocidad , al que se alimenta una desviación de una velocidad real (v_ist) de la carga respecto de la velocidad de referencia (v_nom),
- así como con un controlador de corriente , al que se alimenta una desviación de una corriente real (i_ist) del motor (M) respecto de la corriente de referencia (i_nom), y que emite una tensión de referencia para el funcionamiento del motor (M),
- en el que en…
Dispositivo de comprobación de interferencias, procedimiento de comprobación de interferencias, y máquina herramienta que tiene el dispositivo de comprobación de interferencias.
(04/05/2016) Procedimiento de comprobación de interferencias en un aparato, estando provisto el aparato de una pluralidad de cuerpos amovibles que pueden moverse en una dirección predeterminada, medios de movimiento para mover la citada pluralidad de cuerpos amovibles, y otros medios de movimiento para mover al menos uno de los citados cuerpos amovibles en la misma dirección de línea axial que uno de los medios de movimiento, y se realiza una comprobación de interferencias cuando el citado al menos uno de los citados cuerpos amovibles se mueve, que comprende las etapas de:
designar un cuerpo en movimiento que tiene una posibilidad de ser interferido, e introducir los ejes de movimiento del citado cuerpo en movimiento;
…
Controlador de soporte de brazo de vehículo de obras públicas, sistema de control para vehículo de obras públicas y procedimiento de control.
(06/06/2013) Un controlador de pluma de vehículo de obras públicas, que comprende: una pantalla táctil que comprende unvisualizador y un sensor táctil, una unidad controladora del visualizador, una unidad de control de visualización y unaunidad de generación de órdenes de control; en el que
la pantalla táctil muestra una marca de detección del accionamiento, detecta un toque exterior y genera una señal dedetección táctil que refleja una posición de un punto de toque sobre la pantalla táctil;
la unidad controladora del visualizador, en respuesta a una orden de control de visualización desde la unidad decontrol de visualización, proporciona unas instrucciones de visualización a la pantalla táctil para controlar uncontenido visualizado en la…
MÉTODO PARA LA REDUCCIÓN DE LA VIBRACIÓN RESIDUAL GENERADA POR UNA SEÑAL DE EXCITACIÓN O CONTROL TRANSITORIA, EN SISTEMAS VIBRATORIOS CON CUALQUIER VALOR DE AMORTIGUAMIENTO, MEDIANTE EL AJUSTE DEL CONTENIDO FRECUENCIAL DE DICHA SEÑAL.
(01/02/2013) Método para la reducción de la vibración residual generada por una señal de excitación o control transitoria, en sistemas vibratorios con cualquier valor de amortiguamiento, mediante el ajuste del contenido frecuencial de dicha señal.
La presente invención tiene por objetivo la reducción de vibraciones residuales provocadas por la excitación de una señal transitoria en sistemas genéricos vibratorios lineales con cualquier valor de amortiguamiento, y está especialmente indicada en sistemas con razones de amortiguamiento superiores a 0,3, complementando la patente P200700044. Esta señal puede corresponder, por ejemplo, a una ley de movimiento de una inercia.
El método consiste…
Método para comprobar y controlar una máquina de doblamiento por rodillos para doblar en continuo una pieza de trabajo alargada con radios de curvatura variables, y máquina controlada de esta forma.
(30/01/2013) Un método para comprobar y controlar una máquina de doblamiento por rodillos para doblar en continuo unapieza de trabajo alargada (T) con radios de curvatura variables, de tal manera que la máquina de doblamiento porrodillos utiliza una serie de rodillos de accionamiento para doblar , estando el método caracterizado por quelas siguientes etapas de:
- medir la distancia de la pieza de trabajo alargada en un punto que está situado aguas abajo con respecto adicha serie de rodillos de accionamiento para doblamiento , y que se extiende en una dirección de unmedidor de distancia , de manera que dicha medición de distancia se lleva a cabo para obtener ladistancia entre dicho un punto y una posición fija del medidor de distancia en instantes sucesivos;
- calcular…
Una máquina para curvar de manera continua una pieza de trabajo con radios predeterminados.
(15/06/2012) Una máquina para curvar de manera continua una pieza de trabajo alargada según unos radios de curvatura predeterminados, máquina que usa una serie de rodillos motrices para curvar, y un ordenador que está acoplado entre otros a un medidor láser a distancia para calcular un radio de una sección curvada y comparar el radio de curvatura calculado con el radio de curvatura deseado en dicha sección curvada, estando el ordenador acoplado también a un medidor de longitud para medir una longitud de dicha sección curvada concéntricamente según la pieza de trabajo (T) alargada y a unos medios de operación adaptados para operar un rodillo de la serie de rodillos motrices para ajustarlo en tiempo real basándose en una diferencia entre dicho radio de curvatura medido y dicho radio de curvatura…
MÉTODO Y APARATO PARA DETERMINAR LA ROTACIÓN DE UN MOTOR EN UN SISTEMA DE VENTANA ELÉCTRICA O SIMILAR.
(04/11/2011) Un método, que comprende: recibir una entrada de control para controlar una posición de una ventana ; aplicar una tensión eléctrica a un motor acoplado a la ventana en respuesta a la entrada de control de modo que se provoca la rotación de un rotor del motor; medir la intensidad de corriente que fluye en el motor como resultado de la tensión eléctrica; actualizar la tensión eléctrica aplicada al motor en respuesta a una entrada de control subsiguiente ; caracterizado por: calcular una fuerza contraelectromotriz asociada a la rotación del rotor en respuesta a dicho paso de actualizar; determinar si ha cambiado un signo de la fuerza contraelectromotriz; en el caso de que el signo de la fuerza contraelectromotriz haya cambiado , determinar un instante de tiempo en el…
DISPOSITIVO DE REGULACIÓN AUTOMÁTICA DE LOS SERVOCONTROLES DE UN SIMULADOR MECÁNICO DE MOVIMIENTOS Y DISPOSITIVO ASOCIADO.
(30/05/2011) Procedimiento de regulación utilizado en un simulador de movimiento que puede soportar una carga, comprendiendo dicho simulador un dispositivo mecánico y una unidad de control, comprendiendo dicho dispositivo mecánico unos medios de arrastre para poner en movimiento un plato apto para soportar dicha carga; un amplificador de corriente apto para accionar dichos medios de arrastre en respuesta a una señal de mando; un sensor apto para medir una posición de dicho plato; y dicha unidad de control que comprende un corrector apto para emitir dicha señal de mando en función de una señal de consigna de posición y de dicha posición medida, caracterizado porque permite regular automáticamente dicho corrector para servocontrolar en posición el movimiento de dicho plato que soporta una carga dada, comprendiendo dicho procedimiento: - una etapa inicial de síntesis…
METODO PARA LA REDUCCION DE LA VIBRACION RESIDUAL GENERADA POR UNA SEÑAL DE EXCITACION O CONTROL TRANSITORIA MEDIANTE EL AJUSTE DEL CONTENIDO FRECUENCIAL DE DICHA SEÑAL.
(26/04/2011) Método para la reducción de la vibración residual generada por una señal de excitación o control transitoria mediante el ajuste del contenido frecuencial de dicha señal.La presente invención tiene por objetivo la reducción de vibraciones residuales provocadas por la excitación de una señal transitoria en sistemas genéricos vibratorios con comportamiento lineal. Esta señal puede corresponder, por ejemplo, a una ley de movimiento de una inercia, o a una entrada de fuerza excitadora del mismo.El método descrito consiste en la utilización de señales de excitación cuyo contenido frecuencial sea nulo en las frecuencias fi, y el ajuste de esta señal para que dichas frecuencias coincidan con las frecuencias propias del sistema vibratorio. Se consigue así anular esta vibración en…
PROCEDIMIENTO Y DISPOSITIVO PARA EL MECANIZADO DE PIEZAS DE TRABAJO EN FORMA DE PLACAS.
(08/03/2011) Procedimiento para el posicionamiento de una herramienta en una pieza de trabajo en movimiento mediante un accionamiento, comprendiendo el accionamiento un motor lineal que en una primera etapa está sometido a una regulación por trayectoria a lo largo de un recorrido predeterminado y que se conmuta a continuación en una segunda etapa en el proceso de aplicación a una regulación por fuerza, realizándose el posicionamiento de la herramienta en la pieza de trabajo en movimiento mediante el accionamiento por medio de un tope y mecanizándose la pieza de trabajo mediante la herramienta después del proceso…
PROCEDIMIENTO Y DISPOSITIVO PARA EL REGLAJE DE UNA POSICIÓN DE MECANIZACIÓN CON DETERMINACIÓN DE LA LÍNEA DE MECANIZACIÓN REAL EN COMPARACIÓN CON LA LÍNEA DE MECANIZACIÓN PROGRAMADA DE LA HERRAMIENTA DE MECANIZADO.
(03/03/2011) Procedimiento para el ajuste o reglaje de la posición de mecanizado o bien del punto real de la mecanización de una herramienta que realiza un movimiento relativo respecto de una pieza de trabajo , determinando sobre la pieza de trabajo a mecanizar, en forma continua o consecutiva en intervalos de tiempo cortos especificados, un primer punto sobre el resultado de la mecanización obtenido por la herramienta de mecanizado y un segundo punto sobre una vía de mecanizado especificada, sobre la pieza de trabajo , caracterizado porque entre dichos dos puntos se crea o bien se calcula una línea de unión que es una recta o bien corresponde en su forma y su desarrollo a la vía de mecanizado , y porque la distancia (A), en particular la distancia normal, del punto real de la mecanización es determinado…
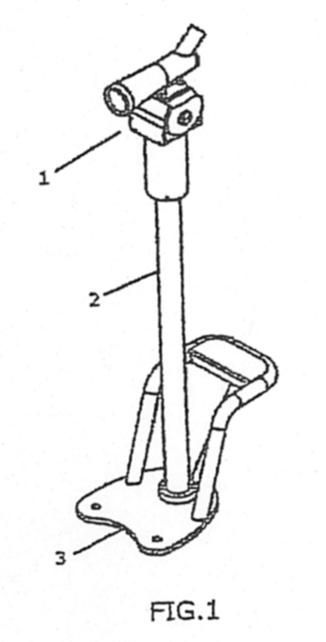
(16/06/2008). Ver ilustración. Solicitante/s: COMPONOSOLLERTIA, S.A.L.. Inventor/es: COMIN ESCARTIN,RICARDO, DE PEDRO IIGO,JOSE MIGUEL.
Telescopio interactivo, que además de contar con los medios propios de un equipo para visión empleados por los telescopios, tiene asociados unos medios de almacenamiento y reproducción de información multimedia asociada, que son activados en función de la posición alcanzada por la cabeza del telescopio, contando para ello con una cabeza articulada con doble eje, sobre los cuales hay asociados unos medios reconocimiento de posición, como por ejemplo encoders, de manera que alcanzada una determinada posición y transmitida a un PLC o microprocesador, éste activa la información adicional asociada, pudiendo ser de tipo auditiva o, auditiva con una señal de vídeo que se superpone a la imagen natural exterior, o una señal auditiva junto con una señal de vídeo realizándose una transición entre la imagen natural exterior y la señal de vídeo, empleando para ello un obturador junto con un espejo de doble capa.
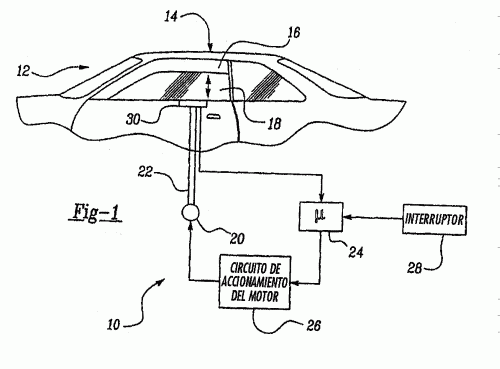
PROCEDIMIENTO Y SISTEMA PARA LA DETERMINACION DEL MOVIMIENTO DE UN MOTOR EN UN SISTEMA ELEVALUNAS ELECTRICO DE VEHICULO.
(16/11/2006). Ver ilustración. Solicitante/s: MERITOR LIGHT VEHICLE SYSTEMS, INC.. Inventor/es: TYCKOWSKI, JOSEPH.
Procedimiento para la detección de un cambio de posición de un motor de accionamiento eléctrico en un sistema elevalunas eléctrico de vehículo , comprendiendo el procedimiento: detectar una corriente del motor, generando la corriente una señal de entrada (Vc2) que tiene una fase asociada a la misma; generando una señal de referencia (VOSC) que tiene una fase predeterminada y una frecuencia asociada a la misma; comparando la fase de la señal de entrada con la fase de la señal de referencia; y determinando el movimiento del motor basándose en la comparación, caracterizado porque la comparación comprende además: determinar una diferencia entre la fase de la señal de entrada y la fase de la señal de referencia; y ajustar la frecuencia de la señal de referencia basándose en la diferencia.
PROCEDIMIENTO Y DISPOSITIVO DE CONTROL DE VELOCIDAD ANGULAR DE UNA CADENA ELECTROMECANICA POCO AMORTIGUADA.
(16/07/2006) Procedimiento de control de velocidad de una carga arrastrada en rotación por un motor eléctrico a través de una cadena electromecánica poco amortiguada, según el cual se mide la velocidad real del motor y se determina una magnitud de referencia * de accionamiento en par del motor a partir de la velocidad medida m del motor y de una velocidad de referencia *L de la carga , caracterizado porque se determina dicha magnitud de referencia *: - calculando una velocidad estimada L de la carga por un observador cuyas entradas son la magnitud de referencia * y un error de innovación representado por la diferencia ponderada entre la velocidad medida m del motor y una velocidad estimada m del motor; - calculando…
ROBOT ASISTENTE PARA LA REALIZACION DE FUNCIONES DE INSTRUMENTISTA QUIRURGICO EN EL ENTORNO DE UN QUIROFANO.
(01/06/2006). Ver ilustración. Solicitante/s: UNIVERSIDAD DE ALCALA.. Inventor/es: BOQUETE VAZQUEZ,LUCIANO, DAPENA CRESPO,MIGUEL A., BAREA NAVARRO,RAFAEL, GARCIA-SANCHO TELLEZ,LUIS.
Robot asistente para la realización de funciones de instrumentista quirúrgico en el entorno de un quirófano. Formado por un brazo robot industrial , una unidad de proceso para el control del sistema; la unidad de proceso controla los movimientos del brazo robot y además tiene incorporado el hardware para la captura y digitalización de imágenes provenientes de varias cámaras , digitalización de la señal de varios micrófonos comunicados con un sistema reconocedor de comandos vocales y del locutor que los ha pronunciado, control sobre un sistema de iluminación y salida de audio generado en un sintetizador de voz. El funcionamiento integrado de todos los elementos permite reconocer comandos vocales de diferentes personas, identificando el locutor y ejecutando los movimientos necesarios para recoger y entregar el instrumental utilizado en una operación quirúrgica, realizando las funciones de un instrumentista quirúrgico.
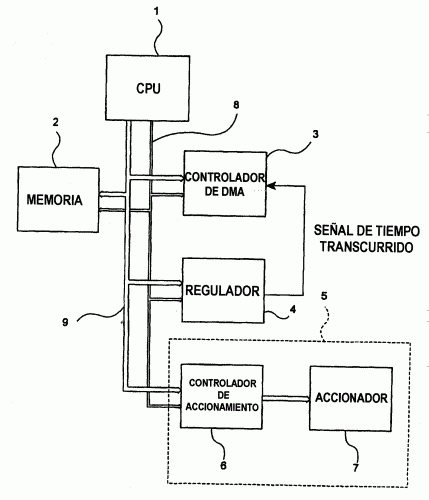
DISPOSITIVO DE CONTROL DE ACCIONAMIENTO Y METODO PARA CONTROLAR UN MECANISMO DE ACCIONAMIENTO Y MEDIO DE ALMACENAMIENTO DE DATOS QUE REALIZA UN PROGRAMA DE ORDENADOR.
(16/07/2005). Ver ilustración. Solicitante/s: SEIKO EPSON CORPORATION. Inventor/es: KAWASE, YUJI.
Un dispositivo de control de accionamiento para controlar un mecanismo de accionamiento que incluye medios de control de accionamiento y medios (7; 7;7, 74) de accionamiento controlados por los medios 6 de control de accionamiento, que comprende: medios de generación de datos para generar conjuntos de datos plurales que incluyen cada uno datos de control para controlar los medios (7; 7; 7, 74) y datos de regulación asociados para controlar el momento en el que los datos de control son enviados a los medios de control de accionamiento, y para aplicar una primera señal de inicio para iniciar la transmisión de datos a los medios de control de accionamiento; medios de almacenamiento para almacenar los datos de regulación y los datos de control; medios de regulador para iniciar una operación de regulación cuando se reciben datos de regulación y para enviar una señal de tiempo transcurrido cuando un periodo de tiempo especificado por los datos de regulación transcurre.
SISTEMA DE MICROPOSICIONAMIENTO.
(16/03/2004) Un sistema de microposicionamiento para realizar operaciones de fabricación o inspección de un artículo, que comprenda: una fuente de radiación para proyectar una imagen ; un detector de radiación para detectar la imagen proyectada ; medios de transporte de herramientas para transportar una herramienta adaptados para efectuar operaciones de fabricación o inspección; medios de procesador para calcular al menos las coordenadas bidimensionales de la imagen proyectada detectada por el detector de radiación con relación a la herramienta y medios de control para supervisar los medios de transporte de herramientas para posicionar la herramienta en una relación espacial predeterminada con la imagen proyectada como respuesta a una señal de los medios de procesador, que se caracteriza…
PROCEDIMIENTO Y APARATO PARA EXCITAR CONVERTIDORES DE ROTACION.-TRASLACION.
(16/12/2003) Procedimiento para comandar un conjunto que comprende un motor eléctrico y un convertidor de rotación-traslación conectado a dicho motor eléctrico , cuyo procedimiento comprende las etapas de: alimentar dicho motor eléctrico con una corriente (I) que presenta un primer valor (I1) para obtener un par motor que venza el rozamiento interno de dicho convertidor de rotación-traslación ; e incrementar dicha corriente (I) hasta que dicho motor eléctrico proporcione un par motor total, que es convertido por dicho convertidor de rotación-traslación en una fuerza predeterminada (F1) sobre un objeto desplazable por dicho convertidor…
PROCEDIMIENTO DE REGULACION PARA EL MANTENIMIENTO DE LA POSICION DE ROTACION DE UN MOTOR ELECTRICO.
(01/03/2003). Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: MACK, ROLF.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO DE REGULACION PARA MANTENER LA POSICION ANGULAR DE UN MOTOR ELECTRICO EN EL CUAL SE MANTIENE UNA POSICION TEORICA DEL ROTOR MEDIANTE UNA UNIDAD DE REGULACION. UTILIZANDO MEDIDAS SENCILLAS SE CONSIGUE EL AUTOFRENADO NECESARIO POR CUANTO AL SEPARAR EL ROTOR DE SU POSICION TEORICA INICIAL, SE AJUSTA POR MEDIO DE UNA FUERZA ANTAGONISTA UNA POSICION TEORICA MODIFICADA EN UNA PRIMERA MAGNITUD ESPECIFICADA O ESPECIFICABLE EN UN PRIMER SENTIDO, PORQUE DESPUES DE CADA VEZ QUE SE SEPARA EL ROTOR DE LA POSICION TEORICA SE AJUSTA UNA POSICION TEORICA NUEVA MODIFICADA EN EL PRIMER SENTIDO HASTA QUE SE ALCANCE UN NUMERO ESPECIFICADO N DE VARIACIONES DE POSICION TEORICA, PORQUE DESPUES DE ALCANZAR LA VARIACION DE POSICION TEORICA DE ORDEN N SE EFECTUA EL DESPLAZAMIENTO A UNA POSICION TEORICA DE ORDEN (N + 1), QUE CON RESPECTO AL PRIMER SENTIDO SE ENCUENTRA EN EL LADO OPUESTO A LA POSICION TEORICA INICIAL.
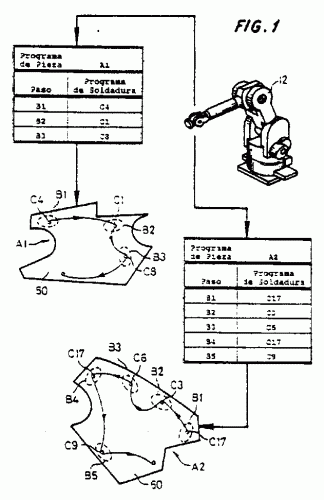
SISTEMA DE SOLDADURA MIG/MAG Y EQUIPO PARA SU IMPLEMENTACION.
(01/03/2001). Ver ilustración. Solicitante/s: SUNARC, S.A.. Inventor/es: SALA MASIP,ENRIC, ANGLADA PARE,LUIS.
Sistema de soldadura MIG/MAG y equipo para su implementación. Consiste en la memorización de programas de pieza (A1, A2, ... An), cada uno específico para una pieza, comprendiendo las siguientes fases: (a) determinación secuencial de una pluralidad de pasos (B1, B2, ... Bn) a efectuar por un equipo de soldadura sobre una pieza ; (b) asignación a cada uno de dichos pasos (B1, B2,...Bn) de un programa de soldadura (C1, C2, ... Cn), seleccionable, comprendiendo dichos programas de soldadura (C1, C2, ... Cn) las siguientes fases: (a) determinación de una selección de condiciones iniciales; (b) asignación de valores a una pluralidad de parámetros de control de soldadura en función de las condiciones iniciales; (c) asignación de valores a una pluralidad de parámetros de supervisión de soldadura en función de los parámetros de control, y a sus respectivos márgenes de tolerancia. **FIGURA** .
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}